SCARA 机器人点对点运动轨迹规划方法
2015-12-02 01:12赵登步白瑞林沈程慧
计算机工程 2015年8期
赵登步,白瑞林,沈程慧,李 新
(1.江南大学轻工过程先进控制教育部重点实验室,江苏 无锡 214122;2.无锡信捷电气股份有限公司,江苏 无锡 214072)
1 概述
随着机器人在各个领域对作业精度和工作效率需求的不断提高,要求机器人能够快速准确地完成作业,即机器人在作业时既要保证运动轨迹平滑、精准,又要保证运动时间最短,需采用合理的方法对机器人的运动轨迹进行规划。对于轨迹为点对点(Point-to-Point,PTP)运动形式的机器人运动轨迹,只需要规划机器人关节空间轨迹。这种机器人运动轨迹主要用在电子行业(如电子类的IC 点焊、元器件贴片、分拣装箱等操作),用于两点之间的抓放动作。
若机器人运动轨迹的速度、加速度和加加速度曲线突变或者不连续将导致机器人运动过程中出现振动现象[1],这将严重影响执行器的使用寿命,增大机器人轨迹跟踪误差,降低跟踪精度[2]。为此一些研究学者提出采用多项式[3-5]或B 样条曲线[6-8]插值关节空间轨迹以获得连续、平滑的轨迹。轨迹时间最优对提高生产效率具有重大的意义。对此很多方法是在满足机器人运动学、动力学约束条件下,通过优化算法(遗传算法[4]、二次规划方法[6]、信赖域方法[8]、动态规划算法[9]、特里亚金最小值原理[10])寻优时间节点,使总的运行时间最少,以获得时间最优轨迹。然而这些方法复杂度大,计算时间长,尤其当曲线的阶次越高时,计算量越大,这将严重影响机器人的实时性。因此,需要研究算法复杂度小、计算简单的轨迹算法来规划PTP 轨迹。
由于SCARA 机器人执行器采用伺服驱动器驱动伺服电机,伺服驱动器一般采用速度控制模式,直接输入速度曲线,因此可以从速度曲线角度规划出最优时间轨迹。根据速度越大时间越短这一特点,通常选择梯形速度曲线[11]作为时间最优轨迹,梯形速度曲线具有公式简单、计算量小的优点[12],但这种曲线会导致加速度突变和力矩不连续[13],使机器人运行时出现震动现象。为解决加速度突变不连续问题采用S 形速度曲线[14-16],然而S 形速度曲线算法的表达式是分段形式,方程的形式难以确定;且可能产生无理方程或高次方程,难以在微处理器中求解,并且S 形速度曲线具有加加速度曲线不连续的缺点[17-18]。
针对以上研究内容的不足,本文提出一种基于时间延时的指数函数速度轨迹规划方法,此方法规划出的速度曲线具有和S 形曲线相同的速度轮廓,不仅拥有连续的速度、加速度和加加速度曲线,可以产生平滑的轨迹,而且公式简单、计算量小;轨迹规划时只需要确定2 个参数:时间增益α 和延迟时间Td,即可确定规划的轨迹。
2 指数函数原理
定义指数函数的表达式为:

其中,u=αt;νmax表示轨迹的最大速度;α 表示时间增益参数;t 表示时间。其曲线图形如图1 所示。
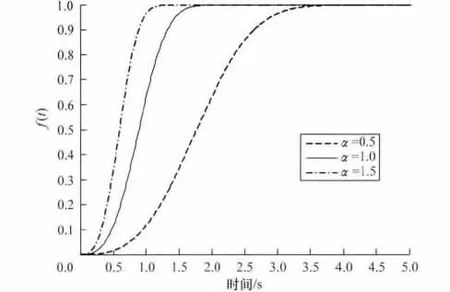
图1 指数函数曲线
其表达式分别如下所示:
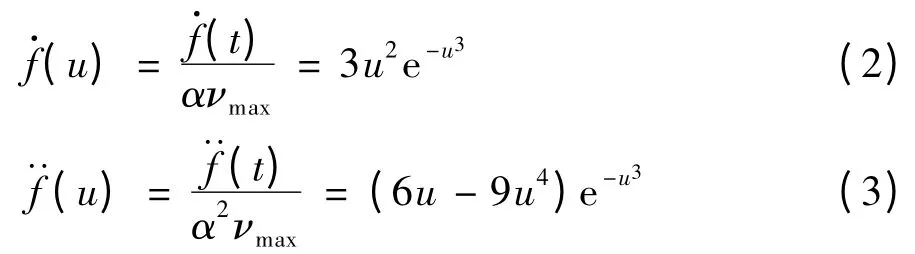
一阶导数和二阶导数曲线图形分别如图2 和图3所示。
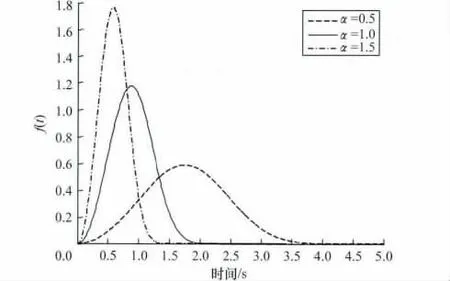
图2 指数函数一阶导数曲线
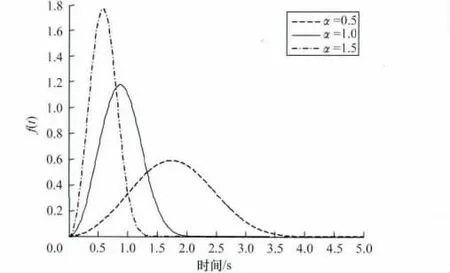
图3 指数函数二阶导数曲线
从图1 中可以看出α 取值越大,指数函数曲线越抖,这说明曲线加速度越大。图2 和图3 显示出曲线的一阶导数和二阶导数均连续,即加速度曲线和加加速度曲线将均会连续和平滑。这为选择指数函数作为速度规划曲线奠定基础,因为其可以产生连续平滑的加速度和加加速度曲线。
3 指数函数时间增益
为了保证轨迹规划的曲线最大值不超过执行器的最大约束范围。需要研究指数函数的最大值。令指数函数曲线f(t)的二阶导数和三阶导数都等于0,可知其一阶导数和二阶导数取最大值时的时刻为:
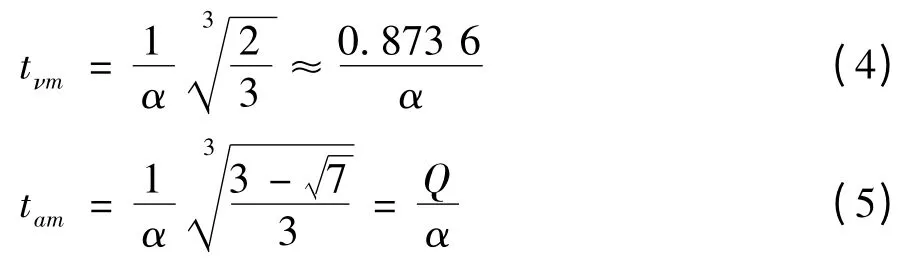
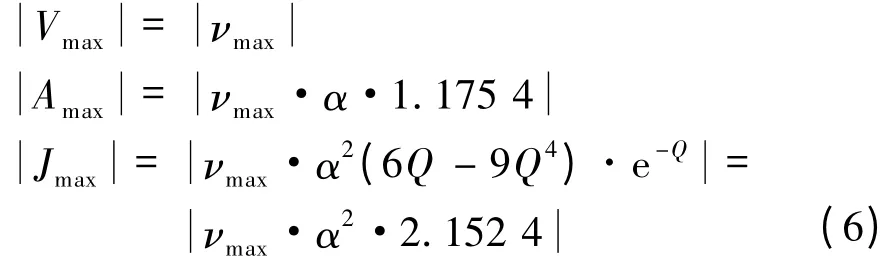
因此,当给定执行器的最大限制条件为Vmax,Amax,Jmax时,为了达到在满足约束条件情况下运动最快的目的,时间增益α 取值为:

4 指数函数速度曲线规划方法
针对PTP 运动轨迹,梯形速度曲线产生的轨迹是时间最优的,因其采用最大加速度和速度来产生最快的运动。图4 显示出其运动位移(m)、速度(m/s)和加速度(m2/s)曲线。图中运行位移为1 m,梯形曲线最大速度为1 m/s,最大加速度为2 m/s2。由图4 可以看出梯形速度曲线的加速度曲线是不连续的,在0.5 s 时刻产生了从0 到最大值的突变现象。这在现实中是不允许的,因为会使执行器出现振动现象,降低轨迹跟踪精度和执行器的使用寿命。
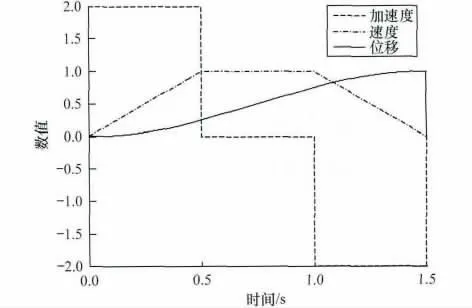
图4 梯形速度规划曲线
如果采用S 形速度曲线规划相同的位移将产生梯形加速度曲线,这将解决加速度突变的问题。然而,S 形速度曲线需要一定的时间来达到最大加速度的值,整个运动过程相比梯形速度曲线会稍微慢一点。图5 显示出S 形速度曲线的位移、速度和加速度曲线。从图中可以看出,S 形速度曲线产生的速度轨迹近似于梯形速度曲线的速度轨迹,可以认为其产生的轨迹是近似时间最优的。图中没有显示出S 形速度曲线加加速度曲线,其加加速度曲线是阶跃形不连续的,在执行器高速运动时将影响其性能。
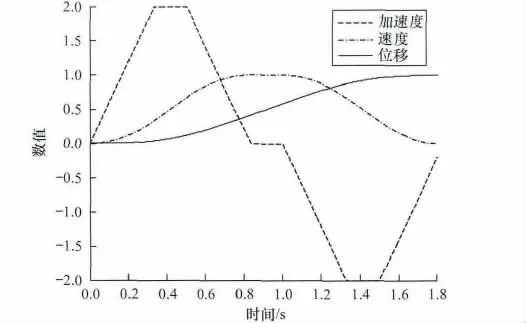
图5 S 形速度规划曲线
为了解决加加速度不连续的问题,产生更好的时间最优曲线,本文结合指数函数的特点,定义速度曲线公式为:
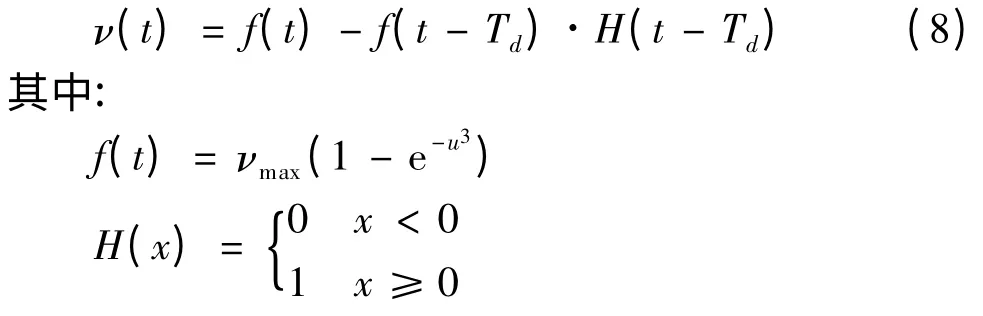
其速度曲线如图6 所示。
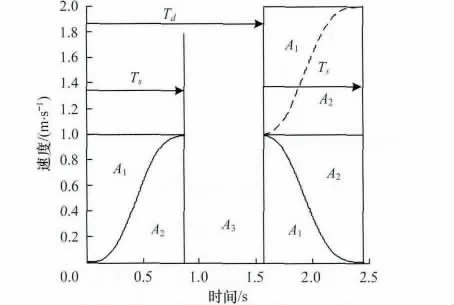
图6 指数函数速度曲线
图中t=0~Td为第1 段指数曲线,Td到Ts为第2 段指数曲线,第1 段减去第2 段构成整条速度曲线。由图6 可以看出,此速度曲线轮廓和S 形速度曲线轮廓类似,可以认为产生的轨迹也是近似时间最优的。
已知速度求位移可以通过积分的方式获得,积分时间为0~Td,但此处指数函数的积分并不容易,加上速度曲线是由2 段指数函数构成的,这增加了积分的难度。从图中看出,整段速度曲线包括的面积由A1,A2和A3组成,整个位移值可以表示成A1+A2+A3,而A1+A2+A3的值为Vmax·Td的值,所以位移为:

定义稳定时间为达到最大速度值的99.9%。则:

所以总的运行时间为:

整个轨迹规划流程如图7 所示。

图7 指数函数规划流程
5 实验仿真
本文实验仿真对象是SCARA(Selective Compliance Assembly Robot Arm)机器人,如图8 所示。
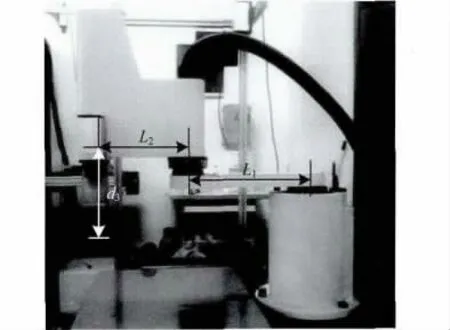
图8 SCARA 机器人
SCARA 机器人连杆参数分别为L1为350 mm,L2为250 mm,d3=100 mm。初始空间位置为(600 mm,0 mm,-100 mm,0°),目标空间位置(-60 mm,388 mm,-350 mm,240°)。现要从初始位置运动到目标位置,经逆解可得SCARA 机器人各关节需要运动位移如表1 所示。

表1 SCARA 机器人各关节运动位移
机器人4 个关节机械物理限制条件如表2所示。
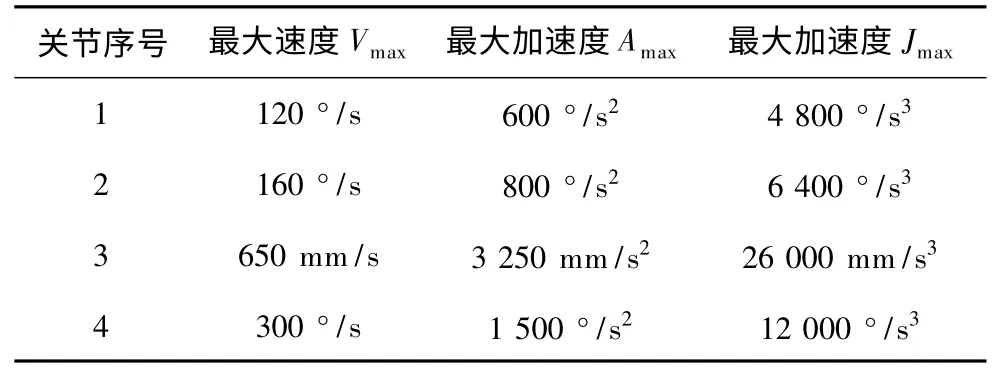
表2 SCARA 机器人物理约束条件
由推导公式可知时间增益为:
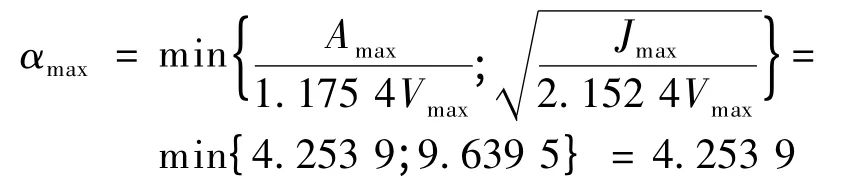
为方便计算,这里取时间增益为整数,即αmax=4。
由式(9)得Td1=0.5 s,Td2=0.625 s,Td3=0.39 s,Td4=0.8 s。
因此,4 个关节指数函数速度曲线分别为:

为方便说明本文所设计的轨迹规划方法的有效性,采用S 形速度曲线规划方法作对比分析。S 形速度曲线的详细设计过程请参考文献[16]。
4 个关节运动时间对比分析如表3 所示。仿真结果如图9~图12 所示。
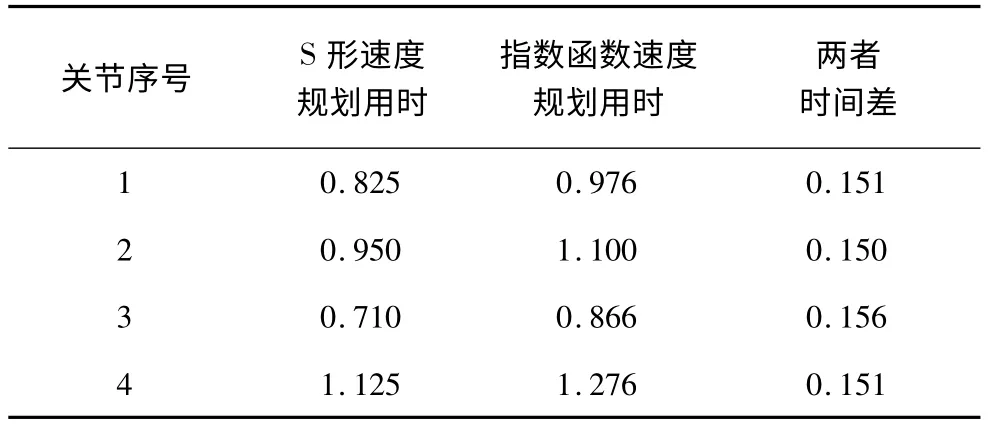
表3 4 个关节运动总时间 s

图9 第1 关节S 形速度曲线规划

图10 第2 关节S 形速度曲线规划
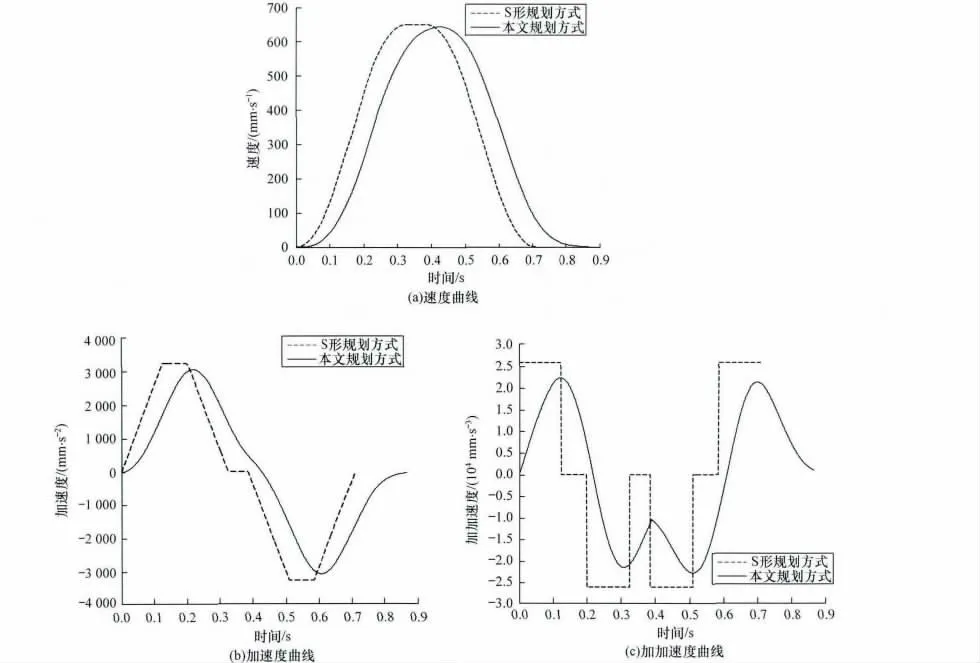
图11 第3 关节S 形速度曲线规划
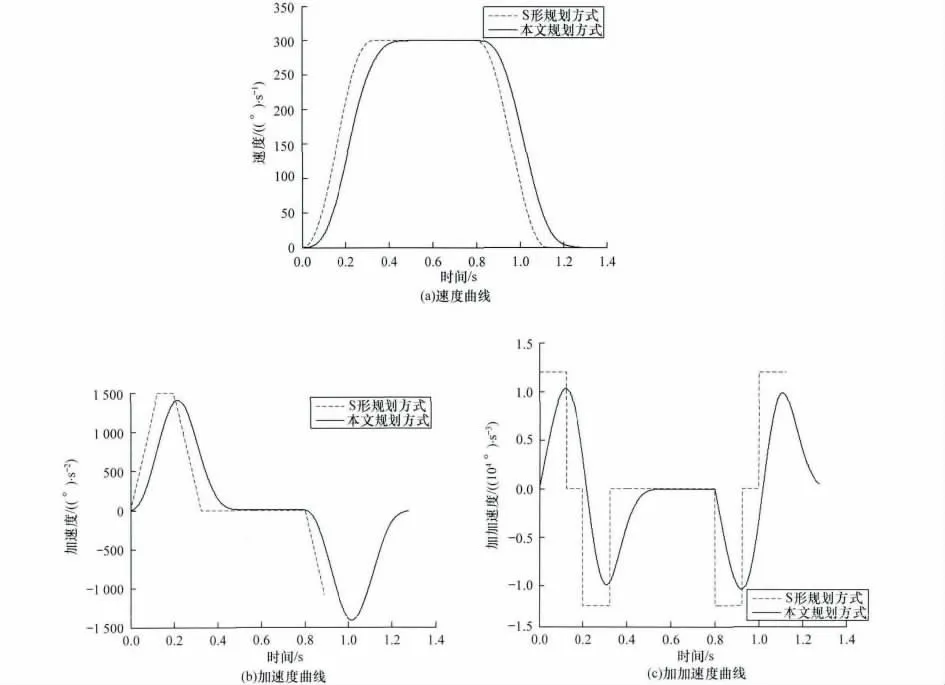
图12 第4 关节S 形速度曲线规划
通过以上4 个关节的时间对比可以看出,在各关节不同约束条件下,S 形速度曲线规划比指数函数速度曲线规划用时短,两者时间相差近似为固定值0.15 s,可以认为指数函数速度曲线规划方法和S形速度曲线规划方法运行时间接近,这种规划方法也是近似时间最优的。图13 给出指数函数曲线最后末端位移运动曲线,由此可知末端可以运动到给定目标点并且误差很小。从4 个关节图中的加速度曲线和加加速度曲线对比可以得出,指数函数速度曲线规划方法规划出的曲线明显要比S 形速度曲线平滑;S 形速度曲线规划方法其加加速度曲线会出现突变,而指数函数速度规划方法的加加速度曲线是连续平滑的。除此之外,指数函数速度曲线规划方法规划方法计算量小、公式简单,只需要控制2 个参数:增益α 和延时Td,即可确定规划的轨迹;而S形速度曲线的表达式是分段函数形式的,需要先计算各分段时间点和根据总的运动位移判断曲线由几段组成,计算量大,公式相对复杂[16]。因此,综合两者的性能比较可以确定,指数函数速度曲线规划方法比S 形速度曲线规划方法更有优势。
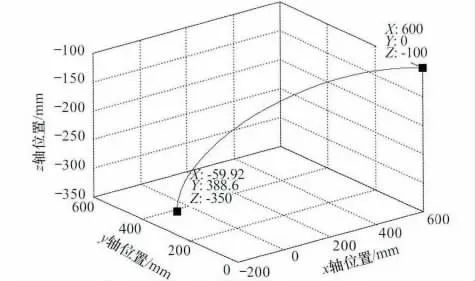
图13 末端位移曲线
6 结束语
在高速轻载机器人运动过程中,如果机器人运动轨迹的速度、加速度和加加速度曲线突变或者不连续将导致机器人运动过程中出现振动现象,这将严重影响机器人的使用寿命和对位精度。本文为此提出基于指数函数的速度轨迹规划方法,曲线轮廓和S 形速度曲线相似,但是加加速度却是连续、平滑的,而且本文方法和S 形曲线规划方法相比,具有公式简单、计算量小的优点,只需要控制2 个参数:时间增益α 和延时Td,即可确定规划轨迹。为了提高轨迹规划运算速度,可以离线计算3 次指数函数的运算,制作成一张表格供在线规划时查表。本文方法是针对SCARA 机器人的PTP 运动轨迹,不适用于需要规划连续运动轨迹的笛卡尔空间,因此,下一步的研究是将此方法扩展到笛卡尔空间连续运动轨迹中。
[1]Rivera G,Troncoso J R.Extending Tool-life Through Jerklimited Motion Dynamics in Machining Processes:An Experimental Study[J].Journal of Scientific & Industrial Research,2010,69:919-925.
[2]Piazzi A,Visioli A.Global Minimum-jerk Trajectory Planning of Robot Manipulators[J].IEEE Transactions on Industrial Electronics,2000,47(1):140-149.
[3]Rubio F J,Valero F J.Simultaneous Algorithm to Solve the Trajectory Planning Problem[J].Mechanism and Machine Theory,2009,44(10):1910-1922.
[4]李东结,邱江艳,尤 波.一种机器人轨迹规划的优化算法[J].电机与控制学报,2009,13(1):123-127.
[5]Gasparetto A,Zanotto V.A New Method for Smooth Trajectory Planning of Robot Manipulators [J].Mechanism and Machine Theory,2007,42(4):455-471.
[6]朱世强,刘松国.机械手时间最优脉动连续轨迹规划算法[J].机械工程学报,2010,46(3):47-52.
[7]刘松国.具有运动时间约束的机械手最优平滑轨迹规划[J].电机与控制学报,2009,13(6):897-902.
[8]肖文皓,白瑞林.基于信赖域算法的机械臂时间最优轨迹规划[J].传感器与微系统,2013,32(6):77-80.
[9]Janssens P,Pipeleers G,Swevers J.Energy-optimal Time Allocation of a Series of Point-to-Point Motions[C]//Proceedings of the 13th International Workshop on Research and Education in Mechatronics.Washington D.C.,USA:IEEE Press,2012:27-31.
[10]Kong Minxiu.Optimal Point-to-Point Motion Planning of Heavy-Duty IndustryRobot with Indirect Method[C]//Proceedings of IEEE International Conference on Robotics and Biomimetics.Washington D.C.,USA:IEEE Press,2013:768-773.
[11]Ding Han,Wu Jianhua.Point-to-Point Motion Control for a High-acceleration Positioning Table via Cascaded Learning Schemes[J].IEEE Transactions on Industrial Electronics,2007,54(5):2735-2744.
[12]朱 明,游有鹏,何 均.S 形加减速算法前瞻处理研究[J].小型微型计算机系统,2011,32(10):2140-2144.
[13]Haschke R.On-line Planning of Time Optimal,Jerklimited Trajectories[C]//Proceedings of International Conference on Intelligent Robots and Systems.Washington D.C.,USA:IEEE Press,2008:3248-3253.
[14]Mu Haihua,Zhou Yunfei,Yan Sijie,et al.Third-order Trajectory Planning for High Accuracy Point-to-Point Motion[J].Frontiers of Electrical and Electronic Engineering in China,2009,4(1):83-87.
[15]Zou Fengshan,Qu Daokui,Xu Fang.Asymmetric S-curve Trajectory Planning for Robot Point-to-point Motion[C]//Proceedings of IEEE International Con-ference on Robotics and Biomimetics.Washington D.C.,USA:IEEE Press,2009:2172-2176.
[16]何 均,游有鹏,陈 浩.S 形加减速的嵌套式前瞻快速算法[J].航空学报,2010,31(4):842-851.
[17]Ye Peiqing,Shi Chuan,Yang Kaiming,et al.Interpolation of Continuous Micro Line Segment Trajectories Based on Look-ahead Algorithm in High-speed Machining[J].International Journal of Advanced Manufacturing Technology,2008,37(9/10):881-897.
[18]Janssens P,van Loock W,Pipeleers G,et al.An Efficient Algorithm for Solving Time-optimal Point-to-Point Motion Control Problems [C]//Proceedings of Inter-national Conference on Mechatronics.Washington D.C.,USA:IEEE Press,2013:682-687.
猜你喜欢
当代水产(2022年6期)2022-06-29
新世纪智能(数学备考)(2021年9期)2021-11-24
新世纪智能(数学备考)(2021年9期)2021-11-24
新世纪智能(数学备考)(2020年9期)2021-01-04
新世纪智能(数学备考)(2020年9期)2021-01-04
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12