外骨骼机器人的研究现状及发展趋势
2015-12-20 10:01赵新华侍才洪张西正
医疗卫生装备 2015年1期
邢 凯,赵新华,陈 炜,侍才洪,郭 月,张西正
外骨骼机器人的研究现状及发展趋势
邢 凯,赵新华,陈 炜,侍才洪,郭 月,张西正
阐述了外骨骼机器人的研究意义及国内外研究现状,重点介绍了几款具有代表性的外骨骼机器人,并对其基本性能参数进行了分析。详述了当前外骨骼机器人在设计研制过程中的关键技术,其中包括外骨骼机器人的上肢结构设计、传感系统及人机智能控制系统,并列举出对应的典型代表。最后,对外骨骼机器人的发展前景进行了展望。
外骨骼;机器人;人机结合
0 引言
近20 a来,外骨骼机器人作为一款辅助人体康复的装备得到了广泛的应用。民用领域方面,外骨骼机器人可以帮助老年人正常行动;医疗领域方面,外骨骼机器人在辅助残疾人正常生活的同时,也大大减轻了医务人员的工作压力;军事领域方面,外骨骼机器人可以提高战场的救援效率,帮助更多的受伤人员。由于外骨骼机器人在各领域发挥的巨大作用,使得其发展前景十分广阔[1]。
1 外骨骼机器人的国内外研究现状
目前,大多数国家的科研机构对外骨骼机器人的研究都处于基础起步阶段,比较领先的国家主要是美国和日本。法国、俄罗斯、韩国等也在外骨骼机器人技术上有所建树。而我国对外骨骼机器人领域的探索比较晚,但随着外骨骼机器人在社会上的需求量不断增大,我国国家自然科学基金、863和科技支撑计划等也逐渐开展了相应的研究[2]。
1.1 国外的研究现状
20世纪60年代,美国通用电气公司首次提出并开展了关于增强人体机能的增力型外骨骼机器人的探索。经过不懈努力,终于研制出最早的可佩带的单兵装备—哈迪曼(Hardiman)(如图1所示)。这个项目的研究初衷是为了缓解士兵因执行负重远距离任务而产生的疲劳,但是由于是外骨骼机器人的探索初期,它的体积巨大且笨重,安全性不高,未能取得理想的结果[3]。
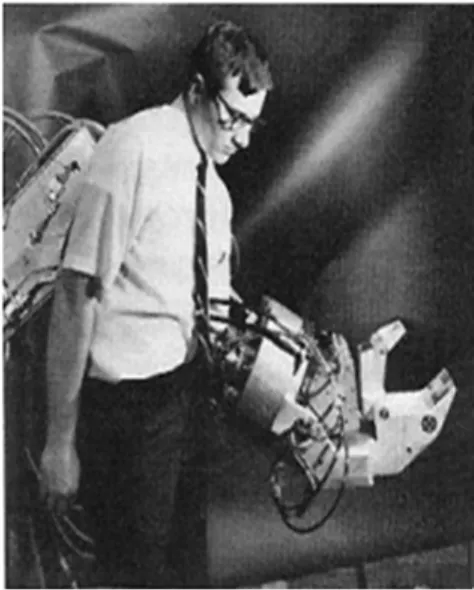
图1 Hardiman外骨骼机器人
美国加州大学伯克利分校人机工程实验室于2004年研发出一种下肢外骨骼机器人(Berkeley lower extremity exoskeleton,BLEEX),如图2所示。它包括1个背包式的外架、2条机械腿及相关的液压驱动装置。其中机械腿的结构采用类人化设计,包括了髋部、大腿、膝部、小腿、脚踝等,这样使得外骨骼机器人与穿戴者能够精确地连接在一起,使穿戴者行动更加舒适。BLEEX外骨骼机器人的每条机械腿都设计为7个自由度,其中机械髋关节有3个自由度,机械膝关节有1个自由度,机械脚踝处有3个自由度,被驱动的自由度只有4个。BLEEX外骨骼的整体质量约为45 kg,穿戴者身着此装备,即使在负重35 kg的情况下,仍然可以活动自如[4]。
洛克希德·马丁公司联合加州大学伯克利分校共同推出了一款军用下肢外骨骼机器人,并命名为HULC(human universal load carrier),如图3所示。HULC的质量约为32 kg,主要是由电池、驱动模块、控制模块、执行模块等构成。它不仅在液压系统的设计上更加合理高效,而且在机械腿的结构设计上也更加符合人体运动特点,满足了士兵对灵活机动性和稳定支撑性的需求[3]。

图2 BLEEX外骨骼机器人

图3HULC外骨骼机器人
2013年6月,美国哈佛大学设计研发出一款机械外骨骼,并命名为机器护甲(Exosuit),如图4所示。它采用的柔性化设计,不仅能够使穿戴者的下肢摆脱刚性材料的束缚,能够更加自然地弯曲,而且能让穿戴者承受更重的载荷。该机械外骨骼装备是一款管型材料护甲,总质量仅有7.5 kg,比一般的外骨骼机器人都要轻,这可能使其成为迄今为止穿戴最舒服的外骨骼机器人。
2011年,法国某防务公司与法国武器装备总署公布了其联合研制的可穿戴式外骨骼,并命名为“大力神”(HERCULE)(如图5所示)。该机械外骨骼不仅可以应用于增强普通人体的负重能力,而且可以增强士兵的作战持久力。它的机械结构主要是2条机械腿和背部水平支架,缓解了士兵执行负重远距离任务所带来的伤害和疲劳。该外骨骼不仅适合军事应用,也适合民用及医疗应用等领域[5-6]。

图4 机器护甲

图5 “大力神”外骨骼机器人
2009年10月,俄罗斯宣布斥资3 500万美元研制外骨骼机器人,命名为勇士-21(如图6所示)。它主要是由背包式外架、2条金属腿等构成。该外骨骼的研制目标主要是为了军事应用。“勇士-21”外骨骼机器人的优势在于它的金属材料部件全部采用纳米技术,比其第一代外骨骼装备在质量上减轻了14 kg。这不仅提高了士兵的机动性和灵活性,更是减少了电池的消耗,从而延长了它的使用时间[7]。
日本神奈川理工大学(Kanagawa University of Technology)研制的可穿戴助力外骨骼(Power Assist Suit,PAS)于1991年问世(如图7所示)。这款可穿戴助力外骨骼是一款全身外骨骼机器人,包括了机械肩、机械臂、躯干、腰部和机械腿等类人结构,质量约为30 kg。实验证明,它可以增加普通人体力量的0.5~1倍,并已经达到了让医护人员更加方便地照顾残疾人的目的[8]。

图6 勇士-21外骨骼机器人

图7 日本神奈川理工大学PAS

图8 HAL-5外骨骼机器人
日本筑波大学Cybernics实验室于2002年研发出一款穿戴型助力机器人,并命名为HAL(Hybrid Assistive Leg)。该装备的研究目标是帮助年迈者及残疾人进行正常的运动。3 a之后,HAL已经发展到第5代产品HAL-5,如图8所示。该外骨骼机器人不仅可以用于加强正常人体的运动能力,还可以用于辅助有伤病的残疾人进行正常行走。HAL-5的质量约为15 kg,它的整个系统可以承受140~220 kg的重物。HAL-5系统配备较多的传感器,其中角度传感器、肌电传感器、压力传感器等元件可以实时地获取外骨骼人机系统的运动信息,然后发送给处理器,经过处理后的信息通过驱动电动机使各个执行元件运动。HAL-5将驱动装置、测量装置、动力装置等全部都集成在背包中,使整个装备紧凑方便,更好地辅助了穿戴者的运动[8]。
1.2 国内研究现状
2004年,海军航空学院开展了关于外骨骼技术的研究,并于2006年首次推出了第一代外骨骼机器人(如图9所示),2 a之后又展示了第二代外骨骼机器人,如图10所示。该装备以电池为能量来源,通过安置于足底的压力传感器收集步态信息,然后通过微处理器发出信息驱动电动机输出动力,从而实现了穿戴者的负重行走[9]。
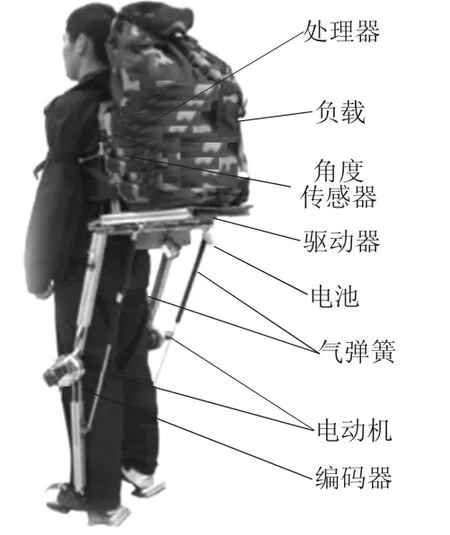
图9 第一代外骨骼机器人

图10 第二代外骨骼机器人
中国科学院自2004年开始就外骨骼机器人的研究开展工作,经过不懈的努力终于研制出了一种下肢外骨骼机器人,如图11所示。该系统在单条机械腿上配置了6个自由度(机械髋关节3个,机械膝关节1个,机械踝关节1个,足底1个),它采用电池为能源,并且在外骨骼架上安装了多种传感器和编码器,通过这些感知系统装置获取人体的运动信息,最后采用伺服电动机驱动方式协调并辅助穿戴者运动[10]。
除此之外,哈尔滨工业大学开展了关于康复训练的外骨骼机器人的研究;上海大学和浙江大学也分别研制出了不同用途的下肢外骨骼机器人;清华大学、陆军第二炮兵学院、中科院合肥智能研究所、东南大学、海军航空工程学院、南京理工大学、上海大学、浙江大学、哈尔滨工业大学、东南大学、中国科学技术大学等科研单位也逐渐开始了外骨骼机器人技术的研究[11]。

图11 中科院外骨骼机器人
2 外骨骼机器人的关键技术分析
外骨骼机器人是一种可穿戴式的机电智能机器人,为了能让外骨骼机器人发挥最大的作用,对其关键技术的分析研究是必不可少的。
2.1 外骨骼机器人的上肢结构
为了让外骨骼机器人与穿戴者之间实现良好的运动耦合性,在进行机械结构部分的设计与分析时,应该充分考虑到安全、轻便、灵活、舒适等因素[12]。
外骨骼机器人下肢基本上都采用了拟人化的设计思想,方便于后背承载负重,但不适合搬运位于穿戴者前方的物体,这给穿戴者的工作带来了很多困难。针对这一情况,外骨骼机器人的上肢应运而生。但是对于外骨骼机器人上肢的设计,各个国家都有不同的结构设计思路。一种认为外骨骼机器人上肢也要与穿戴者的身体进行直接接触,应尽量采用拟人化的设计思路,这样才能使外骨骼机器人具有很好的可穿戴性,如图12、13所示。另一种则认为外骨骼机器人应该在保证完成任务的前提下,尽量简化上肢的机械机构,这样不仅可以降低设计难度,更节省了财力物力,如图14所示[13]。

图12 HAL-5外骨骼机器人上肢

图13 XOS外骨骼机器人上肢

图14 HULC外骨骼机器人上肢
2.2 传感系统
为了能够准确地获得穿戴者的运动信息,外骨骼机器人需要一个人机交互系统,这就是传感系统。一个完整的传感系统是由各类不同的传感器组成的,外骨骼机器人正是通过它们才能对穿戴者的运动信息进行全面识别[14]。
美国BLEEX外骨骼机器人在其机械腿上装配了40多个传感器,其中包括了压力传感器和陀螺仪等,这些传感器实时地检测和分析人体的运动信息,保证了外骨骼机器人与穿戴者的协调配合[15]。日本HAL-5的传感系统主要由压力传感器和生物电信号传感器组成,它的特点在于可以依靠穿戴者的肌电信号来控制动力装置。而我国在外骨骼机器人的传感系统上也做了相应研究。中科院合肥智能研究所研制的外骨骼机器人也分别在足底和连杆装配了一维和三维力传感器,通过测量力的大小来对人体的运动进行预判[16]。中国科学技术大学研制的外骨骼机器人的传感系统包括:力传感器、加速度传感器和角度传感器。其中力传感器用来测量地面对人机系统的反作用力,角度传感器用于测量关节的转动角度[17]。
参考以上外骨骼机器人的传感系统,本课题组也做了相应的工作[18],并设计出一种由压力传感器和倾角传感器组成的传感系统。压力传感器选用的是美国Tekscan公司生产的薄膜压力传感器A401,如图15所示。将6个压力传感器分别置于左右传感靴底部,用于测量足底压力。倾角传感器选用的是瑞芬科技有限公司生产的LCA320倾角传感器,如图16所示,将4个倾角传感器分别置于左右腿的大腿和小腿部分,用于测量角度变化。

图15 A401薄膜压力传感器
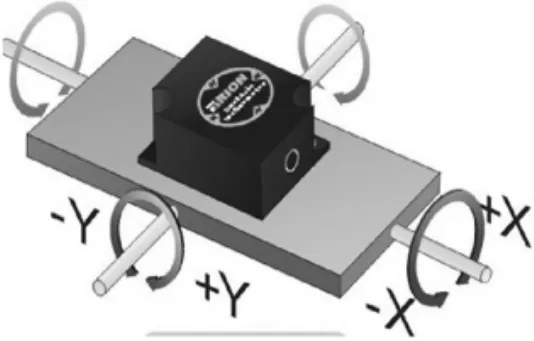
图16 LCA320双轴倾角传感器
2.3 人机智能控制系统
外骨骼机器人区别于其他机器人的最大特点是人机交互。这不仅需要它的机械结构与穿戴者之间的交互性要好,而且还要求控制系统能快速、准确地反应穿戴者的运动。根据智能系统的综合一体化思想,可以将控制系统从感知、决策及执行3个方面加以考虑。
感知层面的主要功能是收集生理信息和物理信息等。日本HAL系列的外骨骼机器人通过肌电传感器采集皮肤的生理信息来控制穿戴者运动,而通过压力传感器、倾角传感器测量重力、角速度和角加速度等物理信息。当遇到一些比较复杂的问题时,就需要外骨骼机器人和穿戴者共同协调解决,这就涉及到了决策层面,它的模式通常可以分为人主机辅、机主人辅和人机协调3种。执行层面指的是执行机构接受到从决策层面传来的信号,最终完成对人体运动的辅助功能[19]。
人机智能控制系统通过以上3个层面就可以快速准确地反应穿戴者的运动信息,从而实现人机协调控制。
3 结语
伴随着生物技术、机电液一体化技术、控制方法技术等的不断融合和发展,外骨骼机器人技术也在不断成熟。以外骨骼机器人为基点,可以将其技术扩展到很多领域。例如,用于康复机器人的研发,可以帮助病患尽快恢复健康;用于假肢的研究,可以使残疾人像正常人一样生活。
通过对外骨骼机器人的机械结构进行改进,使其实现对人体运动零干涉的目标。对外骨骼机器人的控制系统进行优化,建立合适的运动趋势预测机制和自主适应学习机制。相信不久的将来,外骨骼机器人必将为人们提供更好的服务[20]。
[1]尹军茂.穿戴式下肢外骨骼机构分析与设计[D].北京:北京工业大学,2010.
[2]李会营,王惠源,张鹏军,等.外骨骼机器人发展趋势研究[J].机械工程师,2011(8):9-10.
[3]KazerooniH.Humanaugmentationandexoskeletonsystems in Berkeley[J].International Journal of Humanoid Robotics,2007,4(3):575-605.
[4]Kazerooni H,Steger R,Li H.Hybrid control of the Berkeley lower extremity exoskeleton(BLEEX)[J].The International Journal of Robotics Research,2006,25(5):561-573.
[5]丁兆义.外骨骼机器人的设计和控制系统研究[D].沈阳:东北大学,2008.
[6]张凯.单兵外骨骼结构与动力分析[N].科技创新导报,2011-05-09(13).
[7]方郁.可穿戴型下肢助力机器人动力学建模及其控制研究[D].合肥:中国科学技术大学,2009.
[8]陈浩.外骨骼机器人设计[D].上海:上海交通大学,2012.
[9]归丽华,杨智勇,顾文锦,等.能量辅助骨骼服NAEIES的开发[J].海军航空工程学院学报,2007,22(4):467-470.
[10]陈峰.可穿戴型助力机器人技术研究[D].合肥:中国科学技术大学,2007:21-34.
[11]柯显信,陈玉亮,唐文彬.人体下肢外骨骼机器人的发展及关键技术分析[J].机器人技术与应用,2009(6):28-32.
[12]尹军茂.穿戴式下肢外骨骼机构分析与设计[D].北京:北京工业大学,2010:13-40.
[13]赵彦峻,徐诚.人体下肢外骨骼设计与仿真分析[J].系统仿真学报,2008,20(17):4 756-4 759.
[14]张蕊,张佳帆,张文蔚.可穿戴式柔性外骨骼人机智能系统安全性设计评价[J].机电工程,2008,25(12):86-88.
[15]CHU A.Design of the Berkeley lower extremity exoskeleton(BLEEX)[D].Berkeley:University of Californnia,2005:16-32.
[16]丁学恭.机器人控制研究[M].杭州:浙江大学出版社,2006:56-90.
[17]田双太.一种可穿戴机器人的多传感器感知系统研究[D].合肥:中国科学技术大学,2011.
[18]柴虎.下肢外骨骼机器人跟随系统的研究[D].广州:南方医科大学,2013.
[19]Costa N,Bezdjeek M,Brown M.Joint motion control of a powered lower limb orthosis for rehabilitation[J].International Journal of Automation and Computing,2006,7(3):271-281.
[20]YANG C J,ZHANG J F,CHEN Y,et al.A review of exoskeletontype systems and their key technologies[J].Mechanical Engineering Science,2008,222(8):1 599-1 612.
(收稿:2014-06-06 修回:2014-09-12)
Research situation and development trend of robot exoskeleton
XING Kai1,ZHAO Xin-hua1,CHEN Wei1,2,SHI Cai-hong1,2,GUO Yue1,ZHANG Xi-zheng1,2
(1.School of Mechanical Engineering,Tianjin University of Technology,Tianjin 300384,China; 2.Institute of Medical Equipment,Academy of Military Medical Sciences,Tianjin 300161,China)
The significance and research situation of exoskeleton robots at home and abroad are introduced,focusing on several typical exoskeleton robots and the analysis of their basic parameters.The development of key technologies during the study of exoskeleton robots is also introduced,including the upper structure of mechanical design,sensor system and human intelligent control system,then some correspondingly typical models are listed.Finally,the prospect of exoskeleton robots is presented as well.[Chinese Medical Equipment Journal,2015,36(1):104-107]
exoskeleton;robot;human-computer cooperation
R318;TP242.6
A
1003-8868(2015)01-0104-04
10.7687/J.ISSN1003-8868.2015.01.104
国家自然科学基金资助项目(11302147,51275353);天津市高等学校科技发展基金计划项目(20100402);中国博士后科学基金项目二等(军队系统);天津市复杂系统控制理论及应用重点实验室资助项目
邢 凯(1988—),男,主要研究方向为机器人学,E-mail:150036 0956@qq.com。
300384天津,天津理工大学机械工程学院(邢 凯,赵新华,陈炜,郭 月,张西正);300161天津,军事医学科学院卫生装备研究所(陈炜,侍才洪,张西正)
张西正,E-mail:z56787@sohu.com
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代临床医学(2022年4期)2022-09-29
小哥白尼(野生动物)(2021年12期)2021-03-29
当代工人(2020年8期)2020-05-25
轻兵器(2019年5期)2019-06-21
小溪流(画刊)(2017年12期)2018-01-10
大众健康(2016年3期)2016-05-31
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
中国医疗美容(2015年2期)2015-07-19
中国医疗美容(2015年1期)2015-07-12