雷达站站址误差对多机协同航迹欺骗干扰的影响分析
2015-10-28 03:05王国宏吴健平
海军航空大学学报 2015年6期
王国宏,杨 忠,吴健平
(1.海军航空工程学院a.信息融合研究所;b.研究生管理大队,山东烟台264001;2.国防信息学院,武汉430000)
雷达站站址误差对多机协同航迹欺骗干扰的影响分析
王国宏1a,杨忠1b,吴健平2
(1.海军航空工程学院a.信息融合研究所;b.研究生管理大队,山东烟台264001;2.国防信息学院,武汉430000)
多机协同航迹欺骗干扰是专门针对雷达网的一种新的电子干扰手段。文章在介绍了多机协同航迹欺骗干扰基本原理的基础上,重点对雷达网内雷达站址误差对航迹欺骗干扰的影响进行了分析,推导了有关理论模型,并以融合中心采用K近似域(K-NN)航迹关联准则为背景,仿真分析了雷达站址误差对航迹欺骗干扰的影响,得出了雷达站址误差对航迹欺骗干扰性能有重要影响、但此影响随电子战飞机与雷达站间的距离增大而降低的结论。
多机协同;航迹欺骗;雷达网;站址误差;K-NN
多机协同航迹欺骗是专门针对雷达网的一种新的电子干扰手段,得到了许多学者的关注[1-4],其中,文献[1]最早提出多机协同航迹欺骗的基本概念,建立了多机协同飞行的航路规划模型;文献[2]提出采用分散模型预测控制技术实现电子站飞机编队的协同控制;文献[3]进一步验证了多机协同航迹欺骗的可行性;文献[4]将最优控制理论引入到了航路规划问题中,提出了一种在线的实时控制技术。
实际应用中,敌方各雷达站的站址是通过电子侦察等手段获取,难免存在误差[5-7],而上述关于电子战飞机编队航迹欺骗的研究均是假定不存在雷达站址误差情况下得到的。雷达站址误差对电子战飞机编队航迹欺骗的影响如何,是实际工程应用中需要关注的问题[8]。本文分析了电子战飞机在航迹欺骗过程中雷达站址误差和融合中心K近似域(K-NN)航迹关联准则对航迹欺骗干扰的影响,得出了一些结论,对开展雷达网航迹欺骗干扰和雷达网抗航迹欺骗干扰具有一定的参考价值。
1 雷达站址误差对多机协同航迹欺骗干扰的影响
多机协同航迹欺骗的基本原理如图1所示,其中,Sa、Sb、Sc表示雷达,Ea、Eb、Ec表示干扰方派遣的电子战飞机。在实施干扰之前,干扰方要提前设计出要进行的航迹欺骗,包括期望生成的虚假航迹以及各电子战飞机的飞行航路。在航迹欺骗过程中,电子战飞机要在相应的时间节点飞临预定的空间位置,利用随机携带的电子干扰设备进行干扰,并通过协同控制,使得干扰信号形成的虚假目标在空间上巧妙重合,如图1中P1、P2所示,最终实现对雷达网的欺骗。在实际应用中,由于航迹欺骗过程必然包含来自多方面的误差,因而更为一般的航迹欺骗模型见图2。
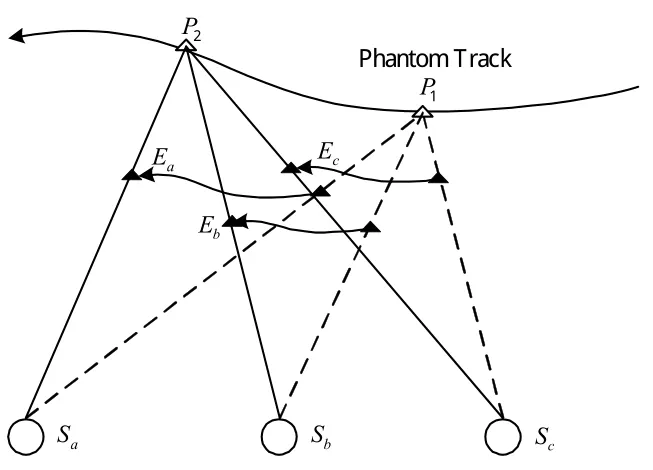
图1 航迹欺骗的基本原理Fig.1 Basic principle of track deception
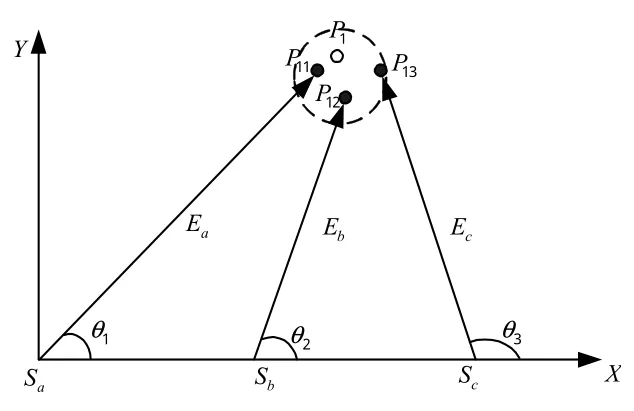
图2 电子战飞机转发的虚假目标Fig.2 False targets of ECAVs
图2中,P1是电子战飞机编队预期产生的理想虚假目标,P11、P12、P13是由电子战飞机Ea、Eb、Ec分别干扰雷达Sa、Sb、Sc所形成的测量点迹。由于航迹欺骗过程中存在各方面的误差,导致P11、P12、P13偏离了预设虚假目标P1。由于雷达网在数据融合处理的过程中将会利用航迹关联或者点迹关联对公共监区内的航迹(点迹)进行相关性检验,当P11、P12、P13之间的偏差足够大时,由它们生成的虚假航迹(点迹)在关联检验的过程中就会被剔除,从而达不到预期的航迹欺骗效果。
引起实际虚假目标偏离预设虚假目标的原因是多方面的。下面主要分析雷达站址误差对航迹欺骗干扰的影响。
假设在同一时刻,电子战飞机编队为雷达网释放的虚假目标集为,其中,q对应雷达网内的雷达数量。假设虚假目标Pi的位置坐标为XPi=[xPi,yPi],i=1,2,…,q,则虚假目标Pi与虚假目标Pj(i≠j)之间的距离为

相应的,所有虚假目标之间的平均距离为[9]:

显然,虚假目标之间的平均距离越小,则它们的空间相关性就越高。在理想条件下Dij=0(i≠j),并且=0,也即虚假目标之间完全重合。
从航迹欺骗的基本原理可知,在干扰方对雷达网进行航迹欺骗之前,需要对雷达站进行侦察定位。定位不准将使电子战飞机实际释放的虚假目标偏离预先设计的虚假目标,如图3所示。
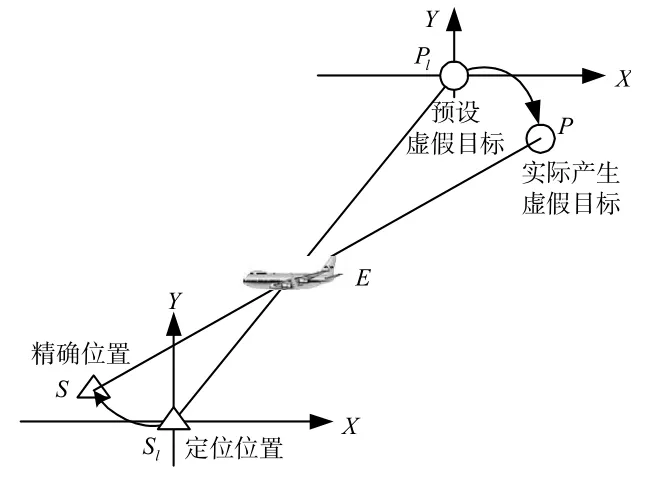
图3雷达站址误差对虚假航迹欺骗的影响Fig.3 Influence of false track deception with radar location error
图3中,Sl=[xsl,ysl]T为电子战飞机编队事先侦察获得的雷达位置,S=[xs,ys]T为雷达的真实位置。由于侦察过程存在误差,导致Sl偏离S。令δs=Sl-S=[Δxs,Δys]T为雷达的站址误差,设P、Pl的位 置 分 别 为P=[xp,yp]T、Pl=[xpl,ypl]T,定 义δp=P-Pl=[Δxp,Δyp]T为虚假目标偏离误差。下面分析雷达站址误差与虚假目标偏离误差的大小关系。
假设电子战飞机的位置坐标为E=[xe,ye]T,则电子战飞机与图3中4个点的距离分别为:
由于电子战飞机对雷达脉冲的距离延时始终是根据产生预设虚假目标而计算,因此,DEPl=DEP,并且根据图3中的几何关系可知:

将式(7)、(8)代入可得:
在雷达站址误差较小的情况下,DES≈DESl,此时相应地有

要说明的是,在实施航迹欺骗之前,电子飞机就已经获取了雷达站的位置坐标,因而在整个航迹欺骗过程中,雷达站址误差为常量。从站址误差转换因子的定义可知,ε的取值只能在较小的范围内变化,结合式(10)可知,由雷达站址误差引起的虚假目标偏离误差也几乎是一个常量。
另外,对于分布式雷达网,航迹欺骗的最终目的是在雷达网的融合中心形成具有空间相关性的虚假航迹[10],但是在雷达网数据处理过程中,首先需要对来自各部雷达的航迹进行关联检验,若虚假航迹组合不能通过航迹关联,那么它们就达不到航迹欺骗的效果。因此,航迹关联准则对航迹欺骗干扰效果也有重要的影响。在各种航迹关联算法中,K-NN航迹关联方法是一种综合性能好且易于工程实现的方法[6],KNN航迹关联算法认为,在N0次最近邻航迹关联检验中,若至少有K次关联成功,则判断参与关联的目标状态估计与来源于同一个目标,其中几种常用的K-NN判决准则包括2/3准则、3/4准则和4/7准则等。
2 仿真实验
2.1仿真场景设置
以3架电子战飞机对3部雷达的航迹欺骗为背景,假设3部雷达的距离量测误差标准差均为100m,方位角量测误差标准差均为0.1°,3部雷达的精确位置分别为 Sa=(10 000m,0m)、Sb=(20km,5km)、Sc=(30 000m,0m),电子战飞机为雷达网预设的虚假目标初始状态为(15km,326m/s,100km,0m/s)。
干扰历时100 s,在0~9 s内预设虚假目标做匀速直线运动;之后,预设虚假目标在各时间段做匀加速运动,其中,10~29 s内加速度大小为(5m/s2,-2m/s2),30~55 s内加速度大小为(-2m/s2,4m/s2),56~79 s内加速度大小为(0,-5m/s2),80~90 s内加速度大小为(0,0);最后,在91~100 s预设虚假目标又回到匀速直线运动。
在整个过程中,电子战飞机始终限制在对应雷达与预设虚假目标的连线上,并且假设它们与对应雷达站之间距离保持恒定,分别为 DEaSa=35km,。在理想条件下,电子战飞机编队对雷达网的欺骗场景如图4所示。

图4 多机协同航迹欺骗场景Fig.4 Track deception scene of multi-aircraft cooperative
2.2仿真结果
1)虚假目标之间的平均距离。在上述初始条件下,须考虑雷达站址误差对虚假航迹空间相关性的影响。假设电子战飞机获取的雷达位置分别偏离各自的精确位置)。此时,实际虚假航迹仿真结果如图5 a)所示。
其他条件不变,逐渐增大3部雷达的站址误差(增大步数为10步),使均匀增大到均匀增大到均匀增大到(200m,-200m)。得出雷达站址误差较大时实际虚假航迹偏离预设虚假航迹,仿真结果如图5 b)所示。
图5 雷达站址误差对航迹欺骗的影响Fig.5 Influence of track deception with radar location error
2)虚假目标航迹关联。假设雷达网内各雷达采用Singer滤波方法对量测数据进行滤波,滤波形成的航迹被送往融合中心,在融合中心利用K-NN法对虚假航迹进行关联检验,得出雷达站址误差对虚假目标航迹关联的影响的仿真结果如表1、图6所示。
表1 不同雷达站址误差下虚假目标航迹关联率Tab.1 Phantom track association ratio under different radar location error
图6 雷达站址误差对虚假目标航迹关联的影响Fig.6 Effect of radar location error on phantom track association
2.3仿真结论
仿真看出,在航迹欺骗过程中,雷达站的站址误差使实际虚假目标偏离了电子战飞机编队预先设计的虚假目标,实际虚假目标偏离误差的大小与雷达站址误差正相关;雷达站址误差达,时,实际虚假目标间的平均距离达到1km左右,说明雷达站址误差对航迹欺骗的效果影响非常大,在多机协同航迹欺骗过程中,若电子战飞机对雷达网内雷达的定位不准,可能使干扰失去意义;随着电子战飞机与雷达站间的距离增大,雷达站址误差对虚假航迹造成的影响逐渐降低;同时,随着雷达网融合中心采用不同的航迹关联准则,也会对航迹欺骗干扰性能产生一定的影响。
3 结论
本文分析了雷达网内雷达站址误差对航迹欺骗干扰的影响,并进行了理论分析和仿真验证,仿真结果表明,雷达站址误差对航迹欺骗干扰性能有重要影响,随着电子战飞机与雷达站之间的距离增大,雷达站址误差对虚假航迹造成的影响逐渐降低;同时,随着雷达网融合中心采用不同的航迹关联准则,也会对航迹欺骗干扰性能产生一定的影响。
[1]PACHTER M,CHANDLER P R,PURVIS K B,et al. Multiple radar phantom tracks from cooperating vehicles using range-delay deception[C]//Proceedings of the 4thInternational Conference on Cooperative Control and Optimization.Destin,FL,2003:1-14.
[2]SAMMARTINO P F,BAKER C J,GRIFFITHS H D,et al.Decentralize model predictive control of cooperating UAVs[C]//43rdConference on Decision and Control.Atlantis,2004:4286-4291.
[3]PURVIS K B,CHANDLER P R,PACHTER M.Feasible flight paths for cooperative generation of a phantom radar track[J].Journal of Guidance,Control,and Dynamics,2006,29(3):653-661.
[4]PURVIS K B,ASTROM K J,KHAMMASH M.Online control strategies for highly coupled cooperative UAVs[C]//IEEE American Control Conference.New York,2007:3961-3966.
[5]BROWN R G,HWANG P Y.Introduction to random signals and applied kalman filtering[M].3rded.New York:Wiley,1997:323-325.
[6]PURVIS K B,ÅSTRÖM K J,KHAMMASH M.Estimating radar positions using cooperative unmanned air vehicle teams[C]//Proceedings of Amerenca Control Conference.Portland,OR,2005:3512-3517.
[7]QU YAOHONG,WU JIZHI,ZHANG YOUMIN.Cooperative localization based on the azimuth angles among multiple UAVs[C]//InternationalConference on UnmannedAircraft Systems.Atlanta,2013:947-958.
[8]KOSAKA M,MIYAMOTO S,IRAHA H.A track correlation algorithm for Multisensor intergration[C]//Procedings of the IEEE/AIAA 5thDigital Avionics Systems Conference.1983:1-8.
[9]何友,王国宏,陆大金,等.多传感器信息融合理论与应用[M].北京:电子工业出版社,2010:141,146. HE YOU,WANG GUOHONG,LU DAJIN,et al.Multisensor information fusion with applications[M].Beijing:Publishing House of Electronics Industry,2010:141,146.(in Chinese)
[10]PURVIS K B,ASTROM K J,KHAMMASH M.Estimation and optimal configurations for localization using cooperative uavs[J].IEEE Transactions on Control Systems Technology,2008,16(5):947-958.Influence Analysis of Radar Location Error on Multi-Aircraft Cooperative Track Deception
WANG Guohong1a,YANG Zhong1b,WU Jianping2
(1.Naval Aeronautical and Astronautical University a.Institute of Information Fusion;b.Graduate Students’Brigade,Yantai Shandong 264001,China;2.PLA Academy of National Defense Information,Wuhan 430000,China)
As a novel electronic interference method,multi-aircraft cooperative phantom track deception can release living phantom tracks for radar network.Firstly,basic theory of multi-aircraft cooperatively track deception was introduced,with which basis,influence of radar location error on track deception was key analyzed,and correlative theroy model is de⁃duced.Then,for K-NN track correlation in fusion center as the background,influence of radar location error on track de⁃ception was simulated,results that radar location error had a great influence on performance of track deception,and the in⁃fluence reduce with increase of the distence between electronic combat aircraft vehicles and radar network were obtained.
multi-aircraft cooperative;track deception;radar network;radar location error;K-NN
TN974
A
1673-1522(2015)06-0501-04DOI:10.7682/j.issn.1673-1522.2015.06.001
2015-08-15;
2015-09-28
部委科研基金资助项目(51307060301)
王国宏(1963-),男,教授,博士,博导。
猜你喜欢
军事文摘(2022年17期)2022-09-24
舰船科学技术(2022年11期)2022-07-15
小哥白尼(军事科学)(2022年1期)2022-04-26
军事运筹与系统工程(2019年1期)2019-11-16
无人机(2018年1期)2018-07-05
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
IT经理世界(2014年10期)2014-05-29
中国信息化·学术版(2013年5期)2013-10-09
小哥白尼·趣味科学画报(2006年1期)2006-02-15