无人驾驶轮式车辆电控气压制动技术研究
2015-11-21 09:39朱敏陈慧岩熊光明
兵工学报 2015年11期
朱敏,陈慧岩,熊光明
(北京理工大学机械与车辆学院,北京100081)
无人驾驶轮式车辆电控气压制动技术研究
朱敏,陈慧岩,熊光明
(北京理工大学机械与车辆学院,北京100081)
以有人驾驶4×4轻型战术轮式车辆为基础,开展无人驾驶电控制动技术研究。针对原车气压制动的结构和特点,设计一种电控气压制动系统,实现该车无人驾驶模式电控制动功能的同时,保留人工驾驶模式人工制动功能,且两种模式能够灵活切换。通过实车试验辨识电磁阀控制特性、不同路面车辆滚动阻力系数、电控制动车辆减速度与车速及控制输入的关系,并与无人车辆其他模块联调,为后续无人车辆控制策略的制定提供试验依据和理论支撑。试验结果表明:所开发的电控气压制动系统能够快速、精确地响应制动请求,人工行车制动与电控行车制动切换灵活、过渡平稳,可广泛应用于其他使用气压制动系统的商用车辆,以实现无人驾驶或辅助驾驶功能。
兵器科学与技术;轮式车辆;无人驾驶;电控气压制动;实车试验
0 引言
依据有人驾驶轮式车辆基础,开展无人驾驶相关技术研究,对发展高机动地面无人平台具有重要的战略意义。而电控制动作为此类无人车辆(后文无人车辆均指此类无人驾驶轮式车辆)核心技术之一,是实现无人驾驶智能行为的前提和基础。
对于采用液压制动的乘用车辆,现有有人驾驶车辆电控辅助制动系统发展较为成熟,有多种类型的装置得以应用,如电子真空助力器[1-2]、电控液压辅助制动装置[3]等。德国博世公司2013年6月推出的智能化助力器iBooster[4-5],通过电动机实现电控制动,方便后续乘用车辆新能源技术、主动安全及自动驾驶技术相关研究。而对于采用气压制动的商用车辆,Karthikeyan等在试验台架上将电控气压调节阀与制动气室直接相连,建立了控制电压输入与制动气室压力变化瞬态过程的数学模型[6-7];王建强等设计了一种基于高速开关阀的气压电控辅助制动装置,进行了硬件在环仿真实验[8];王军等开发了一套能量回馈主动控制气压制动系统,通过引入双控比例继动阀实现制动力精确分配[9]。
本文以有人驾驶4×4轻型战术轮式车辆为基础,对原车气压制动回路进行改造设计,开发了一种电控气压制动系统。在完成该系统气压制动回路设计、电控硬件设计、电控软件设计以及台架逻辑测试、实车静态测试的基础上,在不同路面对系统性能进行实车道路测试,得到不同路面系统控制特性,并将此系统与无人车辆其他模块联调,以验证系统控制性能。
1 电控气压制动系统设计
在进行电控气压制动系统设计之前,首先给出无人车辆的整体架构。按照分层设计、模块化设计的思想,无人车辆可以分为上层规划决策模块和下层车辆平台两部分,如图1所示。
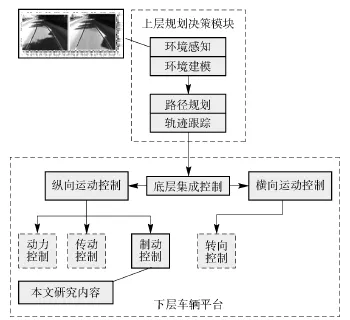
图1 无人车辆整体架构Fig.1 Overall structure of unmanned wheeled vehicle
上层规划决策模块主要包括环境感知、环境建模、路径规划和轨迹跟踪。其中环境感知模块通过外部环境感知传感器,如激光雷达、摄像机、红外相机、夜视设备、毫米波雷达等,获取前方及周围行驶环境信息;环境建模模块根据行驶环境信息建立环境模型,对多传感器信息进行融合,得到无人车辆的可通行区域;路径规划模块获取并处理任务信息,进行任务与全局路径规划,并结合可通行区域信息及车辆动力学特性约束,进行局部路径规划,得到无人车辆期望行驶轨迹;轨迹跟踪模块根据期望行驶轨迹,向下层车辆平台底层集成控制器下发期望车速和期望前轮偏角控制命令。底层集成控制器协调车辆纵向运动控制和横向运动控制,使其满足车辆动力学约束;纵向运动控制包括动力、传动和制动控制,实现对期望车速的跟踪控制;横向运动控制即转向控制,实现期望前轮偏角的跟踪控制。
1.1 气压制动回路设计
原车前桥行车制动系统由行车制动阀、快放阀和前桥行车制动气室组成,后桥行车制动系统由行车制动阀、继动阀和后桥行车制动气室组成。为实现电控行车制动,从气源并入比例电磁阀,并使用梭阀实现人工行车制动与电控行车制动模式切换,如图2所示。图2中气压制动回路实线表示工作管路,虚线表示控制管路。
梭阀一路进气口与行车制动阀出气口相连,另一路进气口与比例电磁阀出气口相连,梭阀出气口与快放阀进气口或继动阀控制口相连。梭阀具有比较两进气口气压大小并选择较大值进行输出的特性。因此,人工行车制动时,梭阀输出气压为行车制动阀出气口气压,从而由驾驶员控制无人车辆制动强度;电控行车制动时,梭阀输出气压为比例电磁阀出气口气压,从而由制动控制器控制无人车辆制动强度;同时实施人工行车制动和电控行车制动时,梭阀选择行车制动阀出气口和比例电磁阀出气口气压较大者进行输出,二者值相同时,梭阀输出相同的值,因此从气路结构上实现了人工行车制动与电控行车制动之间的灵活切换。
系统选用比例电磁阀,一方面具有制动压力精确连续可调的优点,另一方面可以避免文献[8]中气压电控辅助制动装置使用高速开关阀在制动压力调节过程中由于加压、保压和减压状态切换造成的系统震荡问题。
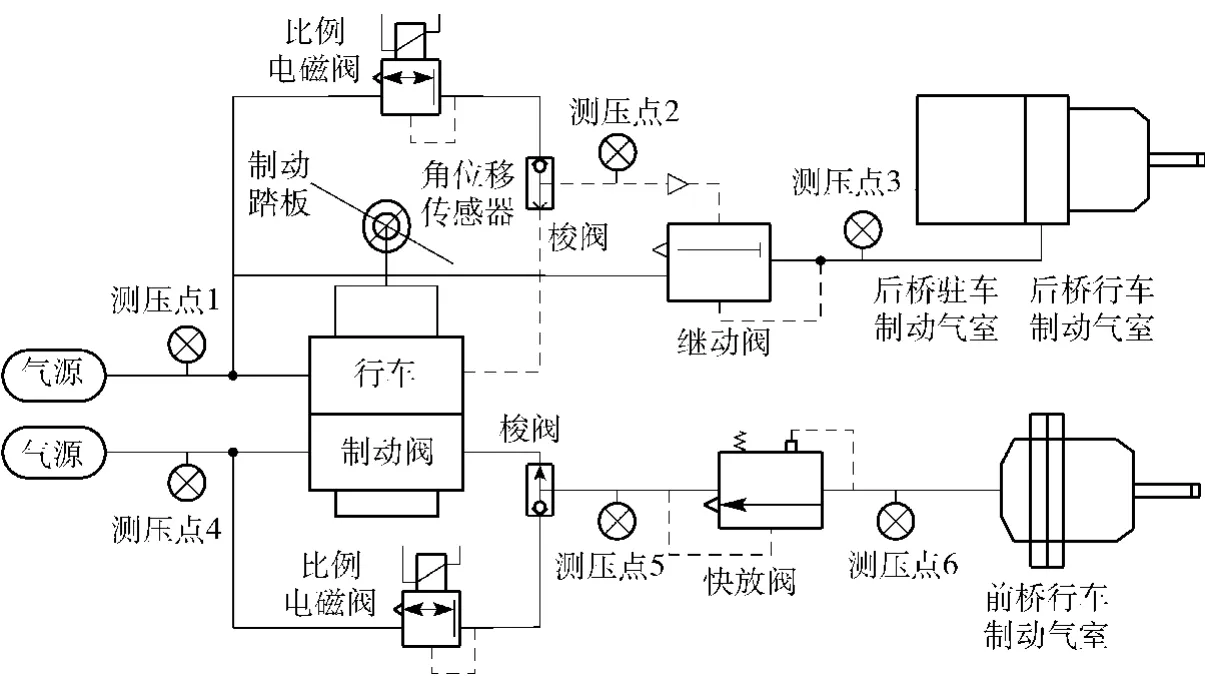
图2 气压制动回路设计Fig.2 Design of air brake circuit
1.2 电控硬件设计
根据电控制动控制及试验测试需求,设计的电控气压制动系统电控硬件如图3所示。其中,角位移传感器,用于采集制动踏板角位移信息;压力传感器,用于采集比例电磁阀进气口、梭阀出气口和行车制动气室进气口压力信息;遥控信号接收器,用于紧急情况(如上层规划决策模块规划错误或死机等情况)车辆试验人员通过遥控信号发生器对车辆实施紧急制动;比例电磁阀,用于实现电控行车制动压力调节。制动控制器包括:
1)模拟信号处理电路,用于将角位移传感器和压力传感器采集到的模拟信号经低通滤波处理后输送到微处理器;
2)脉宽调制(PWM)信号处理电路,用于将遥控信号接收器输出的PWM信号经光耦隔离后输送到微处理器;
3)CAN通讯模块,用于与原车CAN通讯网络相连,接收车辆行驶状态信息的同时,响应通讯网络上底层集成控制器的控制请求,并向该通讯网络发送自身控制状态;
4)串口通讯模块,用于与预装在采集与调试工控机上的上位机采集与调试软件通讯,接收上位机下发的单功能调试控制指令,并将采集数据和制动控制器控制状态发送到上位机,由上位机采集与调试软件进行保存,用于后续试验数据分析;
5)微处理器,根据接收到的信息并结合自身控制状态进行综合计算后,分别向PWM驱动电路和开关驱动电路下发控制信号;
6)PWM驱动电路,用于驱动比例电磁阀;
7)开关驱动电路,用于驱动行车制动灯;
8)电源模块,用于将无人车辆上的24 V车载蓄电池提供的不稳定直流电,转换成稳定的5 V和24 V直流电,为系统中其他各模块供电。
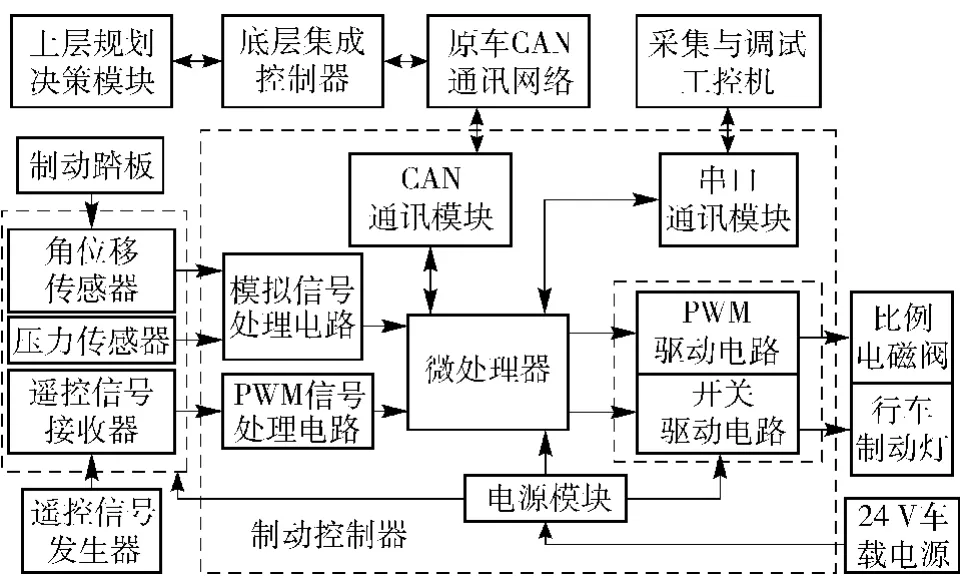
图3 电控硬件设计Fig.3 Design of electronic control hardware
1.3 电控软件设计
与电控硬件相匹配,设计的电控气压制动系统软件架构如图4所示。电控气压制动控制程序通过CAN通信与底层集成控制器纵向运动控制程序相协调,进行制动控制;通过串口通信与上位机采集与调试软件相配合,进行数据采集以及实车调试测试。主要包括以下三部分:
1)行车程序。包括行车制动控制程序和遥控制动控制程序。其中,行车制动控制程序用于无人驾驶模式需要实施电控行车制动时,响应底层集成控制器制动请求,实施电控行车制动;遥控制动控制程序用于无人驾驶模式紧急情况下,如上层规划决策模块规划错误或死机等情况,车辆试验人员判定无人车辆存在危及车辆、行人及其他生命财产安全的可能时,可以在远距离通过遥控信号发生器发出紧急制动遥控信号使得车辆紧急制动。
2)调试程序。包括单电磁阀阶跃输入程序和行车制动阶跃输入程序,用于车辆平台实车调试测试阶段,分别对电磁阀阶跃响应特性、车辆电控行车制动性能进行摸底测试。
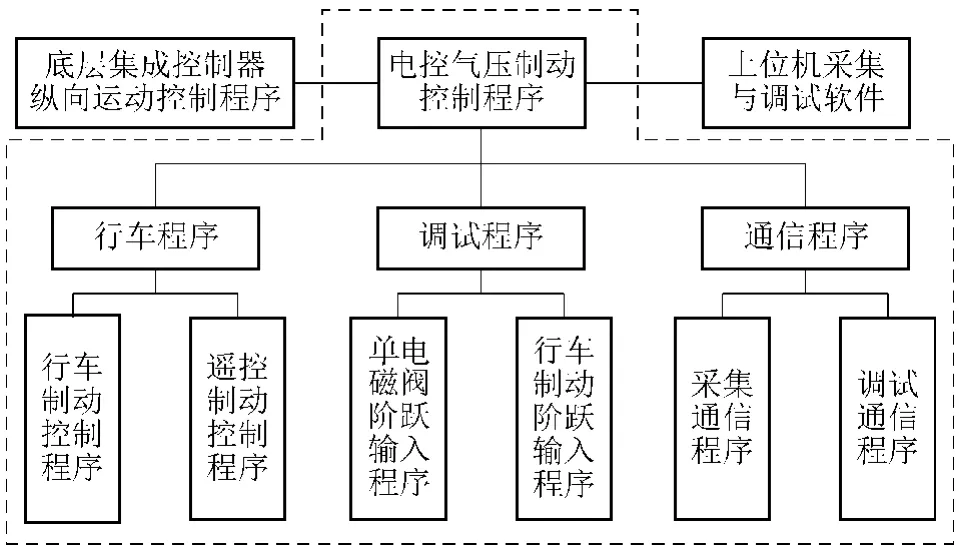
图4 电控软件设计Fig.4 Design of electronic control software
3)通信程序。包括采集通信程序和调试通信程序。其中,采集通信程序用于将电控气压制动系统中间状态发送至上位机采集与调试软件,以便于试验过程中监测系统状态并及时改进控制策略;调试通信模块用于接收上位机调试测试请求,并反馈当前调试程序状态信息,为调试程序各子程序提供跳转接口。
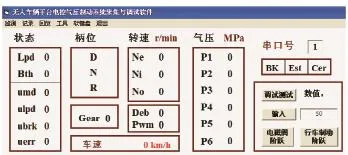
图5 上位机采集与调试软件主界面Fig.5 Main interface of computer acquisition and debugging software
上位机采集与调试软件使用VB编写,主界面如图5所示。图5中Lpd、Bth分别表示油门踏板开度和制动踏板开度;umd、ulpd、ubrk、uerr分别表示无人驾驶模式状态、油门请求百分比、制动请求百分比和故障码;柄位D、N、R分别表示前进挡、空挡和倒挡;Gear表示变速器当前挡位;Ne、Ni、No分别表示发动机转速、变速器输入轴转速和输出轴转速;Deb、Pwm共同表示系统调试状态;P1~P6分别对应图2中测压点1~6气压;开关状态BK、Est、Cer通过变亮或变暗分别指示是否人工干预制动、是否遥控制动、系统是否通信故障。该采集与调试软件主要实现如下功能:1)车辆行驶状态监测;2)电控气压制动控制状态监测;3)单电磁阀动作控制;4)行车制动阶跃输入控制;5)实时保存试验数据;6)离线绘制试验曲线。
2 系统试验测试
2.1 台架逻辑测试
为初步验证本文设计的电控气压制动系统功能和逻辑的正确性,搭建了如图6所示的电控气压制动系统台架,对第1节设计的气压制动回路、电控硬件、电控软件以及上位机采集与调试软件进行了全面调试。

图6 电控气压制动系统台架Fig.6 Bench of electropneumatic brake system
2.2 实车静态测试
台架调试通过后,对原车气压制动回路进行改造,改造完成后试验车辆如图7所示。按台架测试流程对实车进行原地静态调试,以保证后续实车道路测试安全、可靠地进行。

图7 试验车辆Fig.7 Test vehicle
2.3 电磁阀阶跃响应测试
在实车静态测试过程中,通过上位机采集与调试软件单电磁阀动作控制按钮向制动控制器发送单电磁阀阶跃响应测试命令,制动控制器响应该命令,控制电磁阀动作4 s,停止8 s,占空比输入从0到100%按2%步长递增,试验过程如图8(a)所示。电磁阀控制特性如图8(b)所示,可用(1)式表示:
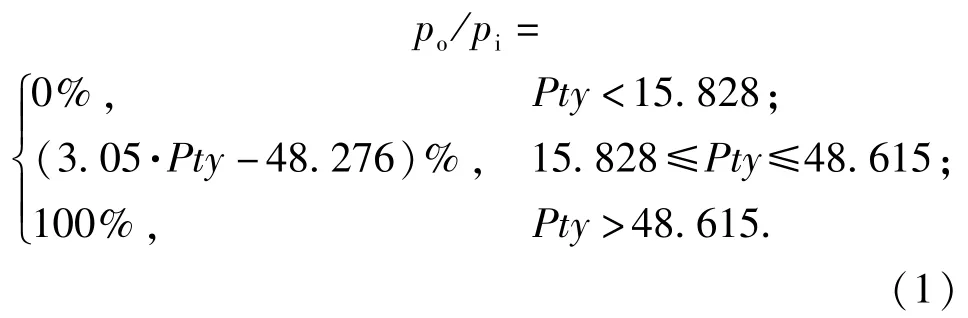
式中:po为比例电磁阀出气口气压(MPa);pi为比例电磁阀进气口气压(MPa);Pty为比例电磁阀占空比输入值(%).
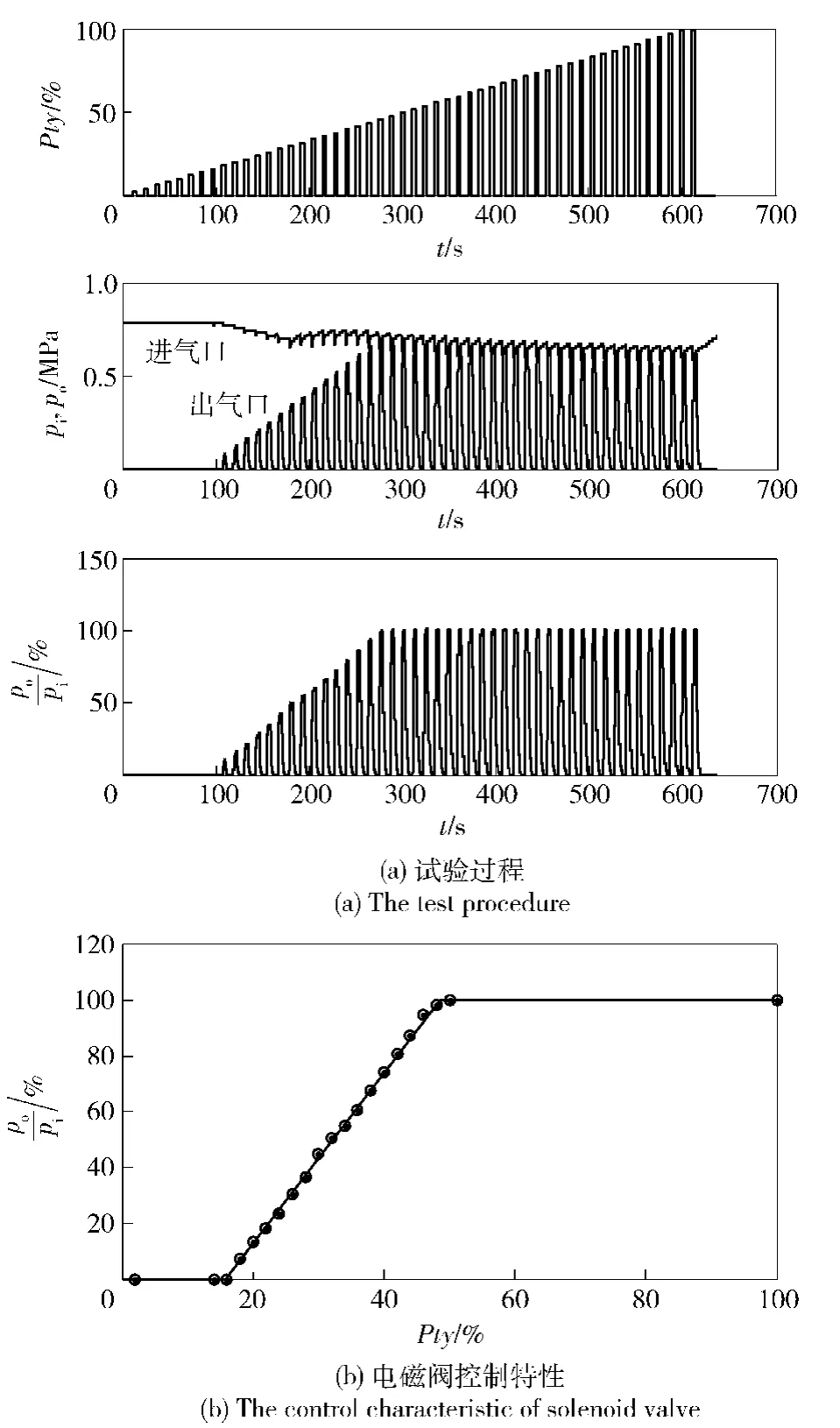
图8 电磁阀阶跃响应测试Fig.8 Solenoid valve step response test
通过电磁阀阶跃响应测试可知:占空比输入低于15.8%时,系统选用的比例电磁阀无动作;占空比输入高于48.6%时,电磁阀完全开启;占空比输入介于15.8%~48.6%时,电磁阀线性连续可调,具有良好的控制特性。
2.4 实车道路测试
试验项目在平直干水泥混凝土路(以下简称水泥路)和平直干石灰多合土路(以下简称土路)分别进行,路面情况如图9(a)和图9(b)所示。
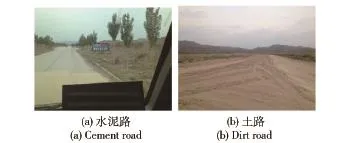
图9 试验道路Fig.9 Test road
通过实车道路试验对车辆空挡滑行、人工行车制动、电控行车制动以及二者切换功能和性能进行摸底测试,具体内容如下:
2.4.1 空挡滑行
不同路面车辆空挡滑行过程如图10所示。土路车辆滚动阻力系数在0.05~0.07之间变化,车速对其影响不大;通过最小二乘法拟合得到水泥路车辆滚动阻力系数与车速的关系如(2)式,数值较小且车速对其影响也不大。因此,后续无人车辆纵向运动控制策略制定时车辆滚动阻力系数取定值:水泥路为0.03;土路为0.06.

式中:f为水泥路车辆滚动阻力系数;ua为车速(km/h).
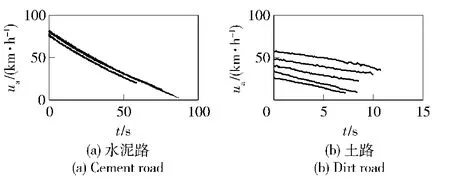
图10 空挡滑行试验Fig.10 Vehicle coasting in neutral position
2.4.2 人工行车制动
不同制动初速度下,驾驶员(试验过程共3名熟练驾驶员)按照自己的驾驶习惯实施紧急制动,记录试验过程,并使用(3)式统计每次制动过程车辆平均制动减速度,试验结果如图11所示。由图11可知,随着制动初速度的增加,驾驶员期望的制动强度加大。
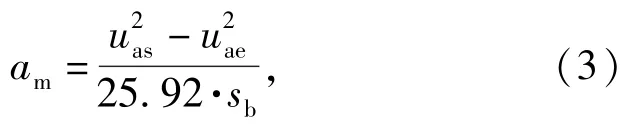
式中:am为车辆平均制动减速度(m/s2);uas为制动起始时刻车速(km/h);uae为制动终止时刻车速(km/h);sb为制动过程车辆行驶距离(m).
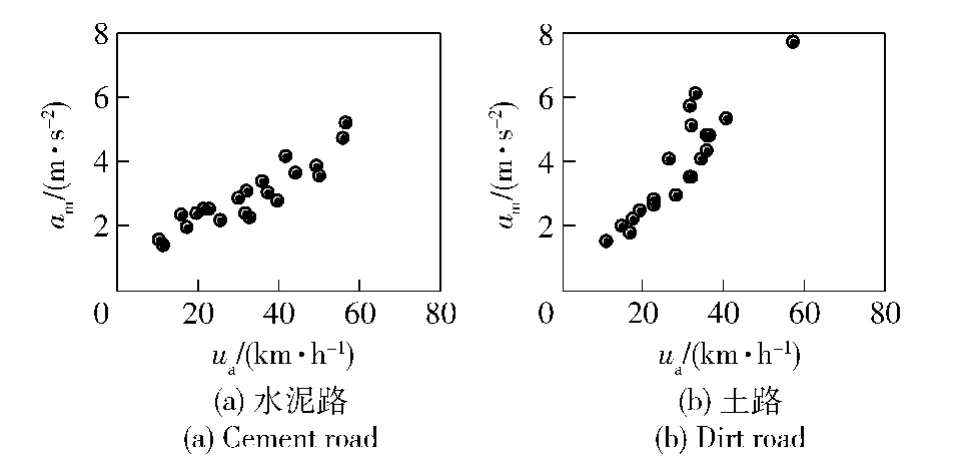
图11 人工行车制动试验结果Fig.11 Test results of manual service braking
2.4.3 电控行车制动
试验测试了不同制动初速度下不同占空比阶跃输入时车辆电控行车制动,结果如图12所示。
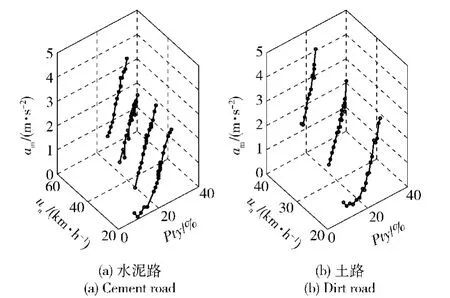
图12 电控行车制动试验结果Fig.12 Test results of electronic control service braking
试验过程中发现,占空比低于16%时,无制动效果,这与电磁阀控制特性试验结果相一致;占空比超过28%时,制动过于紧急;占空比在16%~28%范围内变化时,水泥路和土路制动减速度与占空比输入值关系可用(4)式和(5)式表示。因此,后续无人车辆纵向运动控制过程中将占空比范围限制在16%~28%,并使用(6)式和(7)式分别计算水泥路和土路电控行车制动占空比输入初值,在此初值基础上进行PI调节控制。

式中:ac为水泥路制动减速度(m/s2);ad为土路制动减速度(m/s2);Ptyc为水泥路占空比输入值(%);Ptyd为土路占空比输入值(%).
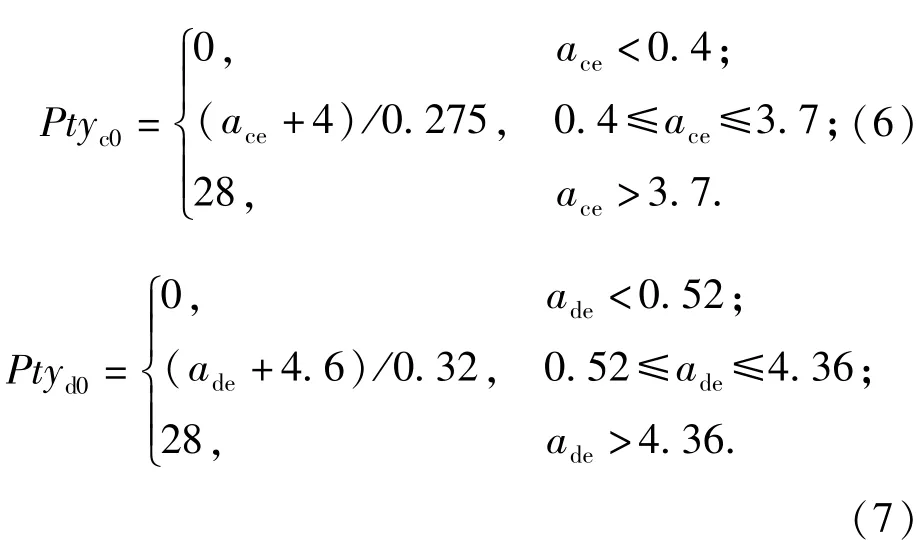
式中:ace为水泥路期望制动减速度(m/s2);ade为土路期望制动减速度(m/s2);Ptyc0为水泥路占空比输入初值(%);Ptyd0为土路占空比输入初值(%).
2.4.4 人工、电控行车制动相互切换
分别在水泥路和土路上进行人工行车制动过程中电控制动、电控行车制动过程中人工制动的试验。图13示例了水泥路、制动初速度为60 km/h时电控行车制动过程中人工干预制动的情况。车辆以1.9 m/s2减速度电控行车制动一段时间后,驾驶员踩制动踏板,进行人工干预制动,制动强度加大,车辆以2.75 m/s2减速度减速至停车。切换过程梭阀出气口气压变化平稳,验证了系统设计:使用梭阀可以从气路结构上保证人工行车制动与电控行车制动灵活切换、平稳过渡。同时注意到,由于后桥行车制动系统使用了继动阀,梭阀出气口气压仅作为控制信号,气源通过继动阀直接向后桥行车制动气室供气,因此后桥行车制动气室气压建立较前桥快。
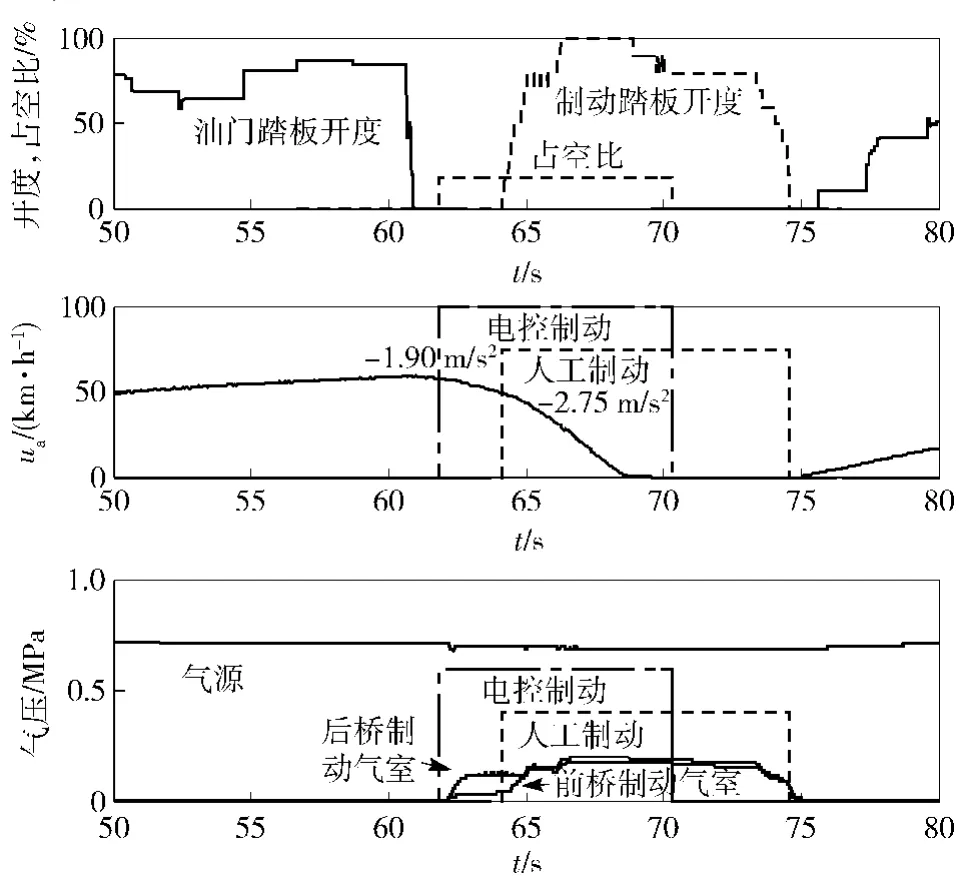
图13 电控行车制动过程中人工干预制动Fig.13 Manual intervention in the process of electronic control service braking
2.5 与无人车辆其他模块联调测试
按照图1给出的架构,将该轮式车辆进一步改造成无人车辆,并进行联调测试。图14示例了某次越野路面以期望车速为10.8 km/h行驶一段时间后自动停车的试验过程。图14中油门请求百分比、制动请求百分比为底层集成控制器向发动机控制器、制动控制器分别发出的控制量。其中,制动请求百分比与制动控制器实际响应占空比存在(8)式的映射关系。式中设置死区可以充分利用车辆滑行,并减少油门和制动的切换频率。
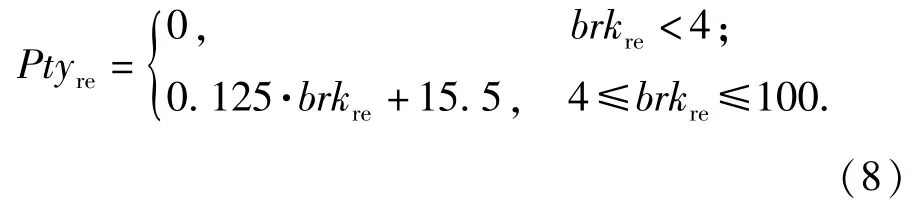
式中:brkre为制动请求百分比(%);Ptyre为制动控制器实际响应占空比(%).
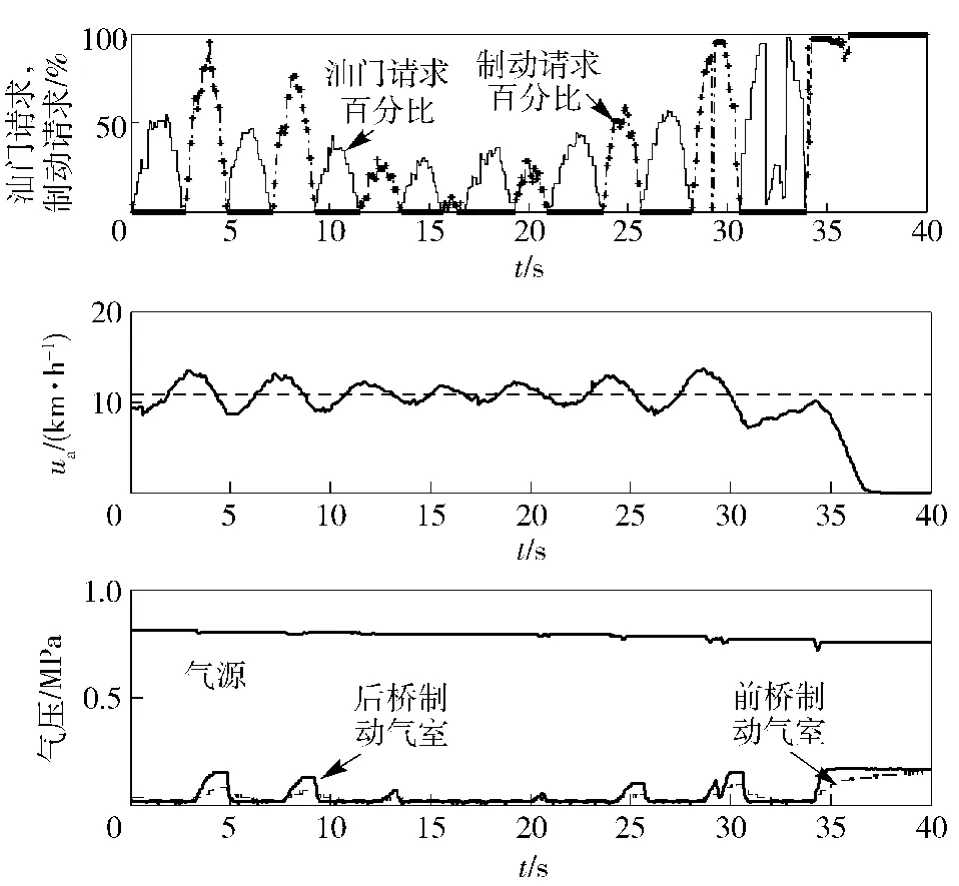
图14 越野路况无人车辆纵向运动控制Fig.14 Longitudinal motion control of unmanned wheeled vehicle on off-road terrain
整个试验过程中,该电控气压制动系统能够及时响应无人车辆电控行车制动控制请求。但由于该无人车辆处于初步研究阶段,纵向运动控制使用PI调节,各参数有待优化,且道路阻力波动较大,因此速度控制品质不高。下一阶段应配合无人车辆其他模块研究如何提高行驶速度以及速度控制品质。
3 结论
1)系统具有较好的控制特性,能够满足无人车辆制动控制性能需求;使用梭阀从气路结构上保证了人工行车制动与电控行车制动灵活切换、平稳过渡。
2)通过实车试验辨识出电磁阀控制特性、不同路面车辆滚动阻力系数、电控制动车辆减速度与车速及控制输入的关系,为后续无人车辆控制策略的制定提供试验依据和理论支撑。
(
)
[1] Yi K,Kwon Y D.Vehicle-to-vehicle distance and speed control using an electronic-vacuum booster[J].JSAE Review,2001,22(4): 403-412.
[2] 王建强,张德兆,李克强,等.汽车集成式电子真空助力器系统设计[J].中国公路学报,2011,24(1):115-121. WANG Jian-qiang,ZHANG De-zhao,LI Ke-qiang,et al.Design of vehicular integrated electronic vacuum booster systems[J].China Journal of Highway and Transport,2011,24(1):115-121.(in Chinese)
[3] Milanés V,González C,Naranjo J E,et al.Electro-hydraulic braking system for autonomous vehicles[J].International Journal of Automotive Technology,2010,11(1):89-95.
[4] Kunz M.Modular brake system approach for automated parking and automated driving[C]∥5th International Munich Chassis Symposium 2014.Munich,Germany:Springer Fachmedien Wiesbaden,2014:633-646.
[5] 沃尔克马尔·邓纳尔.博世创新技术迎接未来智能汽车时代[J].现代零部件,2014(3):21-24. Denner V.Bosch innovative technology to meet future intelligent automobile era[J].Modern Components,2014(3):21-24.(in Chinese)
[6] Karthikeyan P,Subramanian S C.Development and modelling of an electropneumatic brake system[C]∥2009 Intelligent Vehicles Symposium.Xi'an,China:IEEE,2009:858-863.
[7] Karthikeyan P,Sonawane D B,Subramanian S C.Model-based control of an electropneumatic brake system for commercial vehicles[J].International Journal of Automotive Technology,2010,11(4):507-515.
[8] 王建强,杨波,李升波,等.基于高速开关阀的气压电控辅助制动装置[J].交通运输工程学报,2011,11(4):61-67. WANG Jian-qiang,YANG Bo,LI Sheng-bo,et al.Pneumatic electronic assistant brake device based on high-speed on/off valve[J]. Journal of Traffic and Transportation Engineering,2011,11(4): 61-67.(in Chinese)
[9] 王军,乔军奎,齐志权,等.一种能量回馈主动控制式气压制动系统:中国,CN 102745183A[P].2012-10-24. WANG Jun,QIAO Jun-kui,QI Zhi-quan,et al.An energy feedback active control air braking system:China,CN 102745183A[P].2012-10-24.(in Chinese)
Research on Electropneumatic Brake for Unmanned Wheeled Vehicle
ZHU Min,CHEN Hui-yan,XIONG Guang-ming
(School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China)
The electronic control brake technology for unmanned driving is researched based on a 4×4 manned light tactical wheeled vehicle.An electropneumatic brake system is designed according to the structure and characteristics of the original vehicle air brake,which realizes an electronic control brake function in unmanned driving mode,and reserves the manual brake function in manual driving mode. The two modes can be switched freely.The control characteristics of solenoid valve,vehicle rolling resistance coefficient on different roads,and the relationship among vehicle deceleration,speed and control input of electronic control brake are identified through vehicle test.The test results show that the electropneumatic brake system can rapidly and accurately respond to the braking request,and the user can flexibly switch between manual braking and electronic-controlled braking.The electropneumatic brake system can be used for the commercial vehicles.
ordnance science and technology;wheeled vehicle;unmanned driving;electropneumatic brake;vehicle test
U463
A
1000-1093(2015)11-2017-07
10.3969/j.issn.1000-1093.2015.11.001
2015-01-06
国家自然科学基金项目(51275041、91420203)
朱敏(1986—),男,博士研究生。E-mail:zmhhxz@126.com;陈慧岩(1961—),男,教授,博士生导师。E-mail:chen_h_y@263.net
猜你喜欢
燕山大学学报(2022年4期)2022-08-01
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
幼儿画刊(2021年5期)2021-12-02
模具制造(2019年4期)2019-06-24
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
客车技术与研究(2014年6期)2014-02-28