级间设计人机联合探月方案*
2015-11-07 08:52张亚坤李海阳
国防科技大学学报 2015年4期
张亚坤,李海阳
级间设计人机联合探月方案*
张亚坤,李海阳
(国防科技大学 航天科学与工程学院, 湖南 长沙 410073)
利用登月飞行器的级间组合设计方法对载人登月飞行器的构造进行设计,在级间方案的论证中分析了不同组装模式对运载火箭能力的需求,建立了航天员和机器人联合探测的载人登月方案。级间组合方法可为应转移飞行器和登月飞行器设计提供另一种思路,根据飞行器级间的不同组合方式对登月飞行器的质量规模进行了初步估算,并对比了不同飞行方案对运载火箭能力的需求,研究可为我国首次载人登月任务方案提供参考。
载人登月;人机联合;登月飞行器;质量估计;飞行方案
(CollegeofAerospaceScienceandEngineering,NationalUniversityofDefenseTechnology,Changsha410073,China)
自从阿波罗计划之后,探月活动陷入短暂的低潮期,但是人类并未停止对月球的探测,美国探测月球的方式也从“冷战”期间的不惜代价转变为更加实用、经济、可靠的方式[1-2]。目前,世界各航天大国也相继准备开展无人和载人探月任务,研究月球的重点基本放在如何开发和利用月球资源上,包括月面环境勘测、月球重力梯度测量、月球资源探测开采和月球为基站或者中转站实现载人登陆火星或者其他小行星[3-6]。这种全面和深入的探测需求给月球探测技术提出了更高的要求,这种广泛的探测现状也给我国月球探测计划提出了更多的挑战,因此,嫦娥工程无人探月之后我国开展载人登月任务也势在必行。
实施载人登月任务,对我国航天事业的发展有着重要的意义。航天员对月面环境的近距离观察和对月球样品的采集,能够获取更多有关月球的信息,这是非载人探测所无法比拟的。然而,为确保航天员在月面任务过程中的安全,其出舱时间和移动范围在一定程度上受到了限制,因此,有待开发一种既能完成既定载人探月任务又能够保证航天员安全性的探测模式。美国在“阿波罗任务”计划执行过程中逐步认识到的一条经验就是携带能辅助航天员进行特定操作任务的机器人在载人登月任务中很有必要。月球车的加入使阿波罗15号中的航天员探测范围显著提高[7],美国“星座计划”也将机器人协同航天员探月作为其核心内容之一[8]。在实施月面任务过程中,机器人协助航天员完成容易造成航天员疲劳、对航天员来说危险系数较高和其不能单独胜任的任务,可大大减轻航天员的负担。此外,载人探月任务规模十分庞大,月面任务规模的增加必然带来地面发射载荷成倍的增加。我国首次载人登月探月活动属于有限规模的任务范畴,这就要求载人探月任务既要提高月面任务效率,又要尽可能地降低月面载荷。本文从这个角度分析,对1名宇航员搭配1名机器人的搭配方式来完成我国首次载人探月任务的方案进行了研究。
人机联合探月方案中采用机器人代替航天员的方式完成载人登月任务,其优势在于:其一,不需要为机器人准备食物、宇航服和保障用品,这可以降低载人飞船的负荷,从而达到节省燃料的目的,并在一定程度上降低了对发射火箭的要求;其二,空间机器人技术是21世纪最重要的技术之一,实施机器人到月面执行任务对我国发展机器人技术能起到技术牵引作用;其三,各国对采用机器人进行深空探测兴趣越来越浓,对人机联合探测技术的需求也越显迫切。根据航天员与机器人本身的功能特性进行合理的任务分配,充分发挥航天员与机器人各自的优势,可使载人探月任务更加效率化,从而达到减轻地面发射载荷负担。
国外对人机联合探月的研究开展较早,美国国家航空航天局(NationalAeronauticsandSpaceAdministration,NASA)提出发射类人机器人到月球表面,机器人在航天员登月之前预先完成一系列任务,从而提高载人登月航天人员执行任务的效率[9]。Mishkin对深空探测任务中的航天员和机器人的操作任务进行了研究,分析了机器人辅助航天员完成探月、探火星的必要性[10]。Neerincx等基于任务的需求提出了载人登月和登火星的“机组任务执行助理”系统理论,针对具体任务建立了航天员在回路中的仿真,并从任务有效性、效率、满意度等方面对人机操作进行了评价[11]。国内对人机联合探月的研究还处于起步阶段,还未形成系统的人机联合探月的概念,李海阳等对航天员与类人机器人月面联合探测的概念进行了初步研究[12]。除此之外,未见有关于人机联合探月关键技术的研究成果公开发表。
1 人机联合探月任务场景设计
对于我国首次载人登月而言,必然是先进行有限规模的月球探测,在此基础上再进行以建立月球基地为目标的大规模月球探测任务,参考阿波罗登月任务,我国首次载人登月任务可细化为以下几点:
1)载人登月并安全返回;
2)采集月面岩石样品并带回地球;
3)月面实验和仪器安装;
4)人机联合探月技术研究。
我国开展首次载人登月任务,必须在保证完成既定任务的同时又要尽可能缩小规模,基于以上考虑,拟采用1名航天员和1个机器人作为主体来完成我国的首次载人登月任务,详细场景设计如表1所示。人机联合探月场景的设计参数主要包括登月主体及数目、登月地点、载人登月总时间、月面任务时间、月面任务、航天员出舱次数和出舱时间等。

表1 人机联合探月场景
2 登月飞行器级间组合设计
2.1 登月飞行器组成
以阿波罗登月飞行器为例,其由载人飞船系统和登月飞船系统组成。载人飞船通常包含载人部分和服务舱部分,以阿波罗载人飞船为例,其由指令舱和服务舱两部分组成。登月飞船通常包括下降级、上升级两部分,阿波罗登月飞船上升级由登月舱和推进系统组成,登月舱可为执行月面任务的航天员提供一个休息调整的临时避难所,推进部分的主要功能是在月面任务结束后将上升级和有效载荷发送至环月轨道,并与等待在环月轨道的指令舱进行交会对接;下降级包括提供支架和推进剂部分。阿波罗登月飞行器概念模型[7]如图1所示。
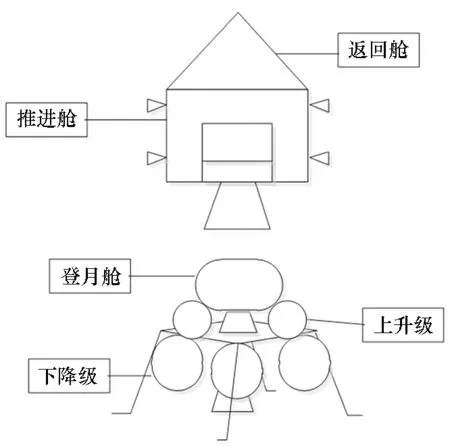
图1 登月飞行器概念模型Fig.1 Conception model of lunar spacecraft
我国的载人登月飞行器系统可参照阿波罗载人登月飞行器进行设计,即整个登月飞行器由载人飞船系统、登月飞船系统和推进系统组成。载人飞船可参照阿波罗飞船的两舱构型或者继承我国神舟飞船的三舱构型,本文的研究假设我国的登月飞船是将我国神舟载人飞船的轨道舱和返回舱合并成一个整体,推进舱保持不变的两舱构型,其中轨道舱和载人舱合并后称为载人舱。登月飞船由上升级、下降级两部分组成,其中上升级包含登月舱。
2.2 登月飞行器级间组合
登月飞行器完成载人登月任务过程中需要推进级完成若干次轨道机动。为降低整个任务的载荷和提高载荷效率,在登月过程中,登月飞行器的某些部件在完成既定任务后即被抛掉,从而使剩余推进剂可以更高效地完成余下任务。以阿波罗登月任务为例,登月飞船下降级完成月面任务后留在月面、上升级将航天员和月面采集样品送至指令舱后留在环月轨道、服务舱进入地月转移轨道后与指令舱分离。在保证整个任务顺利实施的前提下,使推进系统效率最大化是登月飞行级间组合设计的目的,通常包括推进系统数量和推进系统组合方式。
采取级间设计方法对登月飞行器的推进级构造进行设计,根据人机联合探月的任务需求将登月飞行器的级间组合可分以下几种方案[13],如图2所示。
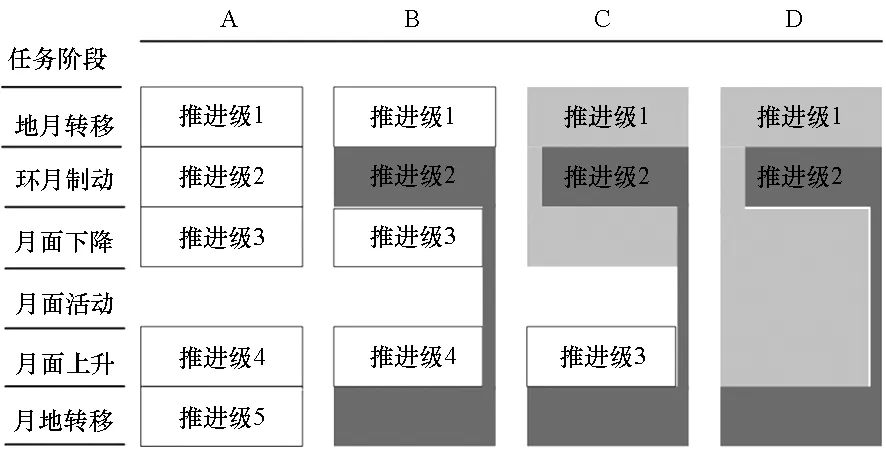
图2 登月飞行器级间组合方案Fig.2 Staging options of lunar spacecraft
在A方案中,载人登月飞行过程的各主要机动阶段的推进级部分是完全独立的,即每个轨道机动环节都配备一套独立的推进系统。该种方案为登月飞行器和载人登月的组装方案提供了较大的冗余性,从而使登月任务的飞行方案更加灵活,飞行器的组装可以经过多次轨道交会对接来完成。飞行方案灵活性的提高固然重要,然而推进级数量的增加必然会带来推进系统总体规模的增大,此外,增加交会对接次数也必然会提高任务的复杂性,这会使整体任务载荷规模和风险系数变大,所以该种级间组合方案多处于理论研究阶段。
B方案与阿波罗登月飞行器方案相似[7]。推进级1将整个登月飞行器加速至地月转移轨道。与A方案不同的是,B方案将A中的推进级2和推进级5合并为一个整体,并将合并后的推进级2安装在载人飞船中,用来完成环月制动和月地转移阶段的轨道机动。登月飞船包含推进级3和推进级4两部分,分别安装在登月飞船的下降级和上升级,推进级3完成登月飞船下降段的轨道机动,月面任务完成后推进级4将月面上升级发送至环月轨道与载人飞船交会对接。推进级2完成登月飞行器制动后留在环月轨道,与上升级交会对接后将载人舱发送至月地转移轨道。该种方案较A方案降低了对推进系统的数量要求,此外,将登月飞船分为上升级和下降级可以有效降低月面上升总体载荷。
C方案是美国“星座计划”提出的登月飞行器构造方案[8]。该方案大体与阿波罗方案相似,唯一不同的地方在于该方案中登月飞船的下降级承担了将整个登月飞行器发送至地月转移轨道的任务。采用登月飞行器来完成登月飞行器的地月转移轨道机动无疑会大大增加整个登月飞行器的整体质量规模,对运载火箭的能力也提出了更高的要求,此外,登月飞船需要较大质量的高比冲低温推进剂,这对低温推进技术也提出了更高的要求。然而,采用该种方案的优势也是显而易见的,一方面降低了推进级系统的数量,另一方面增加了登月飞行器组装的灵活性,即可以通过多次运载火箭来完成。
D方案与B方案类似,不同的部分在于登月飞船不分上升级和下降级而是由一个整体构成。登月飞船完成月面任务后返回环月轨道,登月飞船的下降和上升段的动力皆由推进级1提供。该种方案在C方案的基础上再次减少了推进系统的数量,这在一定程度上可以降低登月飞行器推进系统的复杂程度,但是同样面临大质量、高比冲低温推进剂的工程技术难题,此外,登月飞船的采用一个推进系统的方案是否优于登月飞船上升级和下降级都装有一套推进系统的方案还有待论证。
登月飞行器级间组合设计需要统筹考虑登月飞行器的质量规模和我国已有的载人飞船的技术基础,同时要兼顾我国载人登月飞行方案,是需要在概念设计阶段重点考虑的环节。
3 质量规模需求分析
3.1 登月飞行器质量估算流程
按照NASA提出的质量规模估计方法[13],登月飞行器的质量规模估计要遵循以下几个步骤。
3.1.1 加压舱体积估计
所谓加压舱即通过加压、加氧等手段建立的密封舱。在奔月和返回地球阶段,载人飞船加压舱可供航天员生活和休息,在月面活动期间,航天员通过登月飞船加压舱进出休息室。加压舱在数量上并不等于航天员工作生活空间的体积,还包括航天员日常生活供给和设备的体积。加压舱的体积会随着航天任务的时间和航天员的数量的增加而增大,大致符合如图3所示的曲线规律[13]。
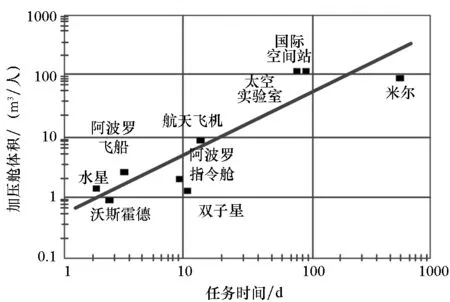
图3 加压舱体积与任务天数的参考案例Fig.3 Pressurized volume versus mission duration with historical reference cases
3.1.2 登月飞船质量估计
登月飞船加压舱为航天员在月面活动期间和月球上升下降段提供工作休息场所。基于载人登月任务要求和功能分析,登月飞船的上升级主要包括登月舱部分和推进系统部分。登月舱不但包含舱体机构等结构组成部分,还包括供航天员日常生活和出舱的生保用品、登月服、导航制导与控制系统、通信系统、电源系统、交会对接机构等;推进系统除了推进剂部分外还包括推进系统支持结构、热防护系统等。
根据1994年NASA总结出的飞行器加压舱质量经验公式[13],登月飞行器的加压舱质量可由式(1)进行估算。加压舱质量决定因素包括member(机组人数)、day(任务时间)、volume(加压舱容积)。
mbo=592×(member×day×volume)0.346
(1)
式(1)计算得到的结果是加压舱的干重,其并未考虑登月飞行器系统其他部分如对接机构、太阳能帆板、通信系统等质量。此外,登月飞行器的质量估计属于概念设计阶段的初步估计,随着登月飞行器概念设计的逐步深入、载人登月任务和结构功能的更加明确,登月飞行器的总体质量规模较前期会有所增加。按照美国NASA的经验指标,登月舱从飞行器的概念设计到应用阶段质量有25%的增长量[14]。
在得到登月舱干重后,登月飞船上升级可通过式(2)来计算。
(2)

同理,可对登月飞行器下降级的质量进行估算。基于载人登月任务要求和功能分析,登月飞船下降级主要包括架体机构、推进系统、电源系统以及部分月球科学仪器设备。根据式(2)计算得到的登月飞船上升级的质量,可用式(3)对登月飞船的质量进行估算。
(3)

3.1.3 载人飞船质量估计
根据载人登月任务的需要,载人飞船加压舱主要供航天员在地月往返段工作休息,载人飞船的质量同样可利用齐奥尔科夫斯基公式来进行估算,按照美国NASA的经验指标,阿波罗指令舱的最终质量较概念设计阶段增长率为50%[13],因此本文载人飞船载人舱的质量估计也设置50%的冗余量。
根据式(1)对载人飞船载人舱的体积进行估计,在此基础上可根据质量估算公式对载人舱质量进行估计:
(4)
其中: mCM表示利用公式估算载人飞船加压舱的干重;mCM1表示考虑质量增长率后加压舱重量;mCMp表示加压舱推进剂质量;mCMps表示推进剂结构支持系统质量;mCMp1表示重新估计的推进剂质量;mCM2表示载人飞船最终质量;s6表示载人飞船从概念设计阶段到最后产品阶段的质量增长率;s7表示推进系统所占推进剂质量的比例,一般取15%;s8表示载人飞船推进剂冗余比重。
3.1.4 环月制动级和地月转移级质量估计
根据载人登月任务的需要,环月制动级提供动力使载人飞船和登月飞船进入环月轨道,地月转移级将提供动力使载人飞船和登月飞船进入地月转移轨道。环月制动级和地月转移级质量的估计也按照齐奥尔科夫斯基公式进行计算。
3.2 登月飞行器质量估算
完成整个载人登月任务需要登月飞行器进行多次轨道机动,推进剂系统占登月飞行器总体质量的比例很大,推进剂质量可依据转移速度增量进行估计。此外,推进剂也要根据我国的推进技术水平来选择,考虑到低温推进剂的挥发性、不宜长时间储存,所以只在地月转移轨道机动段使用液氢/液氧推进剂,其推进剂比冲取4400m/s,其他阶段的机动采用更易于长时间储存的常规推进剂,推进剂比冲取2800m/s,如表2所示。
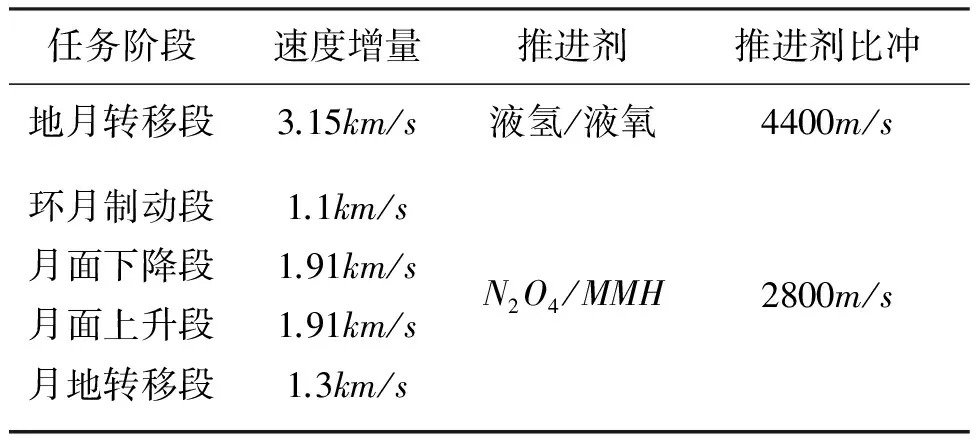
表2 载人登月任务阶段速度增量及推进剂
按照NASA提出的质量估计方法,首先,对载人飞船和登月飞船加压舱体积进行估算,航天员在载人飞船加压舱中的时间大约为8~10天,在登月舱时间为1~2天,根据图3可初步估算出载人飞船可供航天员活动的加压舱体积Vs为1.2m3、登月飞船供航天员活动的加压舱体积Vl为6m3。以阿波罗飞船为例,登月舱总体积为6.7m3,其中,可供航天员使用的空间体积为4.5m3(即每名航天员平均可支配体积为2.25m3),系统设备和日常生活用品所占体积为2.2m3;载人飞船加压舱系统设备和日常生活用品所占的体积空间为3m3,根据以上参考数据可初步估算我国载人飞船加压舱和登月舱的体积。
载人飞船加压舱体积Vms为:
Vms=V1+V2=3+6=9m3
(5)
式中:V1代表设备空间体积;V2为航天员生活空间体积。
登月飞船加压舱Vml为:
Vml=V4+V5+V6=2.2+1.2+1=4.4m3
(6)
式中:V4为设备空间所占体积;V5为登月舱生活空间体积;V6为机器人及其支持系统所占体积。
在此基础上,可按照式(1)、式(2)对登月飞船上升级和下降级的质量进行估算。推进剂支持系统不但包括推进剂本身,还包括推进剂发动机和其他一些推进支持机构,这些结构一般占总推进剂总质量的15%[15],在计算飞船重量的时候,需要将这部分质量考虑在内。假设推进剂冗余量取值10%,上行载荷为100kg,下行载荷为500kg,则登月飞船的质量如表3所示。
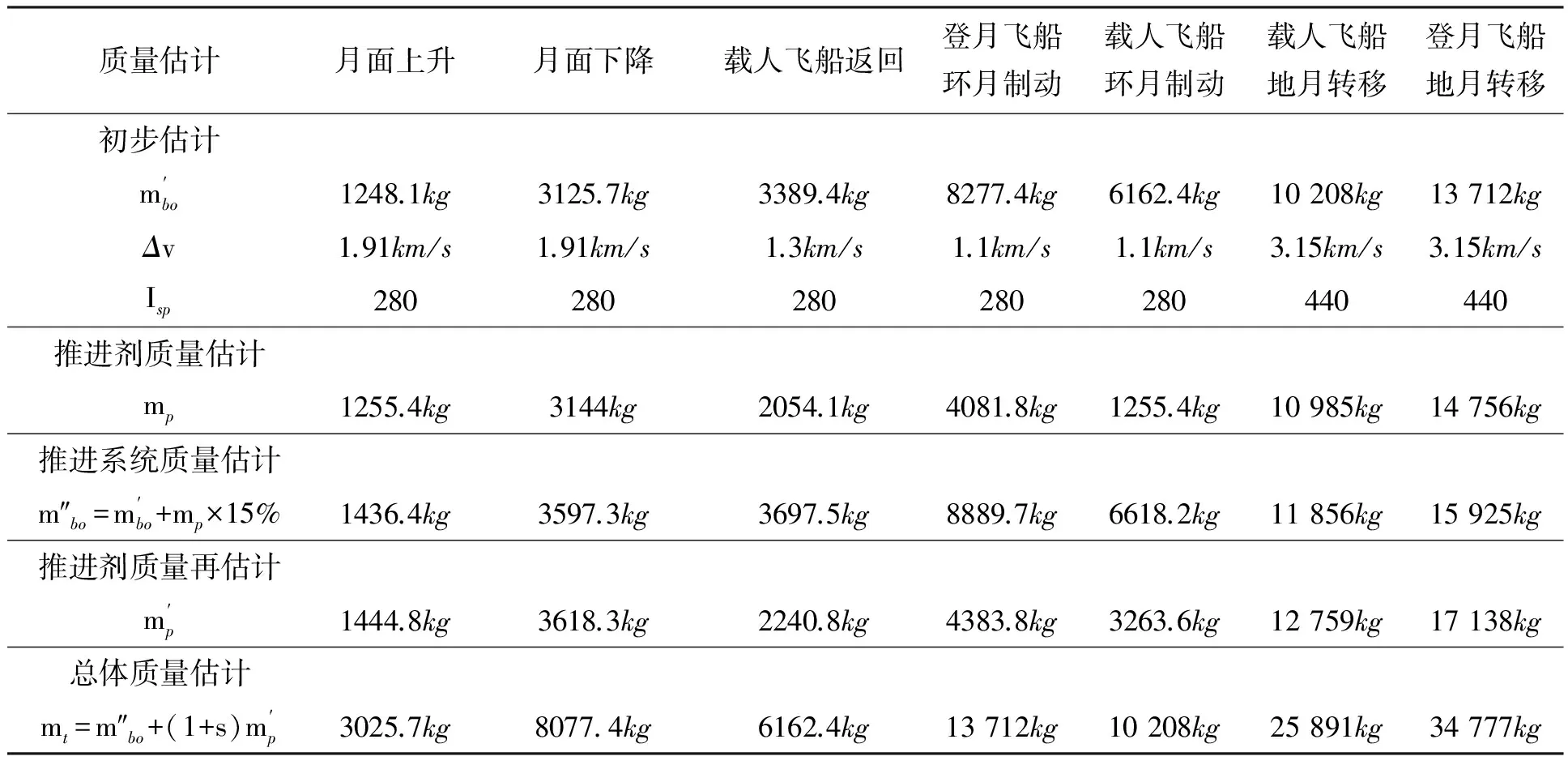
表3 登月飞船质量估算
3.3 火箭运载能力需求
从表3中可以看出,要完成1人1机、月面活动1天的载人登月任务至少需要运载火箭具备70t级的近地轨道运输能力,如果登月飞行器在环月轨道完成组装,则至少需要运载火箭具备10t级的载人火箭运载能力和14t级的货运火箭运载能力。
4 飞行方案研究
载人登月飞行方案的确定需要综合考虑运载火箭的能力、载人登月任务、任务测控条件、登月飞行器构造等约束,是载人登月计划中最为关键的一环。目前,载人登月飞行方案的分类多以是否需要进行近地交会对接和环月交会对接来完成登月任务进行分类[14],在此基础上,有些学者根据近地和环月交会对接次数来对登月飞行方案进行分类[15-16],也有一些学者结合我国火箭发射能力来对我国的载人登月飞行模式进行研究[17]。
本文根据登月飞行器组装方式的不同来对飞行方案进行研究,文中假设登月飞行器组装完成后所采用的飞行方案与阿波罗相同,主要包括:地面组装方案、近地轨道交会对接组装、环月轨道对接组装,下面分别对几种方案进行分析。
4.1 地面组装方案
登月飞行器地面组装方案与美国阿波罗登月计划方案相同,登月飞行器的组装在地面完成后由重型运载火箭一次性地将其发送至近地轨道。经过短暂的调整后由地月转移级提供动力将登月飞行器组合体发送至奔月轨道,途中经过数次奔月轨道修正,环月制动级减速调整使登月飞行器进入环月轨道,之后登月飞船与载人飞船分离并着陆月面,月面任务完成后上升级进入环月轨道并与载人飞船交会对接,下降级留在月面。航天员由上升级进入载人飞船后,载人飞船载人舱加速进入月地转移轨道。地面组装载人登月方案过程如图4所示。
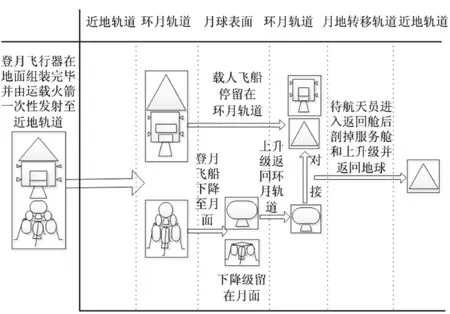
图4 地面组装方案Fig.4 Ground composing mode
美国为阿波罗计划研制了大推力三级土星V运载火箭,火箭起飞质量大约2950t,近地运载能力达到120t,可满足阿波罗三人乘组、两人登月、月面任务持续3天的任务需求。根据上一节对登月飞行器质量规模分析可知,如果采用地面组装方案完成1名航天员和1个机器人、月面任务1天的任务需要我国研制至少具备70t级运输能力的运载火箭。
采用地面组装登月飞行器方案使载人登月任务的流程简单明了,登月飞行器组装完成后,仅用一枚重型运载火箭即可直接将其发送至奔月轨道,降低了对发射场连续工作的要求,避免了协调多次交会对接带来的窗口选择问题。但是,本方案的实施对重型火箭的依赖性较大,同时,重型运载火箭的研制需要兼顾考虑载人状态和载货状态,这无疑又加大了研制难度,会使研制周期相对来说更长、研制费用投入更大,经济和进度实现性较差。
4.2 近地组装方案
近地交会对接组装方案的实现途径为:采用运载火箭和载人运载火箭分别将登月飞船系统和载人飞船系统分批次送至近地轨道,并在近地轨道通过交会对接完成登月飞行器的组装任务,组装完成后地月转移级提供动力将登月飞行器送入奔月轨道,之后的任务程序与地面组装方案相同。近地交会对接组装方案可通过数次发射来完成,本文只讨论近地一次交会对接组装载人登月方案,即采用一枚重型运载火箭和一枚载人运载火箭分别将登月飞船和载人飞船发送至近地轨道,通过交会对接完成登月飞行器的组装。美国“星座计划”就是以“人货分运”为原则,采用近地交会对接的组装方案,方案流程如图5所示。
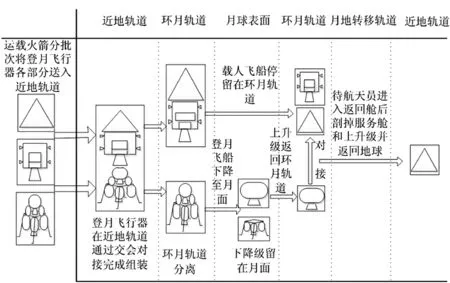
图5 近地组装方案Fig.5 Earth orbit composing mode
根据上一节登月飞行器质量规模分析可知,如果采用近地一次交会对接组装方案,我国需要研制至少具备60t级运输能力的货运火箭和至少具备10t级近地运输能力的载人火箭,才能确保本种方案的实施。
近地交会对接组装方案采用“人货分运”的方式,是近些年各国载人登月的主要论证方案[8,18],相比于重型运载火箭“人货合运”的方案,“人货分运”降低了对发射场连续发射能力的要求,这在一定程度上可以提高任务的灵活性和安全性。然而,采用一次近地交会对接组装的方案同样对重型运载火箭依赖性较大,研制周期较长,增加近地交会对接次数,任务复杂性也会相应变大。
4.3 环月组装方案
基于环月轨道交会对接组装的方案是将载人飞船和月面着陆器直接发送至环月轨道,并通过环月轨道交会对接完成登月飞行器的组装。该种飞行方案也可按照环月交会次数进行细分,本文只讨论一次环月组装的方案,即采用1枚货运火箭和1枚载人运载火箭直接将登月飞船和载人飞船发射至地月转移轨道,进入环月轨道后完成登月飞行器组装,环月轨道交会对接组装方案流程如图6所示。
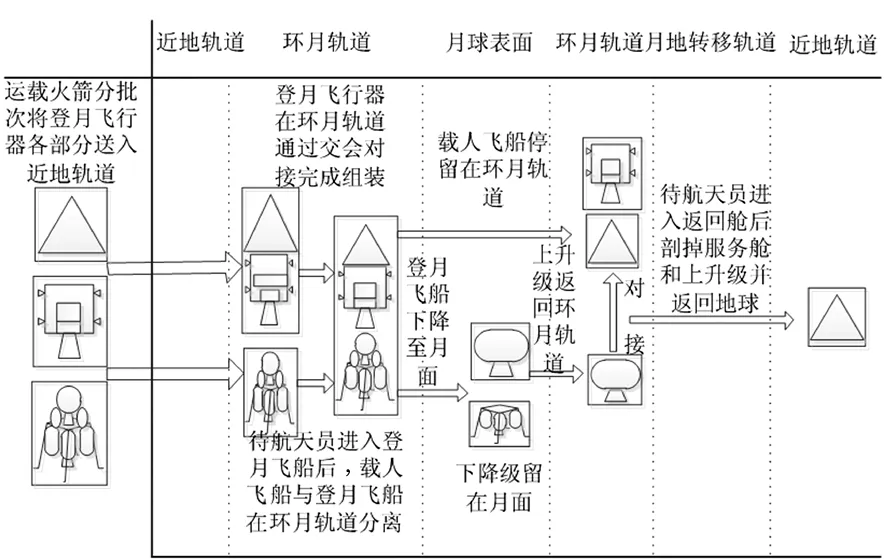
图6 环月组装方案Fig.6 Lunar orbit composing mode
根据上一节登月飞行器质量规模分析可知,如果采用环月轨道交会对接组装方案,需要研制至少具备25t级环月轨道运输能力的货运火箭和至少具备10t级环月运输能力的载人火箭,才能确保本种方案的实施。
采用环月交会对接的方式完成登月飞行器的组装为我国载人登月飞行方案提供了另外一种思路,从交会对接过程所需能量的角度来看,环月交会对接较近地交会对接要更节省能量。但是,环月交会对接较近地交会对接所需的条件也更加苛刻,受到深空测控网、我国环月交会技术等条件的约束,该种方案对我国的载人运载火箭也提出了较高的要求。
4.4 登月方案建议
通过以上几种方案比较可知,不同的组装方案都有各自的缺点和优点,其中,火箭的运载能力是制约实施我国载人登月的关键因素。对于我国来讲,火箭运载能力不足的情况下,可考虑多次发射、多次对接的有限规模载人登月。无论采取哪种方案,都需要对方案的可靠性、风险、成本等方面进行考量,建立符合我国当前国情的载人登月方案的评价指标,筛选出最优的登月方案。
5 结论
在参考载人登月任务的基础上提出了采用1名航天员和1个机器人的联合探月方案。根据载人登月任务需求对人机联合探月场景进行了设计,包括任务时间、出舱次数和月面载荷等设计指标;对登月飞行器的级间构造进行了分析,并在此基础上对登月飞行器的质量规模进行了估算;分析了该方案在不同组装模式下对火箭的运载能力需求。
文中对登月飞行器的质量规模估算属于概念研究阶段,随着登月飞行器设计的逐步深入、载人登月任务的更加明确,并且考虑到登月飞行器的冗余性设计,登月飞行器总体质量规模必然较概念设计阶段有所增加,完成人机联合探月任务就需要更大的火箭运载能力。此外,为完成继有限规模登月任务之后的大规模载人登月任务,研制更大负载能力的重型运载火箭与载人运载火箭势在必行。
References)
[1] 郑伟, 许厚泽, 钟敏,等. 月球探测计划研究进展[J]. 地球物理学进展, 2012, 27(6): 2296-2307.
ZHENGWei,XUHouze,ZHONGMin,etal.Progressininternationallunarexplorationprograms[J].ProgressinGeophysics, 2012, 27(6): 2296-2307.(inChinese)
[2] 韩鸿硕, 蒋宇平. 各国登月计划及载人登月的目的与可行性简析(上)[J]. 中国航天, 2008, 9: 30-33.
HANHongshuo,JIANGYuping.Thepurposeandfeasibilityanalysisofvariouscountries’lunarlandingplan(up)[J].AerospaceChina, 2008, 9: 30-33.(inChinese)
[3] 韩鸿硕, 蒋宇平. 各国登月计划及载人登月的目的与可行性简析(下)[J]. 中国航天, 2008, 11:41-44.
HANHongshuo,JIANGYuping.Thepurposeandfeasibilityanalysisofvariouscountries’lunarlandingplan(down)[J].AerospaceChina, 2008, 11:41-44.(inChinese)
[4] 龙乐豪. 关于中国载人登月工程若干问题的思考[J]. 导弹与航天运载技术, 2010, 6:1-5.LONGLehao.OnissueofChinamannedlunarexploration[J].MissilesandSpaceVehicles, 2010, 6:1-5.(inChinese)
[5] 欧阳自远. 月球探测进展与我国的探月行动(上)[J]. 自然杂志, 2005, 27(4):187-190.
OUYANGZiyuan.Progressininternationallunarexplorationprogramsandourcountry’slunaractivities(up)[J].ChineseJournalofNature, 2005, 27(4):187-190. (inChinese)
[6] 欧阳自远. 月球探测进展与我国的探月行动(下)[J]. 自然杂志, 2005, 27(5):253-257.
OUYANGZiyuan.Progressininternationallunarexplorationprogramsandourcountry’slunaractivities(down)[J].ChineseJournalofNature, 2005, 27(5):253-257.(inChinese)
[7]LyndonB.Apolloprogramsummaryreport[R].NASAReport, 1975.
[8]ConnollyJF.ConstellationProgramOverview[R].NASAReport, 2006.
[9]MishkinA,LeeY,KorthD.Human-roboticmissiontothemoonandmars:operationsdesignimplications[C]//ProceedingsofIEEEAerospaceConference, 2007.
[10]NationalAeronauticsandSpaceAdministration.Landingahumanoidrobotonthemoonina1000days“ProjectM”[R].NASAReport, 2010.
[11]NeerincxMA,LindenbergJ,SmetsNJJM,etal.Olmedo-soler.themissionexecutioncrewassistant:improvinghuman-machineteamresilienceforlongdurationmissions[C]//Proceedingsof59thInternationalAstronauticalCongress, 2008.
[12] 李海阳, 张波,黄海兵. 航天员与类人机器人月面联合探测概念初步研究[J]. 载人航天, 2014, 20(4): 301-306.
LIHaiyang,ZHANGBo,HUANGHaibing.Pilotresearchonconceptofintegrationlunarexplorationofcosmonautandhumanoidrobot[J].MannedSpaceflight, 2014, 20(4): 301-306.(inChinese)
[13]LarsonWJ,PrankeLK.Humanspaceflight:missionanalysisanddesign[M].USA:theMcGraw-HillCompanies, 1999.
[14]NASA’sexplorationsystemsarchitecturestudy[R].NASAFinalReport,TM-2005-214062, 2005.
[15] 彭祺擘, 李帧, 李海阳. 载人登月飞行方案研究[J]. 上海航天, 2012,29(5):14-19.
PENGQibo,LIZhen,LIHaiyang.Analysisonmannedlunarmissionflightmode[J].AerospaceShangHai, 2012, 29(5): 14-19.(inChinese)
[16] 盛英华, 张晓东, 梁建国,等. 载人登月飞行模式研究[J]. 宇航学报, 2009, 30(1): 1-7.
SHENGYinghua,ZHANGXiaodong,LIANGJianguo,etal.Astudyofthehumanlunarexplorationmissionmodes[J].JournalofAstronautics, 2009, 30(1): 1-7.(inChinese)
[17] 龙乐豪, 容易. 现代“嫦娥奔月”的技术途径设想[J]. 导弹与航天运载技术, 2008,1:1-7.
LONGLehao,RongYi.Researchonthetechnicalapproachofmannedlunarmission[J].MissileandSpaceVehicle, 2008, 1:1-7.(inChinese)
[18] 吴小宁, 刘斌. 俄罗斯2006—2030年载人航天发展规划[J]. 导弹与航天运载技术, 2007, 2: 18-23.
WUXiaoning,LIUBin.Russiamannedspacedevelopmentprogramfortheperiodof2006—2030[J].MissileandSpaceVehicle, 2007, 2:18-23.(inChinese)
Manned lunar exploration of human-machine combination based on staging method
ZHANG Yakun, LI Haiyang
Theconstructionmodeofmannedlunarspacecraftwasdesignedbyusingtheclassicstagingcombinationdesignmethodoflunarspacecraft.Apreliminaryestimationoftherocketcarryingcapacitywasmadeaccordingtotheanalysisofthedifferentstagingmethods,andtheexplorationschemesofhuman-machinesynergyareobtainedaswell.Thestagingmethodcanprovideanewsolutiontoorbittransfervehicleandlandingcraftdesign.Themassestimationoflunarcraftbasedontheanalysisofdifferentstagingoptionswasgiven,andthecorrespondingrocketcarryingcapacityofdifferentflightmodeswascompared.Thestudycanprovidereferencetotheschemeofourcountry’sfirstmannedlunarmission.
mannedlunarmission;human-machinecombination;lunarspacecraft;massestimation;flightmode
2015-01-15
国家自然科学基金资助项目(11472301);国家973计划资助项目(2013CB733100)作者简介:张亚坤(1987—),男,河北饶阳人,博士研究生,E-mail:zhangyakun_13@163.com;李海阳(通信作者),男,教授,博士,博士生导师,E-mail:lihaiyang@nudt.edu.cn
10.11887/j.cn.201504024
http://journal.nudt.edu.cn
V
A
猜你喜欢
军事文摘(2022年14期)2022-08-26
军事文摘(2022年8期)2022-05-25
智慧少年·故事叮当(2021年3期)2021-06-29
军事文摘(2020年24期)2020-02-06
小哥白尼(趣味科学)(2019年10期)2020-01-18
军事文摘(2019年18期)2019-09-25
军事文摘(2019年18期)2019-09-25
当代水产(2019年1期)2019-05-16
科学与财富(2019年3期)2019-02-28
太空探索(2016年9期)2016-07-12