
考虑ARMA风速模型半直驱风电行星齿轮传动系统动力学分析
2015-12-18 01:16程言丽肖正明
机械与电子 2015年6期
程言丽,肖正明,张 威
(昆明理工大学机电工程学院,云南 昆明 650500)
Dynamic Analysis Considering Planetary Gears of Semi-direct Drive Wind Turbines Using the ARMA Windspeed Model
CHENG Yanli, XIAO Zhengming,ZHANG Wei
(Faculty of Mechanical and Electrical Engineering, Kunming University of Science and Technology, Kunming 650500,China)
考虑ARMA风速模型半直驱风电行星齿轮传动系统动力学分析
程言丽,肖正明,张威
(昆明理工大学机电工程学院,云南 昆明 650500)
Dynamic Analysis Considering Planetary Gears of Semi-direct Drive Wind Turbines Using the ARMA Windspeed Model
CHENG Yanli, XIAO Zhengming,ZHANG Wei
(Faculty of Mechanical and Electrical Engineering, Kunming University of Science and Technology, Kunming 650500,China)
摘要:针对半直驱风电行星齿轮系统的变速变载的特点,考虑风速变化引起的外部载荷激励,采用自回归-滑动平均(ARMA)方法建立模拟风速模型,在考虑时变啮合刚度、啮合阻尼等因素的基础上,采用集中参数法建立了行星齿轮传动系统平移-扭转耦合动力学模型。并采用四阶龙格-库塔法,求解1.5 MW半直驱风力发电行星齿轮传动系统的动态响应。
关键词:半直驱风电;行星齿轮动力学;集中参数法;动态响应;ARMA风速模型
0 引言
半直驱风电技术很好地集成了双馈式和直驱式风力发电机组的优点,同时合理地避开了这2种机组的不足。行星齿轮增速系统作为半直驱风机的核心部件,对能量传递和整机运行起到关键作用。风力发电机经常承受无规律的变载荷风力作用和恶劣的气候条件,从而导致齿轮箱各部件易发生故障。因此针对半直驱风力发电机,对其增速系统的动态特性进行研究,对于提高其运行的安全稳定性,延长设计寿命,降低故障率具有较好理论意义和工程价值。
国内外学者对风电行星齿轮增速箱的动力学性能分析做了广泛的研究。众多学者[1-3]考虑时变啮合刚度、啮合阻尼、啮合误差和齿侧间隙等因素,对行星齿轮系统进行动力学分析,求解行星齿轮系统的动态响应。如何考虑风速得到齿轮系统实际运行时的输入转速和转矩,对于风电齿轮系统的研究很重要[4-5]。现有的研究多是针对直驱式和双馈式风力机的齿轮系统,对于半直驱风电的研究[6-7]不多。
在此,建立了风速模型,以及行星齿轮传动系统平移-扭转耦合动力学模型,对1.5 MW半直驱风力发电行星齿轮传动系统进行动态响应分析,为半直驱风电的噪声和振动的进一步研究打下基础。
1 系统动力学模型
建模时有如下假设:系统的运动在同一平面XY内;将系统看做是由刚体与弹簧组成的集中质量系统的振动;3个行星轮沿中心轮周围均匀分布,具有相同的物理和几何参数;啮合刚度近似为正弦波周期变化。在上述假设下采用集中参数法,建立2K-H的行星齿轮传动系统的动力学模型。
在图1中建立3个坐标系:OXY为固定坐标系;与系杆固连并随系杆以其理论角速度ωc等速旋转的系杆动坐标系Oxy。坐标系OnXnYn是与系杆固连并随系杆一起等速旋转的坐标系,其原点位于第n个行星轮的理论中心On,其两坐标轴与坐标系Oxy的两坐标轴分别平行。

图1行星齿轮系统平移-扭转耦合模型
如图1,每个构件的运动都由3个自由度表示:2个平动和1个转动。各个构件通过弹簧连接在一起,各弹簧均与一阻尼相并联。将所有构件简化为集中质量刚体其质量用m表示(ms,mc,mr,…,mn),下角标s表示太阳轮,c表示行星架,r表示内齿圈,n取(1,2,3),分别表示第N个行星轮;各齿轮的基圆半径为r(rs,rr,…,rn);2个平移自由度方向为x和y(xs,xc,xr,xn,ys,yc,yr,yn),转动自由度方向为绕O点逆时针转动的u(us,uc,ur,un);
系统的动力学方程为:

(1)
M,C,K分别为系统质量矩阵、阻尼矩阵和刚度矩阵。
系统的广义坐标为:
(2)
系统动力学方程组为:
(3)
其中,n=1,2,3。
太阳轮相对于行星轮的位移沿啮合线方向投影为:
(4)
行星轮相对于内齿圈的位移沿啮合线方向投影为:
(5)
行星轮与行星架切向相对位移为:
(6)
行星轮与行星架径向相对位移为:
(7)
(8)
(9)
αs,αr分别为太阳轮和内齿圈的压力角;ksn,krn分别为太阳轮与行星轮之间、齿圈与行星轮之间的啮合刚度;ks,kc,kr,kp分别为太阳轮、行星架、齿圈和行星轮的支撑刚度;ψ为行星轮的相位,取ψ1=0,ψ2=2π/3,ψ3=4π/3。
2 齿轮传动系统激励
2.1随机风速引起的外部激励
风力发电机行星齿轮传动系统的外部激励是引起系统振动的主要原因,风速的随机性造成输入转矩的随机性,故建立能正确反映实际风速特性的风速模型对于风电传动系统的动态分析非常重要。为此,采用自回归-滑动平均(ARMA)方法,建立具有VonKarman功率谱密度特性的风速模型。表达式为:
(10)

由于风速的湍流分量服从均值为零的高斯分布,故可利用零均值高斯白噪声作为风速序列的误差信号,建立具有图2特定功率谱密度的ARMA模型。图3为求得的模拟风速。
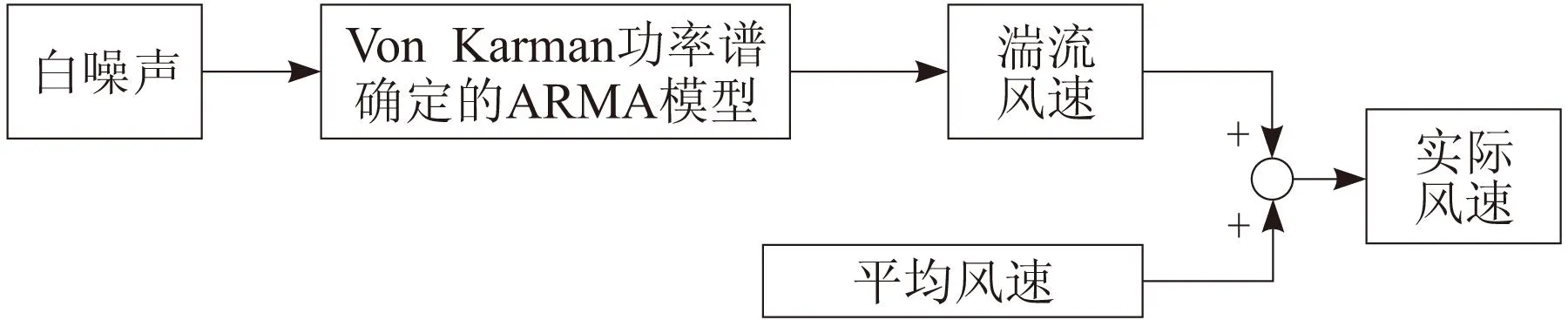
图2 ARMA风速模型原理

图3 模拟风速
风力机行星齿轮传动系统的输入功率为:
(11)
P为系统输入功率;Cp为风能利用效率;ρ为空气密度;v为风速;D为风轮直径;η1为发电机效率;η2为传动装置效率。
风轮的直径为80m,风轮设计转速为26.87r/min,风场平均风速为15r/min,空气密度为1.25kg/m3,风能利用系数为0.43,发电机效率为97%,增速装置效率为98%。将风速引起的转矩波动作为行星齿轮传动系统的外部激励,则该系统的输入转矩和输出转矩表示为:
(12)
(13)
2.2时变啮合刚度引起内部激励
在齿轮副的连续运动中,由于啮合过程中发生1对齿啮合和2对齿啮合的交替,故齿轮副的啮合刚度随时间发生周期性变化。时变啮合刚度用正弦函数表示,即
(14)
(15)

2.3啮合阻尼
陀螺矩阵G为18阶反对称矩阵,其中非零元素为G12=-G12=-2mc,G45=- G54=-2mr,G78=-G87=-2ms,G7+3n,8+3n=- G8+3n,7+3n=-2mp(n=1,2,3)。
(16)
3 动态响应
研究对象为1.5 MW半直驱风力发电行星齿轮传动系统,设计参数为:额定功率为1.5 MW,太阳轮齿数为za=22,行星轮齿数为zc=41,内齿圈齿数为zb=104,行星轮个数为3个,模数为11。行星齿轮传动比i=5.727。取10 s外部载荷输入扭矩进行求解,如图4所示。

图4 10 s外部载荷输入扭矩
对动力学方程进行降级处理,该行星齿轮传动系统的微分方程由原来的18个自由度2阶微分方程组,转换为36自由度1阶微分方程组,由四阶Runge-Kutta法可以求得系统的动态响应。
可将动力学方程写成如下矩阵形式:
(17)

(18)
各构件振动位移响应曲线如图5~图7所示。>图中负值表示构件振动方向与动力学模型中的物理坐标正向相反。
该齿轮系统的啮合频率为:
(19)
求得ωm为26 Hz。
由图5~图10可知:
a.由于行星齿轮传动系统输入的外部转矩为旋转方向上的转矩载荷,因此系统平移方向上的位移响应受外部载荷激励影响较小,故取各构件的扭转振动位移曲线分析。系统各构件的扭转振动与图4输入扭矩变化趋势相似,行星架的扭转位移受外部>载荷影响最大与扭矩变化趋势相似度最大如图6所示。

图5 太阳轮扭转振动位移响应曲线

图6 行星架扭转振动位移响应曲线
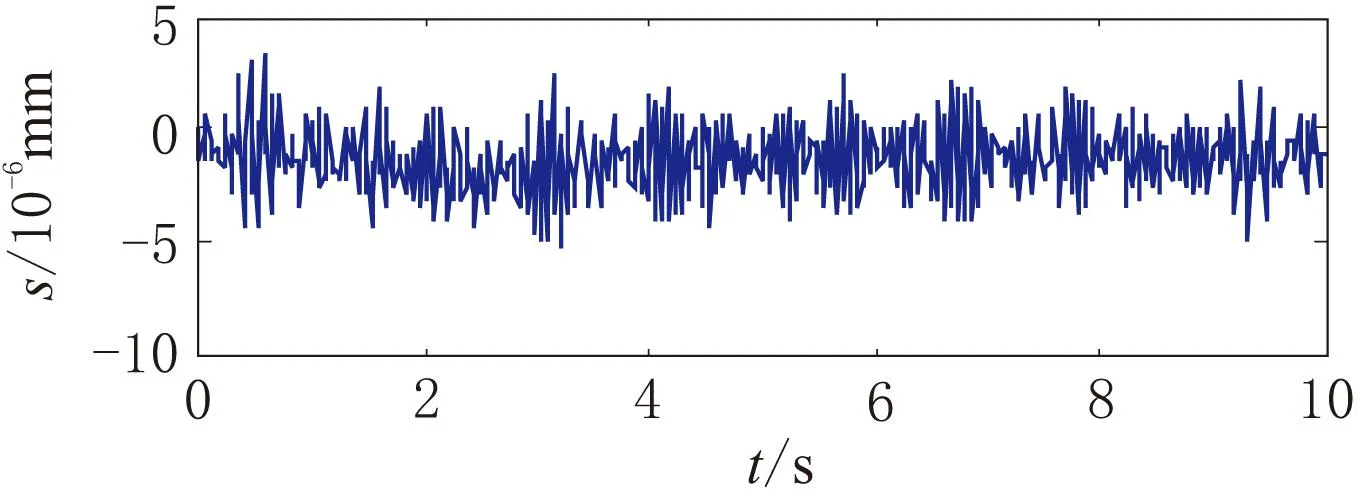
图7 行星轮扭转振动位移响应曲线

图8 行星轮振动位移频率

图9 行星架振动位移频率

图10 太阳轮振动位移频率
b.由频谱图8~图10可知,振动位移的响应频率具有明显的低频成分2Hz及10倍频261Hz,太阳轮频率中还有3倍频83Hz和420Hz较明显,说明太阳轮的频谱除了体现啮合频率,还体现了部分结构频率。
4 结束语
采用自回归-滑动平均(ARMA)方法模拟风速,获得由随机风速引起的传动系统输入变载荷激励,并考虑时变啮合刚度等建立半直驱风力发电行星齿轮增速系统的平移-扭转动力学模型,求得各构件的振动位移响应和系统的响应频率,得到结论:
a.各构件的扭转位移受外部载荷激励影响较大,与外部输入转矩载荷激励变化趋势相似。
b.由于外部风载激励是低频变化的,故半直驱风电增速系统的响应频率中低频成分较明显。
参考文献:
[1]AmbarishaVK,ParkerRG.Nonlineardynamicsofplanetarygearsusinganalyticalandfiniteelementmodels[J].JournalofSoundandVibration, 2007, 302(2):577-595.
[2]GuoYichao,ParkerRG.Purelyrotationalmodelandvibrationmodesofcompoundplanetarygears[J].MechanismandMachineTheory, 2010, 45(3):365-377.
[3]EricsonTM,ParkerRG.Planetarygearmodelvibrationexperimentsandcorrelationagainstlumped-parameterandfiniteelementmodels[J].JournalofSoundandVibration, 2013,332(9):2350-2375.
[4]田苗苗.兆瓦级风力发电机齿轮传动系统在变风载下的动力学特性研究[D].重庆:重庆大学,2010.
[5]李超.变风载下变速风力发电机传动系统的可靠性评估与动力学特性研究[D].重庆:重庆大学,2011.
[6]周志刚,秦大同,杨军,等.变载荷下风力发电机行星齿轮传动系统齿轮-轴承耦合动力学特性[J].重庆大学学报,2014,35(12):7-14.
[7]秦大同,杨军,周志刚,等.变载荷激励下风电行星齿轮系统动力学特性[J].中国机械工程,2013,24(3):295-301.
Abstract:Due to the variable speed and variable load characteristics of semi-direct drive wine turbines, external load excitation caused by variable speed is considered and a simulated wind speed model is set up using the Auto-Regressive and Moving Average Model (ARMA). A translational-rotational coupling dynamic model of the planetary gears transmission system is established using the lumped-parameter method, which considers the time-varying mesh stiffness and mesh damping. The Runge-Kutta method is used to derive the vibration dynamic response to the 1.5 MW semi-direct drive wind turbine system and according which the vibration performance is analyzed.
Key words:semi-direct drive wind power;planetary gears dynamics;lumped-parameter method;dynamic response;ARMA speed model
作者简介:程言丽(1989-),女,安徽淮北人,硕士研究生,研究方向为齿轮动力学;肖正明(1982-),男,副教授,江西吉安人,研究方向为机械系统动力学、振动噪声分析与控制等,通信作者。
基金项目:云南省自然科学基金项目(2013FB014) ;云南省教育厅重点项目(2013Z124);高校人才启动基金(KKSY201201125)
收稿日期:2015-03-24
文章编号:1001-2257(2015)06-0030-04
文献标识码:A
中图分类号:TH132.41
