
拓展目标杂波概率假设密度估计
2015-12-26 05:59闫小喜韩崇昭李威连峰
西安交通大学学报 2015年1期
闫小喜,韩崇昭,李威,连峰
(1.江苏大学电气信息工程学院,212013,江苏镇江;2.西安交通大学电子与信息工程学院,710049,西安)
拓展目标杂波概率假设密度估计
闫小喜1,韩崇昭2,李威2,连峰2
(1.江苏大学电气信息工程学院,212013,江苏镇江;2.西安交通大学电子与信息工程学院,710049,西安)
针对拓展目标概率假设密度滤波器中的未知杂波概率假设密度,提出了杂波概率假设密度估计算法。算法利用有限混合模型极大后验估计杂波概率假设密度,取混合权重的熵分布作为混合参数的先验分布;在渐进假设条件下,利用拉格朗日乘子推导了混合权重的递进估计公式;在混合权重递进估计过程中,通过混合权重置零操作来实现对有限混合模型中混合分量的删减。以二维场景为例对算法进行了仿真实验,结果表明:在拓展目标概率假设密度滤波器高斯混合实现的框架内,所提杂波概率假设密度估计算法的跟踪性能接近真实杂波概率假设密度时的跟踪性能。
拓展目标跟踪;杂波概率假设密度;极大后验;熵分布
目标跟踪是对目标数目和目标状态进行估计。目前已有的目标跟踪算法大部分是基于这样一个基本假设:每个目标在每个时刻至多产生一个量测[1-3]。在一般分辨率目标跟踪系统中,目标尺寸相对于传感器分辨单元可以忽略不计,目标能够简化为一个点目标,一个点目标对应一个散射中心,“单散射中心”特征体现在量测上为“一个目标对应一个量测”,又考虑到传感器检测概率的因素,因此每个目标在每个时刻至多产生一个量测,该假设具有一定的合理性。
然而,随着现代传感器分辨率的不断提高,尤其以高分辨率雷达、相控阵雷达为代表的现代传感器的出现,“每个目标在每个时刻至多产生一个量测”的基本假设越来越不适用于现代高分辨率目标跟踪系统,因为在高分辨率目标跟踪系统中,目标尺寸一般大于传感器距离向分辨单元,每个目标具有多个散射中心,该“多散射中心”特征体现在量测上为“每个目标在每个时刻产生多个目标量测”。因此,在现代目标跟踪系统,目标跟踪应当是基于“每个目标在每个时刻产生多个量测”的拓展目标跟踪而非点目标跟踪[4]。目前关于拓展目标跟踪的研究主要集中在特定约束条件下的单拓展目标跟踪,如基于参考框架的单拓展目标序贯蒙特卡罗方法[5]、基于状态扩维的单拓展目标序贯蒙特卡罗方法[6]、随机矩阵描述的拓展目标跟踪方法[7]、基于泊松一致性似然的单拓展目标Bayesian方法[8]、单拓展目标的联合检测和估计误差[9]等。有关多拓展目标跟踪的研究较少,比较严谨的理论是Mahler在多目标Bayesian滤波器框架内利用随机有限集统计所推导的多拓展目标概率假设密度滤波器[10],该滤波器在拓展目标线性高斯假设条件下,具有线性高斯混合实现形式,能够实现对多拓展目标状态的估计[11-12]。拓展目标概率假设密度滤波器高斯混合实现的收敛性在文献[13]中进行了证明。
在拓展目标概率假设密度滤波器中,杂波概率假设密度作为拓展目标概率假设密度的重要组成部分,在实际跟踪系统中是未知的。然而,在已有的大部分拓展目标跟踪算法中,粗略地强制指定杂波概率假设密度,其描述的精确与否在一定程度上影响到拓展目标概率假设密度滤波器的跟踪性能。针对拓展目标概率假设密度滤波器中的未知杂波概率假设密度,本文提出了杂波概率假设密度估计算法,此算法能提高拓展目标概率假设密度滤波器的适用性。
1 问题描述
拓展目标概率假设密度滤波器的预测步为
(1)
式中:vk|k-1是拓展目标强度;pS,k是存活概率;fk|k-1是状态转移密度;βk|k-1是衍生转移密度;γk是拓展目标出生强度[10]。
拓展目标概率假设密度滤波器更新步[10]为
vk|k(x)=LZk(x)vk|k-1(x)
(2)
伪量测似然
(3)
式中:λ(x)是期望目标量测数;PD是检测概率;p∠Zk表示对量测集合Zk的分割;ωp是分割方式p在所有可能分割方式中所占的比重;W是量测分割单元;|W|表示分割单元W中量测数目;φz(x)=φ(z|x)是量测似然;λc是期望杂波数;ck(z)是杂波分布;分割单元因子
dW=δ|W|,1+
(4)
其中δ是Kronecker delta函数。
双重强度函数定义为
(5)
式(3)中的1-(1-e-λ(x))PD(x)表示对未检测到预测步拓展目标概率假设密度的保留,其余部分项表示对检测到预测拓展目标概率假设密度的更新。
(6)
式中:λ(x)φz(x)表示z作为目标量测时的目标量测强度;λcck(z)表示z作为杂波量测时的杂波量测强度。该比率值R是利用当前量测更新检测到预测拓展目标概率假设密度的关键,R作为更新因子能够体现出量测集合中量测的更新作用。在实际跟踪系统中,λ(x)、φz(x)与跟踪系统所选的传感器有关,可以视为已知量;表示杂波概率假设密度的参数λc、ck(z)与跟踪场景有关,是未知量。针对该未知的杂波概率假设密度,本文提出了拓展目标杂波概率假设密度估计算法,该算法可提高拓展目标概率假设密度滤波器在更新步的更新精度。
2 算 法
如问题描述部分所述,我们的目的是对未知的杂波概率假设密度进行估计,其中包括对期望杂波量测数目λc和杂波分布ck(z)的估计。
关于λc的估计,前k-1时刻杂波数目估计值的平均值作为k时刻杂波数目的估计值,即
(7)

算法利用有限混合模型对未知的c(z)进行估计(为表述简单,省略时刻标注k)
(8)
式中:m是混合分量数;πj是混合分量权重;θ是由均值μj、方差Pj构成的描述分量j的参数集合,θ={π1,…,πm,θ1,…,θm}。杂波量测集合Zc={z1,…,zn}的对数似然为
(9)
算法采用极大后验准则估计混合参数为
(10)
该混合参数的先验分布依赖于混合权重的熵分布[14],即
p(θ)∝exp(-H(π1,…,πm))
(11)

求πj在杂波量测集合Zc,i-1={z1,…,zi-1}下的极大后验估计时,令
(12)
(13)

(14)


(15)
将式(13)、式(15)代入到式(14),可得混合权重的递进估计关系为
(16)
式中
式(16)是超越方程,利用Lambert W函数[15]求解该方程得
(17)
在上述递进估计过程中,如果某一混合分量的混合权重为负值,则令该混合权重为0,使该混合分量不出现在对数后验密度的计算中,从而实现对该混合分量的删减,而且该混合分量不再出现在后续估计过程中。在混合权重的递进估计过程中,对非零混合权重所对应的混合分量的均值、方差采用文献[16]的递进估计方式进行。

3 仿真实验
以二维场景[-1 000,1 000]×[-1 000,1 000]为例,在拓展目标概率假设密度滤波器高斯混合实现框架内,证明所提算法在拓展目标跟踪上的有效性。拓展目标运动模型为
式中:xk=[x1,k,x2,k,x3,k,x4,k]T为拓展目标状态;[x1,k,x2,k]T为拓展目标位置;[x3,k,x4,k]T为拓展目标速度;过程噪声[v1,k,v2,k]T是零均值高斯白噪声,其分量标准差σv1=σv2=2 m/s2。拓展目标存活概率为0.99,拓展目标出生强度γk由两个加权高斯混合分量来表示,其中一个分量的参数权重为0.1、均值为[250,250,0,0]T、方差为diag([900,900,25,25]T);另一个分量的参数权重为0.1、均值为[-250,-250,0,0]T、方差为diag([900,900,25,25]T)。拓展目标衍生强度βk|k-1(x|ζ)=0.05N(x,ζ,Qβ),其中衍生方差阵Qβ=diag([100,100,400,400]T),原状态ζ到衍生状态x的衍生转移矩阵Fβ=diag([1,1,1,1]T),ζ到x的状态跳跃dβ=[0,0,0,0]T。
拓展目标单量测方程为
式中:量测噪声[w1,k,w2,k]T是零均值高斯白噪声,其分量标准差σw1=σw2=20 m。每个拓展目标在每个时刻产生的量测数服从参数为10的泊松分布,检测概率为0.99。
算法在有限混合模型初始化时,取混合分量数为50,算法的混合参数递进估计过程终止条件为对数后验密度的相对变化率低于10-4。算法在拓展目标概率假设密度滤波器高斯混合实现框架内进行验证,其参数设置与文献[11]相同。
拓展目标在一次蒙特卡罗实验中的x坐标和y坐标上的真实状态和目标量测如图1、图2所示,可以看出拓展目标的多量测特性。
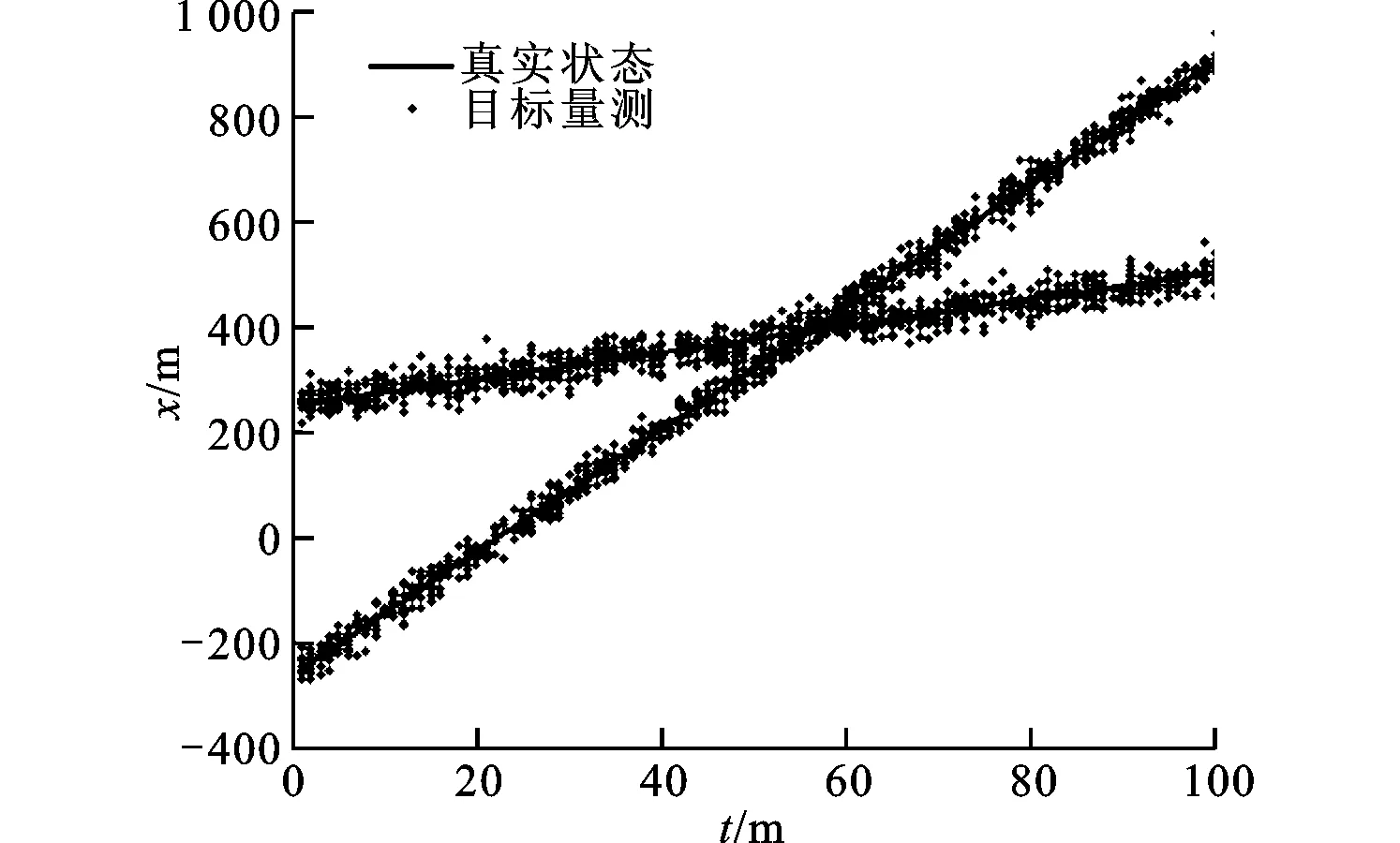
图1 x坐标的真实状态与目标量测

图2 y坐标的真实状态与目标量测
拓展目标真实轨迹和所提算法估计值如图3、图4所示。结果表明,所提算法在拓展目标概率假设密度滤波器高斯混合实现框架中能够实现对多拓展目标状态的有效估计。
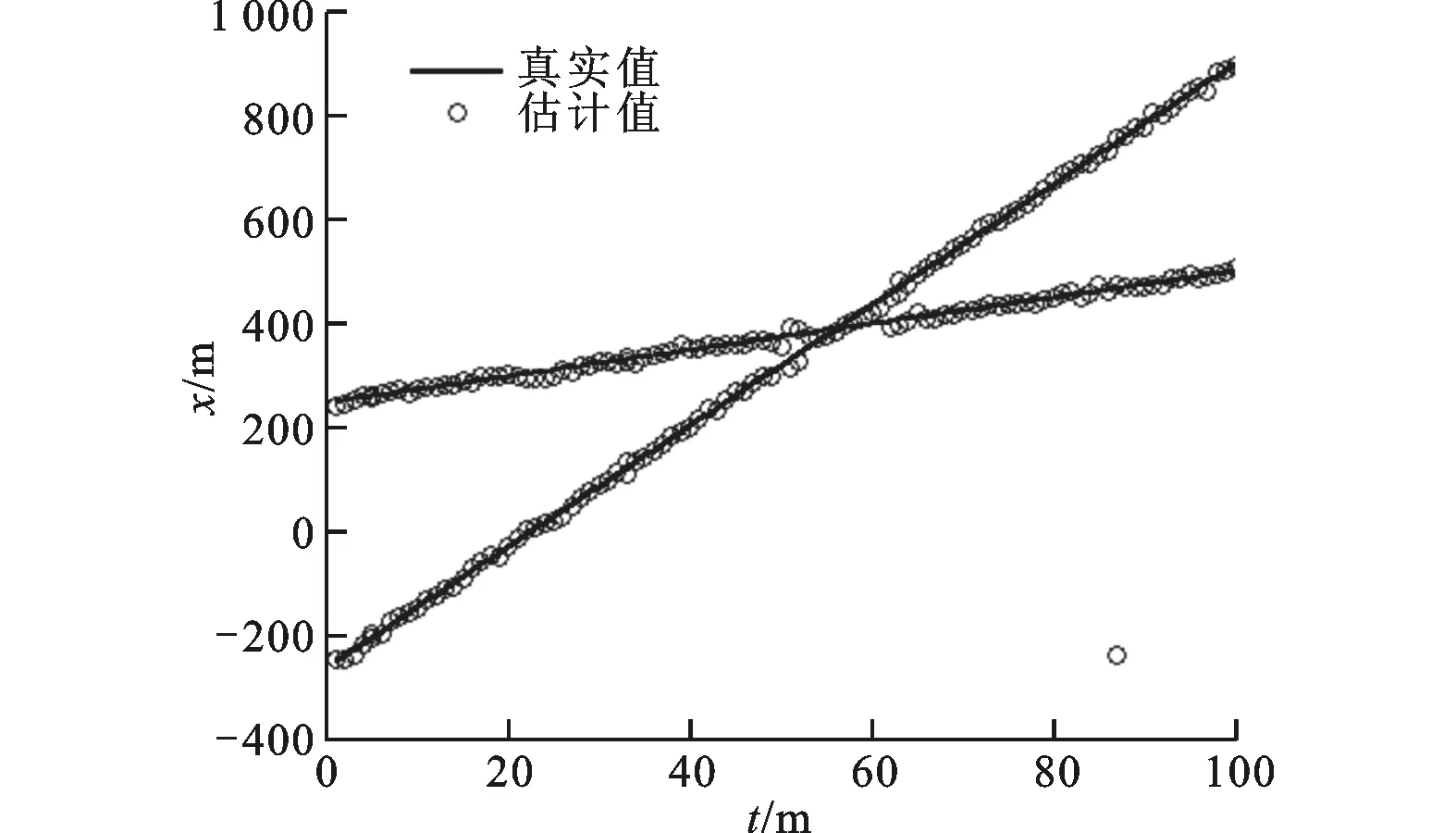
图3 x坐标的估计值与真实值
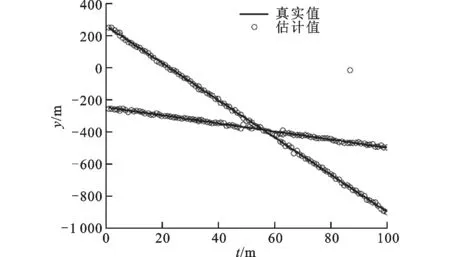
图4 y坐标的估计值与真实值


所提算法与使用真实杂波概率假设密度时的拓展目标数目估计效果如图6所示,可以看出,所提算法的目标数估计值在大多数时刻接近于真实杂波概率假设密度时的目标数估计值。
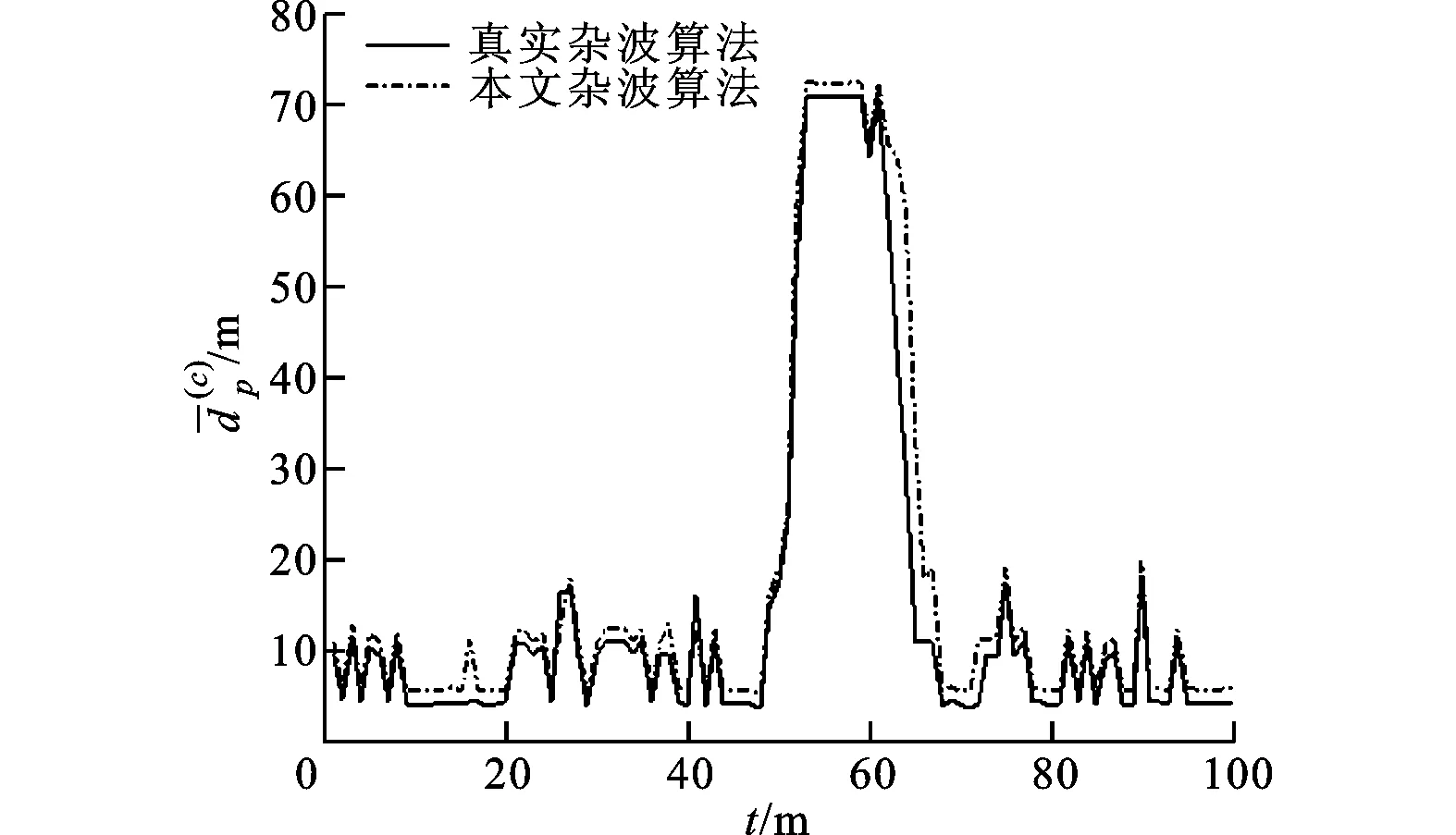
图5 平均OSPA

图6 平均目标数目
4 结 论
作为拓展目标概率假设密度滤波器强度更新因子中重要组成部分的杂波概率假设密度,在实际目标跟踪系统中是未知的。针对该未知杂波概率假设密度,本文提出了杂波概率假设密度的估计算法,算法利用有限混合模型实现对杂波概率假设密度的递进估计。仿真结果表明:所提算法能够实现对杂波概率假设密度的估计,跟踪性能接近真实杂波概率假设密度时的跟踪性能。
[1] PULFORD G E. Taxonomy of multiple target tracking methods [J]. IET Proceeding of Radar, Sonar and Navigation, 2005, 152(2): 291-304.
[2] BLACKMAN S, POPOLI R. Design and analysis of modern tracking systems [M]. Norwood, USA: Artech House, 1999.
[3] BAR S Y, LI Xiaorong. Multitarget-multisensor tracking: principles and techniques [M]. Storrs, USA: YBS Publishing, 1995.
[4] GILHOLM K, SALMOND D. Spatial distribution for tracking extended objects [J]. IEEE Proceedings of Radar, Sonar and Navigation, 2005, 152(5): 364-371.
[5] VERMAAK J, IKOMA N, GODSILL S J. Sequential Monte Carlo framework for extended object tracking [J]. IEEE Proceedings of Radar, Sonar and Navigation, 2005, 152(3): 353-363.
[6] ANGELOVA D, MIHAYLOYA L. Extended object tracking using Monte Carlo methods [J]. IEEE Transactions on Signal Processing, 2008, 56(2): 825-832.
[7] KOCH J W. Bayesian approach to extended object and cluster tracing using random matrices [J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042-1059.
[8] VO B T, VO B N, CANTONI A. Bayesian filtering with random finite set observations [J]. IEEE Transactions on Signal Processing, 2008, 56(4): 1313-1326.
[9] 连峰, 马东东, 韩崇昭. 扩展目标联合检测与估计的误差界 [J]. 西安交通大学学报, 2014, 48(4): 8-14. LIAN Feng, MA Dongdong, HAN Chongzhao. Error bound for joint detection and estimation for extended target [J]. Journal of Xi’an Jiaotong University, 2014, 48(4): 8-14.
[10]MAHLER R. PHD filters for nonstandard targets: I extended object [C]∥The 12th International Conference on Information Fusion. Piscataway, NJ, USA: IEEE, 2009: 915-921.
[11]GRANSTROM K, LUNDQUIST C, ORGUNER O. Extended target tracking using a Gaussian-mixture PHD filter [J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4): 3268-3286.
[12]韩玉兰, 朱洪艳, 韩崇昭, 等. 多拓展目标的高斯混合概率假设密度滤波器 [J]. 西安交通大学学报, 2014, 48(4): 95-101. HAN Yulan, ZHU Hongyan, HAN Chongzhao, et al. Gaussian-mixture probability hypothesis density filter for multiple extended targets [J]. Journal of Xi’an Jiaotong University, 2014, 48(4): 95-101.
[13]连峰, 韩崇昭, 刘伟峰, 等. 高斯混合扩展目标概率假设密度滤波器的收敛性分析 [J]. 自动化学报, 2012, 38(8): 1343-1352.
LIAN Feng, HAN Chongzhao, LIU Weifeng, et al. Convergence analysis of the Gaussian mixture extended-target probability hypothesis density filter [J]. Acta Automatica Sinca, 2012, 38(8): 1343-1352.
[14]吴刚, 韩崇昭, 闫小喜, 等. 基于熵分布的概率假设密度滤波器高斯混合实现 [J]. 控制与决策, 2014, 29(1): 89-93. WU Gang, HAN Chongzhao, YAN Xiaoxi, et al. Gaussian mixture implementation of PHD filter based on entropy distribution [J]. Control and Decision, 2014, 29(1): 89-93.
[15]CORLESS R M, GONNET G H, HARE D, et al. On the Lambert W function [J]. Advances in Computational Mathematics, 1996, 5(4): 329-359.
[16]ZIVKOVIC Z, HEIJDEN F V. Recursive unsupervised learning of finite mixture models [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2004, 26(5): 651-656.
[17]SCHUHMACHER D, VO B T, VO B N. A consistent metric for performance evaluation of multi-object filters [J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3447-3457.
(编辑 赵炜)
Estimation of Clutter Probability Hypothesis Density in Extended Objects
YAN Xiaoxi1,HAN Chongzhao2,LI Wei2,LIAN Feng2
(1. School of Electrical and Information Engineering, Jiangsu University, Zhenjiang, Jiangsu 212013, China; 2. School of Electronics and Information Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
An algorithm to estimate the clutter probability hypothesis density is proposed to deal with unknown clutter probability hypothesis densities in extended object probability hypothesis density filter. A finite mixture model is applied in estimating clutter probability hypothesis density with maximum a posterior estimation, and the entropy distribution of mixed weights is regarded as the prior distribution of mixing parameters. A recursive estimation formula of mixed weights is derived by using Lagrange multiplier under an approximation assumption. Mixture components of the finite mixture model are pruned by setting corresponding mixed weights to zeros in the recursive estimation procedure. Simulation results in a two-dimensional scenario show that the tracking performance of the proposed algorithm is close to the ground truth in Gaussian mixture implementation of extended object probability hypothesis density filter.
extended object tracking; clutter probability hypothesis density; maximum a posterior; entropy distribution
2014-04-18。
闫小喜(1981—),男,博士,讲师。
国家自然科学基金资助项目(61304261);江苏大学高级人才启动基金资助项目(12JDG076)。
10.7652/xjtuxb201501015
TP274
A
0253-987X(2015)01-0092-05
猜你喜欢
科学与信息化(2021年30期)2021-12-24
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
火控雷达技术(2016年2期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
电影故事(2015年16期)2015-07-14
遥测遥控(2015年2期)2015-04-23
