License Plate Location Based on the Morphological Features
2015-11-25 09:32ChenShuaiZhaoHailongYiJunyan
电工技术学报 2015年1期
Chen Shuai Zhao Hailong Yi Junyan
(Beijing University of Civil Engineering and architecture Beijing 100044 China)
1 Introduction
The purpose of the license plate positioning system is to extract the correct license plate positioning from the entire image,and identify the license plate number.In the video surveillance system,through the CCD camera mounted above the road to momently monitor the road,and the collected road picture without vehicles through is defined as the background picture,compared the picture of vehicles through with the background picture,thereby extracting the complete contour models by differential operation.Notably,since the image forming process is affected by the system noise,underexposed,or excessive distortion of the optical system and other factors,often caused differences in background between the original image and the background image of the vehicle passing.After the actual differential operation,in addition to the complete image of the contour of the vehicle,and the screen is covered with a white noise.Through median filtering function filtering out those noise,thereby extracting clearer outline models.It would also extract the shadow part of vehicle,shadow and outline models stuck together,increasing the difficulty of identifying the true model.
After the careful observation,the author proposes a new method to locate the license plate rely on the vehicle contour,and license plate location flowchart as shown in Fig.1.
1.1 Extraction by differential operation
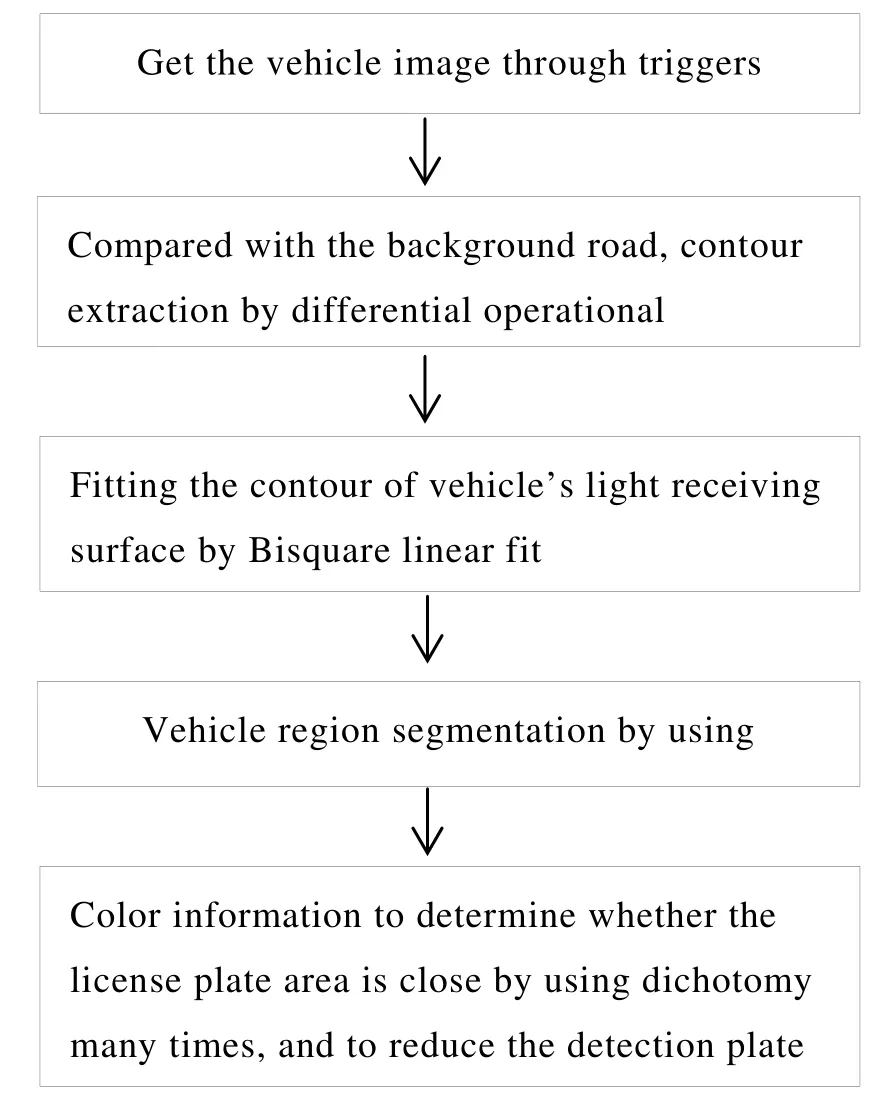
Fig.1 License plate location flowchart
In the video surveillance system,the collected road picture without vehicles through is defined as the background picture,compared the picture of vehicles through with the background picture,thereby extracting the complete contour models by differential operation.It is a very difficult and time-consuming to directly identify the license plate in the original image.Extracting area of the vehicle by difference algorithm,not only narrowed the scope of recognition,but also reduces the identification difficult.It is worth noting that,with the passage of time and changes in lighting conditions,the background picture will change.Therefore,the background screen should be synchronized updating,making the different error of models contour is minimized.The actual image of the scene is often strongly subjected to noise.Due to noise in the high frequency component is mapped in the frequency domain,and therefore the noise can be filtered by a low pass filter.In the condition without affecting the results,in order to simplify the algorithm,we can directly weaken the effect of noise by the average method in the neighborhood of airspace.For example,there are two methods for a pixel point neighborhood S:4 and 8 neighborhood.4 neighborhood corresponds to the average of the neighborhood shown in Fig.2,8 neighborhood corresponding to the average of the 8 neighbors as shown in Fig.3.
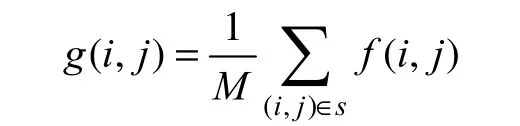
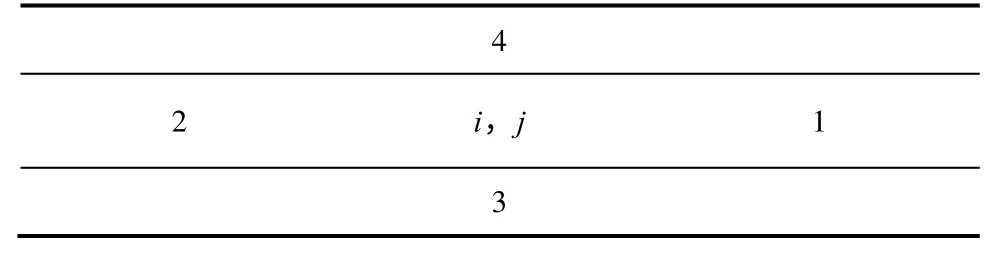
Fig.2 4 neighborhood
Fig.3 8neighborhood
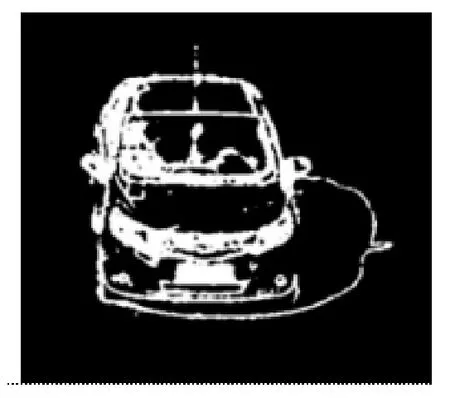
Fig.4 median filtering
Wherein,M is the total number of pixels except for center pixel point f(i,j) in the neighbor-hood,for the 4 neighborhood M=4 and 8 neighborhood M=8.However,Neighborhood average smoothing process will make gray-scale image dramatic changes in some places,especially the edges of objects and some other regional and character contour produce blur effect.In order to overcome such an image blur caused by the averaging,we set the threshold value to a fixed center point and its neighborhood average pixel value of the difference.Only the point is greater than the threshold value,it may be replaced with the average value of the neighborhood,and if the value is not greater than the threshold value,the original value remains the same,the processed image as shown in Fig.4.
1.2 Dichotomy gradually accurate license plate
There are mainly two methods about license plate location.First,the method of gray orientation is based on texture and geometric features of license plates to locate the license plate.Second,color image positioning method is characterized by the color and geometric characteristics of the license plate to locate the license plate.License plate segmentation algorithm mainly consists of gray threshold method,frequency domain and spatial segmentation,Hough changes in law.But in the condition of the complex and uneven lighting,these methods are difficult to obtain satisfactory segmentation results.The main reason is affected by the shadow of the vehicle.When the light source blocked by the opaque object in the incident direction,it will produce a shadow.Shadow and outline models stick together,which increase the difficulty of identifying the true model.Through careful observation,the author proposes a possible solution:In the morning,the sun light shines facing surface of vehicle,while generating shadows on the back of the vehicle.Taking the facing surface’s edge of vehicle as benchmark of vehicle contour edge,then fitting bisquare line,and fitting horizontal linear in the rear of the vehicle.The body region is narrowed by dichotomy,while using color information to identify the license plate area,so as to gradually achieve the purpose of the license plate precise positioning.In the afternoon,it is possible to achieve positioning plates according to a similar manner.
Where,Z is the smallest residuals,N is the length of y,Wiis the i th element of the weight,fiis the i th element of the best linear fit,yiis the i th element of Y.

Fig.5 Fitting contour line
1.2 Identify the license plate location using license plate color information after dichotomy
License plate colors are generally blue and white,and significant area and the background area can be divided out by different color channels .For example,blue and white is the most common license,and license area is a bright rectangle using a blue B-channel,but the license plate character does not appear in the license area.Because blue (0,0,255)and white (255,255,255) does not distinguish between B channel,but there was no such convenience in G,R channel or gray-scale images.When a color image is converted to gray-scale image,image gray value is calculated by the following formula:

Gray value range of the vehicle license plate images are mostly confined to r=(50,200).Overall,gray value is lower and the image is darker.According to the conditions the image processing system,it is preferable to expand the gradation range s=(0,255).For this reason,we transform the gray value as follows:
S=T(r),r=[rmin,rmax],Making S ∈[Smin,Smax].Wherein,T is a linear transformation.
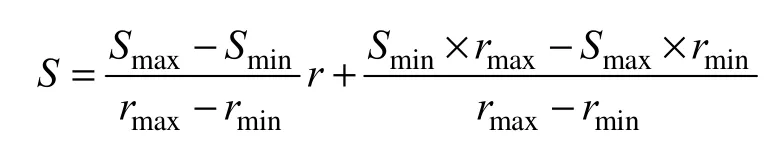
If r(50,200)、s(0,255),then:
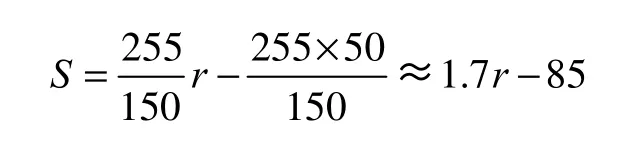
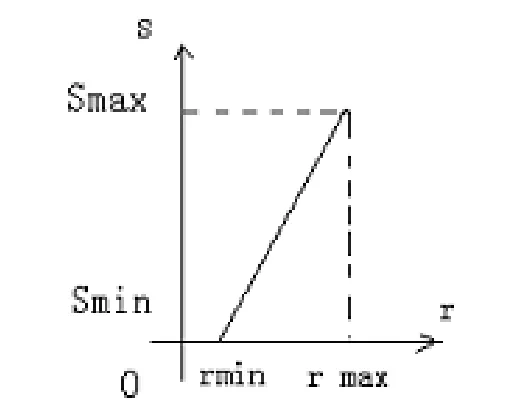
Fig.6 Gray linear transformation
1.3 License plate location recognition results
We regard Bisquare fitting straight line of vehicle Rear contour as the reference line,and obtain the center coordinates of Bisquare fitting straight line of facing surface’s edge of vehicle.The reference line is moved to the center position,so that the body is divided into two parts,and detects whether the license plate area is close near depend on the color information,if not,and dichotomy continues until recognized license plate boundary zone.The position of the plate is positioned finally,as shown in Fig.7.

Fig.7 License plate location
2 Conclusion
During the experiment,the authors encountered some difficulties.For example,the license plate edge point pixel is not continuous,the effect of Bisquare fitting line is not always ideal.If you can eliminate the error point,and then the fit line,the effect will be better.
Project is Supported by :
(1)Beijing Excellent Talent(Grant No.2012D 005017000004,2013D005017000017).
(2)Scientific Research Foundation of Beijing University of Civil Engineering and Archite-cture(Grant No.00331611017,00331613002).
(3)National Natural Science Foundation of China (Grant No.61402032).
(4)Beijing Municipal Natural Science Foundation (Grant No.4144072).
(5)The Open Research Project of The Beijing Key Laboratory of High Dynamic Navigation Technology (Grant No.HDN2015102).
Reference
[1]Li Bo,Xiang Sheng.Algorithm based on mathematical morphology and edge features of license plate location[J].Video technology and engineering,2010:96-98.
[2]Ji Ping,Matlab based license plate recognition system[J].Beijing:Electronic Design Engineering,2011:18-22.
[3]Li Peihong,Ding Yali,Liu Jilin,A video-based traffic information extraction system[J].Proc.IEEE:Intel VehSymp,2011:523-527.
[4]Ding Lijuan.Numerical methods[M].Beijing:Beijing Institute of Technology Press,2013.
[5]Huntsberger T L,Jacobsand,C L R.Cannon,L.Interactive fuzzy image segmentation[J].Pattern Recognition,2011,18(2):996-1110.
[6]Chen Y X,Wang J Z.A region based fuzzy feature matching approach to content based image retrieval[J].IEEE Transactionson Pattern Analysis and Machine Intelligence,2012,24(9):12522-12671.
[7]Wang J Z.Pathfinder:Multiresolution region based searching of patholo gyimages usingI RM[J].Journal of American Medical Informatics Association,Symposium Supplement,2012:883-887.
[8]MISHRA R R.Self organizing fuzzy neural network an application to character recognition.[C].The 9th International Conference on Neural Information Processing.[S.I]:IEEE,2012:2640-2644
[9]Parist R,et al.Car plate recognition by neural networks and image processing[J].In Proc.IEEE International Symposium on Circuits and Systems,2011:452-460
[10]Charl Coetzee,et al.PC based number plate recognition systems[J].In Proc.IEEE International Symposium on Industrial Electronics,2012:605-610.