
基于BP法的3-RRP并联机构位置正解研究*
2015-11-02 06:34李瑞琴
组合机床与自动化加工技术 2015年2期
韩 霄,李 虹,李瑞琴
(中北大学机械与动力工程学院,太原 030051)
基于BP法的3-RRP并联机构位置正解研究*
韩 霄,李 虹,李瑞琴
(中北大学机械与动力工程学院,太原 030051)
并联机构的位置正解是并联机器人机构应用的基础也是研究机构运动学中的难点之一。常用的解法有解析法和数值法两种,但是这两种解法在针对一些复杂机构时求解难度比较大,而且求出的解不唯一。文章研究了BP神经网络在并联机构位置正解中的应用,通过位置逆解结果和训练学习,实现驱动工作空间到机构动平台变量空间的非线性映射,求解出3-RRP并联机构的运动学正解。最后给出一组仿真实例,通过仿真出得的计算结果可以看出该方法的有效性与可行性。
并联机构;位置正解;BP神经网络
0 引言
并联机构较传统串联机构相比有精度大,承载能力强,刚度大等一系列的优点,少自由度并联机构与六自由度并联机器人相比,可以满足大多数工业操作要求,且结构简单,是并联机器人领域的一个重要分支[1]。由于近年来少自由度并联机构在微制造业和医疗航天领域的发展,使得少自由度并联机构越来越受到业内学者的关注。刘平安[2]主要以柔性关节和3-DOF平面并联机器人为对象,研究其在微动机器人中的设计和分析,对开发新型微操作并联机器人系统具有重要的意义。
并联机构的运动学分析包括了机构的位置分析,工作空间分析,速度、加速度分析,这些分析都必须建立在正确算出机构位置正、逆解的基础上。然而并联机构的正解、逆解相对串联机构来说相对比较困难,尤其是正解的计算更是并联机构研究的一个难点。常用的解法有两种:解析法和数值法,这两种方法在针对不同机构的时候各有优缺点,但是都存在运算量大,求解不易等特点。解析法是先建立约束方程,然后对约束方程进行化简消元,消除方程中多余未知数,求解出方程的解。但是解析法的推导过程非常复杂,需要很强的数学技巧。同样数值法相对解析法简单一些,但计算量大,计算速度慢且不能完整求出机构的位置解。
刘延斌[3]提出了关于机构位置正解的一种新的数值解法,并且运用计算机软件matlab对该机构位置正解进行仿真,验证所研究方法的正确性。周结华等[4]的基于改进型迭代神经网络的三自由度并联机构位置正解的分析中运用改进,高效的神经网络对所研究的4SPS-1S结构进行位置正解的求解,最后再利用计算机软件仿真验证了该方法的优越性。现在越来越多的学者[5-10]开始采用智能算法对一些复杂机构进行求解。
本文根据所研究的3-RRP并联机构,为了避免传统算法中的一些不足,提出了运用BP神经网络对其位置正解求解的方法。通过建立适合该机构的神经网络模型求解出机构的位置正解。
1 BP神经网络算法
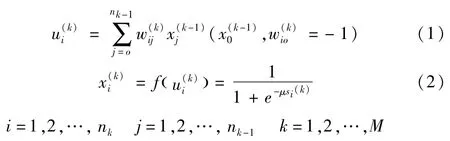
BP神经网络是目前应用较多的一种神经网络结构。它可以任意精度逼近任意非线性函数,其实质就是将一组训练样本的输入输出问题转变为一个非线形优化问题,具有良好的优化性能,并且结构简单,是一种性能优良的神经网络也是当前应用最广泛的一种网络。BP网一般采用多层结构,包括输入层、多个隐含层、输出层,隐节点和输出节点采用的是Sigmoid型可微函数。BP网的算法过程首先是由输入层的各节点指向隐含层中各节点再由隐含层中的各节点指向输出层,这实现了信号的前向传播过程,然后是结果的优化是从输出端开始逐层向输入端计算的,因此叫做误差的反向传播过程。由于它能完成对任意非线性映射关系的一种逼进,所以此算法适用范围比较广,精度比较高,能够适用于并联机构的位置求解。具体运算过程如下:设有一个m层的神经网络,输出层为M,并在输入层加有样本X;设第k层的i神经元的输入总和表示为,输出;从第k-1层的第j个神经元到第k层的第i个神经元的权系数为wij各个神经元的激发函数为f,则各变量的关系可用下面有关数学式表示:

为了求解出来的权系数能使代价函数最小,采用最速解法一阶梯度法。这种方法寻优的重点是得出优化目标函数的一阶导数的最小值。即

的最小值。对M层有:

式中

M-1层有:

由上可以推出


综上得出BP网的算法如下:

依据上面求出权矩阵,神经网络的构造就完成了。
2 3-RRP并联机构位置正解描述
3自由度并联机构如图1所示,该并联机构能够实现两个方向上的平移运动和一个方向上的转动。机构由动平台、静平台和三个运动支链组成,三条支链完全相同都是由两个转动副和一个移动副组成,三个移动副与动平台相连。同时三条支链成对称分布,以三个转动副作为机构的输入。
图1中XOY是机构的定坐标系,是机构处于初始位置时动平台的坐标。xoy是固定在动平台上的动坐标,原点位于动平台的几何中心。各驱动杆ab的长度相等均为L,α1、α2、α3分别是三驱动连杆的输入角,连接杆bc的长度为H,滑动倒杆cd长度为C。所谓机构的位置正解就是在已知三个驱动角的角度后,通过带入机构正解方程计算出动平台中心o的位置坐标(x0,y0,θ0)。

图1 3-RRP并联机构的机构简图
3 实例计算及仿真结果
3-RRP并联机构在已知动平台位置量后便可以求出三个驱动的输入角度,求解过程相对位置正解来说比较简单。所以可以通过反解方程得到机构驱动的输入角度,然后利用该角度进行仿真,最后将神经网络仿真出来的结果与理论值进行比较判断该方法是否有效。
取L=150mm,H=120mm,C=100mm。利用位置反解求出的解,从中取出十组进行仿真。从仿真结果可以看出经过4275次迭代后达到了所设置的误差精度1e-3,结果如图2所示。

图2 误差曲线图
图中最上面的实线是训练曲线,下面的实线是目标曲线,可以看出随着迭代次数的增加,误差值也在随之减小,计算的精度随之提高。在经过4725此迭代后,训练误差成功降低为所设定的误差值1e-3这个范围内。理论值和实际值达到了拟合。同时也验证所建神经网络的正确性。仿真结构如表1所示。

表1 仿真结果

续表
4 结论
通过建立的BP神经网络可以实现从各连杆的工作空间到并联机构动平台工作空间的复杂非线性映射关系,大大简便了求解并联机构位置正解的难度。同时运用BP神经网络仿真后得到的位置正解的精度也能满足设定的精度要求。所以BP神经网络是一种简便复杂算法得到满足精度要求解的一种非常有效的算法工具。
[1]黄真.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[2]刘平安.柔性关节及3-DOF微动平面并联机器人设计与分析[D].北京:北京交通大学,2008.
[3]刘延斌,韩秀英.一种6-TPS并联机构位置正解的快速解法[J].机床与液压,2008,36(2):27-29.
[4]周结华,彭侠夫,仲训昱.基于改进型迭代神经网络的三自由度并联机构位置正解的分析[J].机床与液压,2012,4(11):32-35.
[5]陈学生,陈在礼,孔民秀,等.基于神经网络的6-SPS并联机器人正运动学精确求解[J].机器人,2004,26(4):314-319.
[6]YEE C S,LIM K B.Forward kinematics solution of stewart platform using neural networks[J].Neurocomputing,1997,16(3):333-349.
[7]Pratik J.Parikh,Sarah S.Lam.Solving the Forward Kinematics Probiem in Parallel Manipulators Using an Iterative Artificial Neural Network Strategy[J].Int J Adv Manuf technol.2009,40(5-6):595-606.
[8]杨斌,李瑞琴.基于BP法的3-RSR并联机器人的位置正解研究[J].组合机床与自动化加工技术,2013(12):8-10.
[9]张世辉,孔令富,原福永,等.基于自构形快速BP网络的并联机器人位置正解方法研究[J].机器人,2004,26(4):314-319.
[10]何晋,王立权,李芃.一种快速BP算法的并联机器人正运动学求解[J].制造业自动化,2003,25(10):34-36.
(编辑 赵蓉)
A Solution for Forward Kinematics of 3-RSR Parallel Robot Based on BP Algorithm
HAN Xiao,LI Hong,LI Rui-qin
(School of Mechanical Engineering and Automation,North University of China,Taiyuan 030051,China)
The solution for forward kinematics of the parallel mechanism is the basis of the parallel robot mechanism application and is one of the difficulties in research institutions kinematics.The commonly used method has two kinds of analytical method and numerical method,but these two solutions for some complex institution to solve the difficulty is more difficult,and the solution is not the only.BP neural network in the position of parallel mechanism is studied in the solution for forward kinematics,through the study of position inverse solution results and training,implementing handlers from joint variables space to work space of nonlinear mapping,and solving the3-RRP of kinematics solution of parallel mechanism.A set of simulation instance is given,it can be seen that the result calculated by the simulation of the effectiveness of the method and feasibility.
parallel robot;forward kinematics;BP neural network
TH132;TG659
A
1001-2265(2015)02-0094-03 DOI:10.13462/j.cnki.mmtamt.2015.02.026
2014-06-09;
2014-07-17
国家自然科学基金资助项目(51275486)
韩霄(1988—),女,河南南阳人,中北大学硕士研究生,研究方向为机构理论与机器人设计,(E-mail)675453312@qq.com。
猜你喜欢
现代电力(2022年2期)2022-05-23
中学生数理化·中考版(2021年10期)2021-11-22
河北省科学院学报(2020年1期)2020-05-25
电子制作(2019年19期)2019-11-23
重型机械(2019年3期)2019-08-27
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
燕山大学学报(2015年4期)2015-12-25
海军航空大学学报(2015年1期)2015-11-11
