
基于瑞利散射的大气偏振模式检测与模型重建
2015-12-02 07:01王晨光杨江涛李大林向长波
中北大学学报(自然科学版) 2015年5期
王晨光,唐 军,杨江涛,张 楠,李大林,刘 俊,向长波
(1.中北大学 电子测试技术重点实验室,山西 太原030051;2.中北大学 信息与通信工程学院,山西 太原030051;3.中北大学 仪器与电子学院,山西 太原030051;4.中国电子科技集团 第四十一研究所,山东 青岛266555)
偏振光导航作为一种新型的自主导航方式,因其很难在大范围区域内受到人为破坏和干扰、误差不随时间积累等特点,近年来受到了学界的广泛关注.该技术源于沙蚁等生物导航行为研究,而生物具备如此高的导航性能,关键在于其复眼结构中的敏感神经元具有高的偏振对比度,能够感知大气偏振模式并用于导航[1-2].大气偏振是地球的自然属性之一,瑞利散射理论有效解释了天空大气散射偏振现象[3],为开展大气偏振模式研究奠定了理论基础.
目前,偏振光导航领域使用的大气偏振模型仍以瑞利散射模型为主,虽然当天气变化(如多云、阴天等)时,太阳光发生大气米散射和外界干扰的因素增加,但Gábor Horváth等人的研究已经证实雾天、多云和阴天与晴天天空偏振分布均符合瑞利散射模型[4-7],该结论充分证实了瑞利散射理论在表述大气偏振模式的广泛适用性.在导航应用领域,Lanbrinos等人仿沙蚁POL神经元设计了偏振光检测传感器,并结合生物导航原理利用Sahabot型机器人通过检测天顶区域的偏振信息实现了航向获取[8-11].这种基于点区域的偏振获取方式极易受气象条件影响(如云层干扰、建筑物遮挡等),很难提供稳定可靠的导航信息.针对上述问题,有学者提出利用全天域大气偏振模式分布的对称性来获取导航航向信息,仿真验证了算法的有效性[12];并且随着偏振成像技术的不断发展,已有学者设计了一种仿生相机偏振光导航传感器[13],并对偏振成像方法下的方位角解算方法进行了设计验证[14].由此可见,利用全天域大气偏振模式作为信息来源进行导航研究已经在学界达成共识,而全天域大气偏振模式的高精度检测及瑞利模型重建是导航应用的前提条件.
本文针对大气偏振模式导航信息获取需求,基于高精度偏振分析仪、转台等模块搭建了大气偏振信息检测系统,实现了全天域大气偏振模式扫描检测,并利用Matlab软件对实测数据进行了数据处理与瑞利散射模型重建.该项工作可为偏振光导航应用及后期导航算法提供准确可靠的导航信息来源,具有一定的理论研究意义.
1 大气偏振模式Rayleigh描述
太阳光在进入地球大气层后,遇到大气粒子会发生散射现象,这种散射作用会改变光的偏振状态而形成偏振光,大量不同散射方向的偏振光和自然光叠加形成的偏振态分布被称为大气偏振模式.大气偏振模式呈现一定的规律性,其中蕴涵着重要的方向信息,通常可用偏振度(DOP)和偏振角度(AOP,也称为E矢量方向)进行表征[8].基于瑞利散射模型的大气偏振模式分布如图1所示.图1中,O点为地面观测者位置,Z为天顶,S是太阳所在位置,SM表示太阳子午线,ASM表示逆太阳子午线,短线的方向和宽度分别表示偏振角度和偏振度大小.
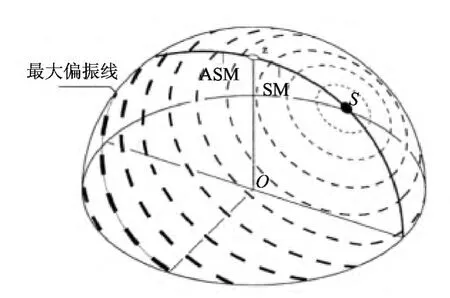
图1 理论大气偏振模式模型[8] Fig.1 Model of theoretic atmospheric polarization pattern
从图1中可以看出,大气偏振模式存在对称性:偏振度关于太阳子午线SM-ASM对称分布,偏振化方向关于SM-ASM逆对称分布;同时,大气偏振模式关于与太阳角距为90°的最大偏振线对称,距离最大偏振线越远,偏振度越小,太阳子午线附近的偏振度小于逆太阳子午线附近的偏振度.此外,大气偏振模式是以太阳为中心呈现同心圆分布,并随着太阳的运动而发生变化,上述对称性和整个大气偏振模式按天顶旋转,对称性始终存在.
基于上述分析,大气偏振模式可以看成一张以太阳位置、观测方向为基准的动态地图,因此,不同观测方向的偏振信息可以通过单次散射理论计算得出.大气偏振模式的三维空间坐标系OXYZ,如图2所示.
图2中,O为地理观测位置,X轴为地理北,Y轴为地理东,Z轴为天顶方向;P点表示任意观测方向,αp和hp分别为P点的方位角和高度角;αp以正北方向为起点,顺时针方向为正,取值范围为0°~360°.hp由地平圈向天顶方向为正,取值范围为-90°~90°.αs和hs分别为太阳S的方位角和高度角,其方向描述与观测点方位角和高度角相同.任意观测点的偏振度P及偏振角θ可
由式(),式()得到
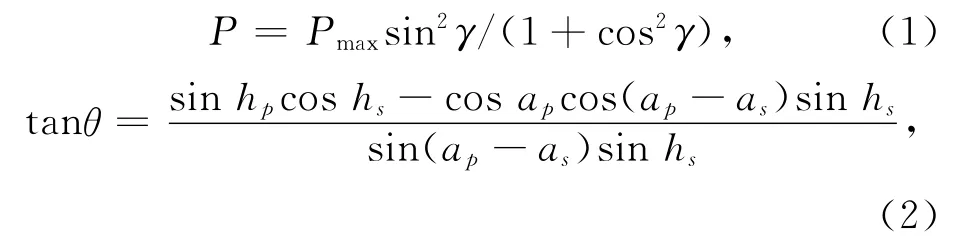
式中:Pmax表示最大偏振度;γ是和太阳位置及观测位置有关的参数.
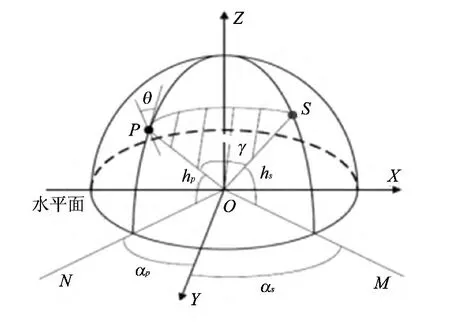
图2 理论大气偏振模式的空间坐标系 Fig.2 Spatial coordinate of theoretic polarization pattern
2 大气偏振模式检测与模型重建
2.1 实验平台的搭建
为了获取全天域大气偏振模式,本文搭建了一套扫描式大气偏振模式检测系统.该系统由偏振分析仪(Thorlabs公司生产的PAX5710)、水平转台、高度调节台、笔记本电脑构成.如图3所示.其中,PAX5710是带有外部偏振测量传感器的偏振分析仪,其传感器工作波长范围为400~700 nm,采样频率最高333 S/s,动态范围可达70 dBm,并且最多可容纳4路偏振测量传感器同时工作,可以满足高精度大气偏振模式单点测量要求.水平转台、高度调节台主要用于不同方位角、不同高度角大气偏振模式的扫描检测,完成全天域大气偏振模式获取.
图3 大气偏振模式检测系统 Fig.3 Measuring system of atmosphere polarization pattern
实验时,首先将该系统转台调节至水平状态,并将其初始位置调节至地理北方向作为参考基准,高度角测量范围设为0°~90°,水平方位角测量范围设为0°~360°,完成系统初始位置校准.然后将偏振分析仪工作波长设为450 nm(蓝光波段灵敏度更高),采样频率为66.7 S/s,水平方位角每隔约0.45°采集1次,高度角每隔15°(15°,30°,45°,60°,75°,90°)扫描一圈,共扫描6次完成天空半球偏振信息采集,整个测量过程在2 min以内.
2.2 偏振信息处理与瑞利模型重建
将实测数据导入电脑,利用Matlab软件进行数据处理,然后基于瑞利模型按照东北天坐标系重建出实测大气偏振模式.整个数据处理过程包含以下过程:①基准变换;②数据预处理;③瑞利模型重建.本文选用2015年3月20日晴朗天气下测试的数据(测试地点为:山西太原西山山顶(38°0′54″N,112°26′34″E))为例描述数据处理过程.
2.2.1 基准变换
由于利用偏振分析仪获取的实测数据参考基准与瑞利模型定义的偏振角度不一致,因此首先需要对偏振角度进行基准变换.偏振分析仪的偏振角度是以传感器测量头平面为基准的,该测量平面的X轴为水平方向,Y轴为沿观测点P点子午线方向的切线方向,偏振角度AOP为天空中观测方向P点的E矢量振动方向与X轴之间的夹角,且取值范围为[-90°,90°];而瑞利模型描述下的偏振方位角θ定义为天空中观测方向P点的E矢量振动方向与过P点子午线(弧ZP)的夹角,因此需作式(3)变换即可转化为瑞利散射下的偏振方位角θ.

2.2.2 数据预处理
由于实验时水平转台旋转一周,高度角调节一次,为了提高测试稳定性,将偏振分析仪采集卡先启动,然后水平转台开始工作,因此,每圈数据的采集起止时刻会略有不同,需要通过判断周期时长来提取单周期信号,并确保采集起止时刻相同,提高模型重建精度.数据预处理后的6圈偏振角度、偏振度数据输出如图4所示.
从图4(a)中可以看出,经过预处理后的数据起止时间相同,周期均为800个采样点,偏振角的输出范围为[-90°,90°].同时,由于“15°纬圈数据”是在低纬度扫描,因此在采样点350~450之间遭受周围建筑物遮挡导致偏振角度出现跳变;“30°纬圈数据”、“45°纬圈数据”在采样点280~310之间遇到太阳附近受太阳光直射影响散射光被退偏,数据异常跳变;“60°纬圈数据”、“75°纬圈数据”、“90°纬圈数据”数据比较正常.结合图4(b)偏振度的大小可以看出,偏振度的变化与偏振角度受建筑物遮挡、太阳位置的影响结果一致,且最大偏振度为0.6左右,同时,对比图4(a),图4(b)可以清晰区分出太阳子午线(采样点285的测量位置)与太阳逆子午线(采样点682的测量位置),因此,上述实测数据真实反映了大气偏振模式的变化规律,可以为后续瑞利模型重建奠定基础.
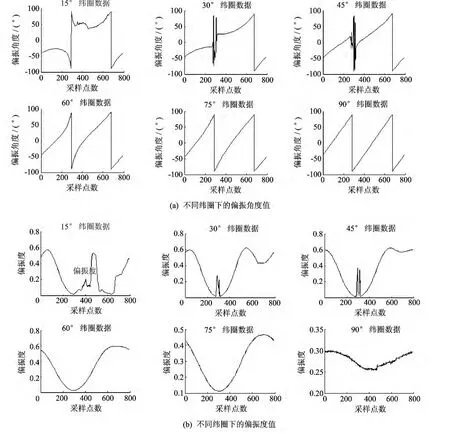
图4 实测数据预处理 Fig.4 The measured data pretreatment
2.2.3 瑞利模型重建
基于瑞利散射模型表述,本文以东北天坐标系为参照,结合实测数据将高度角范围设为0°~90°,水平方位角范围设为0°~360°,建立瑞利散射空间模型.根据上述实测数据完成的时间(2015年3月20日10点)、地 点(西 山 山 顶(38°0′54″N,112°26′34″E)),结合瑞利散射模型式(1),式(2)可以求出理论太阳高度角为37.18°,方位角为127.11°,为了方便后期数据分析与比对,需要将实测数据根据太阳子午线的位置作线性平移,将其映射至三维空间,即可实现瑞利模型重建.
3 实验结果及分析
为了验证大气偏振模式实测结果,本文利用Matlab软件进行了瑞利散射理论仿真与实测数据空间模型重建,并对二者的数据一致性进行了分析.
3.1 大气偏振二维模式重建
大气偏振二维模式信息是偏振光导航二维航向获取的关键,因此本文利用上述实测数据进行了二维模型重建,并与理论模式进行了对比,实验结果如图5所示.
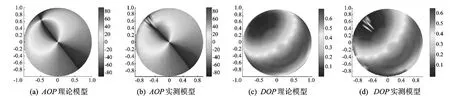
图5 理论和实测大气偏振二维模式对比 Fig.5 Comparison of the two-dimensional atmospheric polarized pattern between the theoretical and the measured model
图5表明,晴朗天气下实测大气偏振模式偏振角AOP的分布关于太阳子午线对称,偏振角取值在-90°~90°之间,与瑞利散射理论模型一致;实测偏振度的最大偏振线出现在与太阳子午线呈90°的位置,规律与瑞利散射理论模型一致,但实测偏振度取值最大可达0.6,符合实际天气情况.
3.2 大气偏振三维模式重建
大气偏振三维模式信息是大气偏振模式导航特征提取的来源,也是开展偏振光导航三维空间姿态获取的关键,因此本文利用上述实测数据进行了三维模型重建,并与理论模式进行了对比,实验结果如图6所示.
图6表明,二维、三维实测数据得到的大气偏振模式三维分布同基于Rayleigh散射的理论分布均有非常好的吻合度,只是在分布模型中有两个区域数据不理想,主要原因是太阳附近受太阳光直射影响,散射光被退偏和低纬度角扫描区域受建筑物遮挡影响而造成的,也充分证实了传统单点传感器测量获取数据不稳定的问题.而采用全天域扫描方式获取,其大气偏振模式二维分布信息量巨大,且由于航向获取导航特征——太阳子午线分布的广域性,局部干扰、建筑物遮挡很难影响,因此全天域大气偏振模式是未来导航应用的发展趋势.
3.3 实测大气偏振模式误差分析
为了定量分析实测大气偏振模式与理论Rayleigh模型的相似度,本文定义实测模型同理论模型的误差为


式中:AOP代表实测偏振角度;AOPt代表理论偏振角度;Δθ代表偏振角误差;DOP代表实测偏振度;DOPt代表理论偏振度;Δd代表偏振度误差.实验结果统计如图7所示.
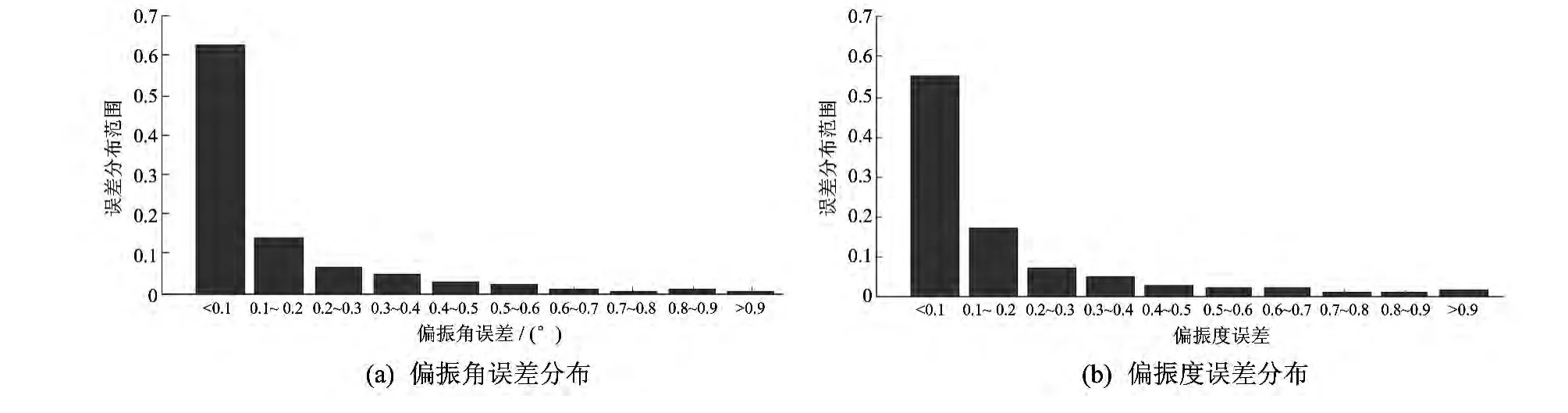
图7 实测三维大气偏振模式与理论Rayleigh模型误差分析 Fig.7 Error analysis between the three-dimensional measured atmospheric polarized pattern and theoretical Rayleigh scattering model
图7(a)为三维大气偏振模式偏振角实测值与理论值的误差分析柱状图.其中,误差小于0.1的数据占所有数据的比例为64%;误差在0.1~0.5之间的数据占所有数据的比例为22%;误差大于0.5的数据占所有数据的比例约为8%.
图7(b)为三维大气偏振模式偏振度实测值与理论值的误差分析柱状图.其中,误差小于0.1的数据占所有数据的比例为56%;误差在0.1~0.5之间的数据占所有数据比例为33%;误差大于0.3的数据占所有数据的比例约为11%.
上述实验结果表明,三维大气偏振模式实测模型偏振角误差小于0.5°的偏振信息占92%,偏振度误差小于0.5的偏振信息占87%,与理论模型基本一致.造成测量误差主要原因如下:①理论大气偏振模式是以Rayleigh单次散射理论表征的,但实际大气偏振模式的散射状态与散射粒子形状和大小有关,通常会出现瑞利散射、米散射以及几何光学散射同时存在的情况,因此理论与实测存在一定误差;②偏振分析仪测量系统虽然解决了大气偏振模式全天域检测问题,但扫描方式存在实时测量误差,导致模型重建时存在误差,但由于测试时间较短,太阳位置发生变化非常小,因此误差在允许的范围内;③建筑物遮挡、云层干扰、以及太阳附近受太阳光直射影响散射光被退偏等因素的影响也是造成上述测量误差的重要原因.
4 结 论
本文针对大气偏振模式导航信息获取需求,基于高精度扫描式大气偏振信息检测系统对全天域大气偏振模式进行了检测,利用Matlab软件对实测数据进行了处理,结合瑞利散射模型实现了大气偏振模式二维、三维模式重建.实验结果证明了本文构建的二维、三维大气偏振模式分布模型同基于Rayleigh散射的理论分布均具有非常好的吻合度,实测大气偏振模式信息准确可靠,为开展偏振光导航应用及后期导航算法研究奠定了基础.
[1]Labhart T.Polarization-opponent interneurons in the insect visual system[J].Nature,1988,331(6155):435-437.
[2]Fent K,Wehner R.Oceili:A celestial compass in the desert ant cataglyphis[J].Science,1985,228(4696):192-194.
[3]Lord Rayleigh.On the light from the sky,its polarization and color[J].Phil.Mag,1871,61:107-279.
[4]Suhai B,Horváth G.How well does the Rayleigh model describe the E-vector distribution of skylight in clear and cloudy conditions?A full-sky polarimetricstudy[J].J.Opt.Soc.Am.A,2004,21(9):1669-1676.
[5]Dahlberg A R,Pust N J,Shaw J A.Effects of surface reflectance on skylight polarization measurements at the Mauna Loa Observatory[J].Optics express,2011,19(17):16008-16021.
[6]褚金奎,王威,崔岩,等.气溶胶对天空偏振辐射影响的测量[J].光学精密工程,2012,20(3):520-526.Chu Jinkui,Wang Wei,Cui Yan,et al.Measurement for influence of aerosols on polarized sky radiance[J].Optics and Precision Engineering,2012,20(3):520-526.(in Chinese)
[7]崔岩,陈小龙,褚金奎,等.晴朗天气下满月偏振模式的研究[J].光学学报,2014,34(10):1012002.Cui Yan,Chen Xiaolong,Chu Jinkui,et al.Study on polarization pattern of full moonlight in clear sky[J].ActaOpticaSinica,2014,34(10):1012002.(in Chinese)
[8]Dimitrios Lambrinos,Ralf Moller,Rolf Pfeifer.A mobile robot employing insect strategies for navigation in Robotics and Autonomous Systems[J].Special issue on Biomimetic Robots,2000,30(1):39-64.
[9]Wang Y J,Hu X P,Lian J X,et al.Design of a device for sky light polarization measurements[J].Sensors,2014,14(8):14916-14931.
[10]丁宇凯,唐军,王飞,等.仿生复眼光学偏振传感器及其大气偏振E矢量检测应用[J].传感技术学报,2013,26(12):1644-1648.Ding Yukai,Tang Jun,Wang Fei,et al.Polarization sensor based on bionic compound eyes and its applicationsin the atmospheric E-Vector measurement[J].Chinese Journal of Sensorsand Actuators,2013,26(12):1644-1648.(in Chinese)
[11]胡良梅,高丽娟,范之国,等.仿沙蚁神经处理机制的偏振光导航方法研究[J].电子测量与仪器学报,2013,27(8):703-708.Hu Liangmei,Gao Lijuan,Fan Zhiguo,et al.Study on polarization light navigation method ofneural processing mechanism of cataglyphis[J].Journal of Electronic Measurement and Instrument,2013,27(8):703-708.(in Chinese)
[12]田柳,高隽,范之国,等.基于大气偏振模式分布规律的导航方向角计算方法[J].电子学报,2012,40(1):141-146.Tian Liu,Gao Jun,Fan Zhiguo,et al.The method of the navigation direction angle calculation with the distribution of the atmospheric polarization pattern[J].ActaElectronica Sinica,2012,40(1):141-146.(in Chinese)
[13]Wang D B,Liang H W,Zhu H,et al.A bionic camera-based polarization navigation sensor[J].Sensors,2014,14(7):13006-13023.
[14]卢皓,赵开春,尤政,等.基于偏振成像的方位角度解算算法的设计与验证[J].清华大学学报(自然科学版),2014,54(11):1492-1496.Lu Hao,Zhao Kaichun,You Zheng,et al.Design and verification of anorientation algorithm based on polarization imaging[J].J.Tsinghua University(Science ffTechnology),2014,54(11):1492-1496.(in Chinese)
猜你喜欢
家庭影院技术(2021年8期)2021-11-02
潍坊学院学报(2021年6期)2021-07-22
学生天地(2020年18期)2020-08-25
中国惯性技术学报(2020年2期)2020-07-24
电子制作(2019年12期)2019-07-16
家庭影院技术(2019年1期)2019-01-21
智能物联技术(2018年3期)2019-01-10
学苑创造·A版(2017年4期)2017-05-13
小天使·一年级语数英综合(2015年8期)2015-07-06
小朋友·快乐手工(2015年1期)2015-03-13
