空间遥感器的运动学支撑研究
2015-11-07 08:52张立浩
中国科技信息 2015年24期
张立浩
空间遥感器的运动学支撑研究
张立浩
为了消除在轨工作时空间遥感器支撑结构与光学系统的相互影响,本文对运动学支撑结构进行了研究。首先介绍了运动学支撑的基本设计原理,运动学支撑系统约束刚体六个自由度,并且通过自身变形来适应热载荷和重力方向变化的影响。然后对“3-2-1”形式运动学支撑、“2-2-2”形式运动学支撑和“Hexapod”运动学支撑的基本原理、自由度和应用情况进行了研究。三种支撑结构分别通过支撑结构的整体转动,柔性结构的变形以及球铰的转动来消除应力释放和热变形对空间遥感器的影响;从自由度分析可以得知,三种支撑结构下物体的自由度数均为零,都可实现完全约束;三种结构均可在空间遥感器上应用。
为了实现更高分辨率的空间观测,空间遥感器的尺寸和质量越来越大。在空间遥感器入轨后,重力卸载、应力释放、热变形等因素使光学系统与支撑结构之间的变形大于光学系统许用变形。因此,必须采取一种方法来隔离光学系统,避免其受到未知应力的影响。运动学支撑是一种静定的支撑结构,并且可以隔离光学系统与支撑结构之间的相互影响。
本文首先介绍了运动学支撑的基本设计原理,然后对“3-2-1”运动学支撑的基本原理、自由度和应用情况进行了研究,接着对“2-2-2”运动学支撑的基本原理、自由度和应用情况进行了研究,最后对“Hexapod”运动学支撑的基本原理、自由度和应用情况进行了研究。
1运动学支撑设计原理
运动学支撑是基于完全约束理论设计的。完全约束理论是指物体空间运动自由度和作用在物体上的约束之间是一一对应的关系,物体没有过约束和欠约束。传统Grübler Kutzbach 自由度计算公式为

式中: d 为机构自由度,n 为构件的数目,j 为铰链的数目,fi 为第 i 个铰链约束的自由度。
在空间中的刚体有六个自由度:沿三个正交轴的平移和绕三个轴的旋转。如果施加相同数量的约束使其空间自由度数为零,那么这个刚体的空间位置也就完全确定了,这是运动学支撑设计的基础。如果物体的某一个自由度被一个以上的约束方式限制住,那么物体内就会产生应力,发生变形。运动学支撑系统不限制超过六个刚体自由度。运动学支撑结构可以通过变形来适应热载荷和重力方向变化的影响,而不影响光学成像质量:采用运动学支撑的光学部件可以发生刚体运动而不是变形。运动学支撑方式不仅用于光学组件。它可用于所有敏感设备,如科学仪器。
运动学支撑的最简单的形式是通过一个点支撑刚体的所有6个方向运动。然而在实际工程应用中,很少采用一点来支撑光学元件,因为它会产生局部的应力集中。运动学支撑一般采用至少三个不同的点来约束物体。常见的运动学支撑形式有“3-2-1”式,“2-2-2”式,还有“Hexapod”式等。
“3-2-1”形式运动学支撑研究
基本原理
“3-2-1”式运动学支撑基本原理如图1所示。“3-2-1”支撑方式即“点-V形槽-平面”支撑方式。这里有一个假设,就是物体必须压在支撑结构上。图中由于物体本身的重力,可以使其正好压在支撑结构上。当没有重力时,可以通过设置弹簧来保证物体和支撑结构完全接触。
在A点的球铰约束物体的x,y,z三个方向的平动。在B点的V形槽约束物体y,z两个方向的平动。A和B共同约束了物体绕y轴和z轴的转动,而允许物体绕x轴转动。在C点的平面约束了物体垂直于xy平面的运动,即约束了物体绕x轴的转动。A、B、C三点分别约束了物体3个自由度,2个自由度,1个自由度,因此这种形式被称为“3-2-1”式。遥感器入轨后的重力卸载、应力释放、热变形产生的影响可以通过支撑结构的转动来消除。

图1 “3-2-1”运动学支撑原理图
自由度分析
通过对“3-2-1” 支撑形式的自由度分析,确定这种支撑形式完全约束了物体的六个自由度,既没有过约束,也没有欠约束。A点的球铰约束三个平动自由度,释放三个转动自由度。B点的V形槽,约束两个平动,两个转动自由度,释放沿着槽轴向的平动和绕着槽转动的自由度。C点的平面只约束垂直平面的平动,释放其他五个自由度。构件包括平台、支撑结构和被支撑物体,数目n为5个,铰链的数目j=3,A点约束的自由度为3,B点约束的自由度为2,C点约束的自由度为1。根据公式(1),即结构的自由度数为零,物体被完全约束。
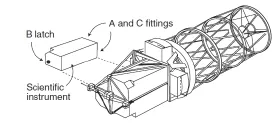
图2 HST科学仪器“3-2-1”运动学支撑
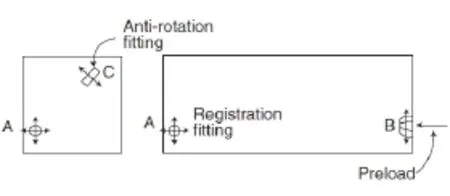
图3 HST科学仪器“3-2-1”运动学支撑原理图

图4 WFC3模块“3-2-1”运动学支撑模型
应用
Hubble天文望远镜的科学仪器支撑采用了“3-2-1”支撑方式,如图2、图3所示。A点是定位装置,B点是V形槽,同时在B点施加了预载荷,C点是限制转动装置。为了便于航天员在轨对科学仪器进行插入和锁紧,这个系统还设计了简单的引导机构。
Hubble望远镜的WFC3模块即采用了“3-2-1”支撑方式,如图4所示。建立了WFC3模块包含运动学支撑的有限元模型,A点约束x,y,z三个方向自由度,B点约束x方向自由度,C点约束x,y方向自由度。对WFC3模块进行发射状态的力学分析,动力学分析,温度变化的位移分析,在轨重力释放的位移分析,结果表明运动学支撑设计可满足设计指标要求。
“2-2-2”形式运动学支撑研究
基本原理
运动学支撑的另一种常见布置形式是3组切线布置的双脚架,即是“2-2-2”形式,如图5所示。在制冷系统中,支撑结构与组件收缩量差别很大时,3组双脚架仍能减小偏心误差。切向双脚架通常在支杆端部采用柔性结构,允许结构绕支撑点的转动,可以避免使用机械铰链。遥感器入轨后的重力卸载、应力释放、热变形产生的影响可以通过柔性结构的变形来消除。
物体平面内的移动自由度由三组双脚架的任意两组来限制,垂直平面的移动自由度由三组双脚架共同限制。平面内的转动自由度由三组双脚架的任意两组来限制,绕平面的转动自由度由三组双脚架共同限制。三组双脚架等效约束了刚体六个自由度,相当于每个双脚架各约束两个自由度,故称为“2-2-2”形式。

图5 “2-2-2” 运动学支撑原理图

图6 ISIM的“2-2-2”运动学支撑
自由度分析
通过对“2-2-2” 支撑形式的自由度分析,确定这种支撑形式完全约束了物体的六个自由度,既没有过约束,也没有欠约束。“2-2-2”支撑形式共3个支撑点,每个点都采用柔性铰链,约束垂直于平面的移动自由度,以及在平面内,与平面相切的移动自由度,释放其他四个自由度。构件包括平台、支撑结构和被支撑物体,数目n为5个,铰链的数目j=3,每个铰链约束的自由度数为2。根据公式(1),即结构的自由度数为零,物体被完全约束。
应用
JWST的模块支撑结构(ISIM)就是采用“2-2-2”支撑方式与望远镜主结构连接的,如图6所示。运动学支撑能够减小机械变形和热变形在ISIM与主结构之间的传递。由2组两足和2个单杆组成的运动学支撑结构,能够约束ISIM的6个基本刚体位移。每个支杆的顶端采用缩小轴径设计,实现减小柔性部位剪切和扭转刚度的目的,使其等效于使用铰链。
运动学支撑的设计,需满足以下几个要求:满足发射强度、基本刚度要求,对低温不敏感。ISIM结构的总质量1400kg,基频要求大于25Hz,在轨的温度变化0.5K,结构稳定性要求为200nm和120" 。需要通过对运动学支撑结构的设计,满足以上的所有需求。初步采用三个支撑点设计,再进行优化设计。运动学支撑的设计结果为两组双脚架和一组分开的双脚架,如图7所示。当温度发生变化时,由于杆长的不一致,每根杆的变形不一样,由于运动学支撑的作用,不会产生过约束变形,取而代之的是使得ISIM发生转动;同理,ISIM和OTE的变形不相同,也会使得ISIM发生转动。通过分析可知转角的变化满足设计要求。
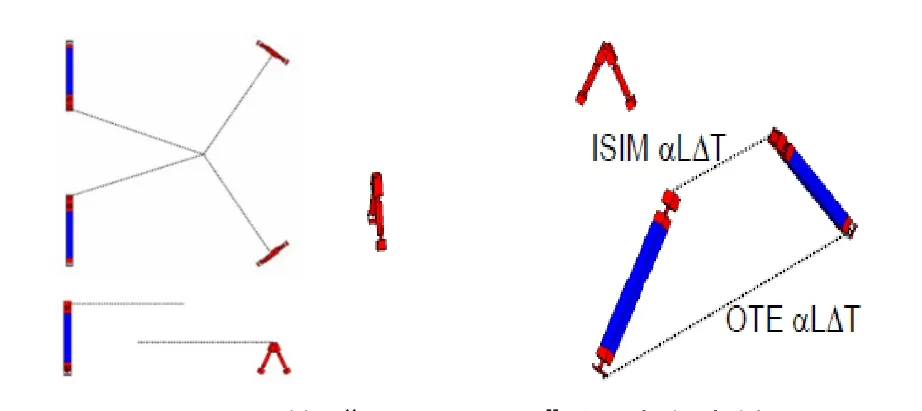
图7 ISIM的“2-2-2”运动学支撑原理

图8 “Hexapod”运动学支撑原理图
“Hexapod”形式运动学支撑研究
基本原理
“Hexapod”形式的运动学支撑一般为3点支撑,由六个首尾相连的支杆组成,如图8所示。12个连接点(每个支杆有两个)应该采用球铰或者柔性铰链,避免在调整杆长过程中对支撑结构产生过约束。“Hexapod”支撑形式的6个自由度之间不是正交的,当调整一个方向的自由度时,会影响到其它方向的自由度。遥感器入轨后的重力卸载、应力释放、热变形产生的影响可以通过支杆两端的球铰转动来消除。
光学组件三个方向的平动由三个连接点共同限制。平面内的转动自由度由三个连接点的任意两点来限制,绕平面的转动自由度由三个连接点共同限制。三个连接点等效约束了刚体六个自由度。
自由度分析
通过对“Hexapod” 支撑形式的自由度分析,确定这种支撑形式完全约束了物体的六个自由度,既没有过约束,也没有欠约束。“Hexapod”支撑形式共有6根杆,12个连接点。其中,6个点采用球铰支撑,释放3个转动自由度;6个点采用虎克铰,释放2个转动自由度。构件包括平台、支撑结构和被支撑物体,数目n为 20个,铰链的数目j=12,6个球铰点约束的自由度为3,6个虎克铰点约束的自由度为4。根据公式(1),即结构的自由度数为零,物体被完全约束。

图9 DGT和MMT“Hexapod”运动学支撑
应用
“Hexapod”形式的运动学支撑随着计算机控制的发展应用越来越广泛。这种支撑形式可以用来做镜子支撑,可以调节各个方向的位置,常见用于次镜的支撑。
这种支撑首先在飞行模拟器上应用,也被称作Stewart平台。每个支杆的长度可以通过线性促动器来调节。在自动化系统中可以通过促动器控制获得想要的运动结果。
德国DGT望远镜的主支撑结构采用了“Hexapod”支撑形式。MMT望远镜的次镜支撑与采用了“Hexapod”支撑形式,如图9所示。
结语
本文首先介绍了运动学支撑的基本设计原理,运动学支撑系统约束刚体六个自由度,并且通过自身变形来适应热载荷和重力方向变化的影响。然后对“3-2-1”形式运动学支撑、“2-2-2”形式运动学支撑和“Hexapod”运动学支撑的基本原理、自由度和应用情况进行了研究。应力释放和热变形对空间遥感器的影响,三种支撑结构分别通过支撑结构的整体转动,柔性结构的变形以及球铰的转动来消除。从自由度分析可以得知,三种支撑结构下物体的自由度数均为零,都可实现完全约束;三种结构均可在空间遥感器上应用。



10.3969/j.issn.1001-8972.2015.24.015
猜你喜欢
交通科技与管理(2022年9期)2022-05-24
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
北京航空航天大学学报(2017年1期)2017-11-24
制造技术与机床(2017年3期)2017-06-23
海军航空大学学报(2015年1期)2015-11-11
CHIP新电脑(2014年5期)2014-05-14