基于虚拟同步发电机的离网型三相逆变器控制研究*
2016-01-28 09:43李浩然杨旭红
电机与控制应用 2015年12期
关键词:转动惯量
李浩然, 杨旭红
(上海电力学院 自动化工程学院,上海市电站自动化技术重点实验室,上海 200090)
基于虚拟同步发电机的离网型三相逆变器控制研究*
李浩然,杨旭红
(上海电力学院 自动化工程学院,上海市电站自动化技术重点实验室,上海200090)
摘要:针对传统三相逆变器控制,在借助虚拟同步发电机二阶暂态数学模型的基础上,利用电容电压和电容电流反馈,与虚拟同步发电机构成功率-电压-电流三环控制。其中,电容电压环采用比例积分控制,保证稳态无误差;并使控制系统具有下垂特性,以及同步发电机转子惯性的特性,提高频率的稳定性。在分析虚拟同步发电机原理的基础上,详细分析了电压电流双环控制参数的整定和等效输出阻抗的计算。利用小信号分析法,详细分析了转动惯量、有功系数和无功系数对系统稳定性的影响。最后由仿真结果表明所提策略的正确性和有效性。
关键词:虚拟同步发电机; 三相逆变器; 双环控制; 转动惯量
0引言
新能源如太阳能、风能等受到越来越多的关注,以其清洁无污染和蕴含量极其丰富等特点,不断为各国所利用和研究。由于绝大多数分布式能源都要通过逆变器接入电网,因此,逆变器控制技术是分布式能源能否高效实施和利用的一个非常重要的技术[1]。
目前,逆变器控制技术发展迅猛,在直接电流控制中,有PI控制、重复控制、模糊控制等,这些都是在三相逆变器并网情况下,直接对并网电流进行控制,研究的重点在于并网稳态过程。功率控制中,PQ控制也是通过对输出电流控制进而控制进网功率。下垂控制则是基于同步发电机外特性的控制方法,能够在孤岛模式和并网模式下运行,并较多地应用在逆变器并联控制技术当中,实现功率均分[2]。
虚拟同步发电机(Virtual Synchronous Generator, VSG)控制技术是根据传统同步发电机控制技术而产生的一项新兴控制技术,下垂控制仅模拟了同步发电机的外特性,并没有同步发电机的大惯性和高输出阻抗等特点。文献[3]在VSG基础上,提出一种在线计算电压控制器参考输入电压新算法,补偿VSG固有下垂特性和线路阻抗的电压跌落,保证了VSG按照设定的U-Q下垂特性运行[3]。文献[4]在VSG模型基础上,将大电网中的一次调频和二次调频等理论引入到微电网,给出联网运行和孤岛运行模式下微电网的控制方法[4]。文献[5]设计了原动机调节和励磁调节,并模拟同步发电机的转动惯量,解决了传统逆变器运行时输出阻抗小、阻尼小等问题[5]。
本文在基于VSG二阶机电暂态模型的基础上,设计了功率-电压-电流三环控制结构,其中电压环和电流环分别为电容电压和电容电流反馈,可以提高系统稳定性,避免负载电流扰动对系统的影响。电压反馈环采用比例积分控制,以实现电压的零稳态误差控制,同时使系统还能具有较快的动态响应性能。电压环输出为电流环参考电流,电流环采用比例控制,以提高响应速度。在详细分析控制参数整定下,同时详细分析了系统的输出阻抗,利用小信号分析法讨论了转动惯量、有功系数和无功系数对系统性能的影响。最后对三环控制系统进行一次调频和二次调频,并进行仿真,验证该控制方法可行性。
1VSG模型
同步发电机根据不同的简化,有二阶模型、三阶模型、五阶模型等。为避免同步发电机复杂的电磁耦合关系,以同步发电机二阶模型作为VSG的控制算法[6-7]。假设同步发电机为隐极式同步发电机,极对数为1,其数学模型为
(1)


R——定子电枢电阻;
X——同步电抗;
J——转动惯量;
ω——电角速度;
Pm——机械功率;
Pe——电磁功率;
D——阻尼系数(本文取零);
Δω——额定电角速度与实际电角速度之差。
因同步发电机输出频率变化很小,可做式(1)的近似处理[8]。
三相逆变器在VSG算法下的框图结构如图1所示。

图1 三相逆变器整体控制框图
基于式(1)同步发电机的数学模型,可得VSG的本体算法框图如图2所示。根据由虚拟原动机得到的机械功率Pm、输出有功功率Pe及转动惯量J,得到电容电压的指令值uref[9-10]。该算法避免了真实同步发电机中复杂的电磁耦合关系,减弱了有功功率和无功功率控制的耦合性[11];并且,可根据实际要求,灵活选取转动惯量等关键参数。

图2 VSG本体算法
为使逆变器在孤岛模式下具有较快的动态特性和抗干扰能力,本文采用带电压环和电流环的双环控制。其中,外环为电容电压环,内环为电容电流环。双环控制如图3所示。
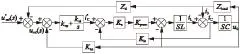
图3 双环控制框图

2控制器设计
2.1调速器和励磁控制器
由于同步发电机的输出阻抗及线路阻抗呈感性,同步发电机的输出呈现下垂特性,即输出有功功率与功角呈线性关系,无功功率与电压呈线性关系。当频率设定值不变时,同步发电机输入机械功率随着系统频率的减小(增大)而增大(减小),最终维持频率的稳定,此即电力系统的一次调频过程[12]。定义同步发电机有功功率-频率调差系数m为
(2)
调差系数的大小标志着频率变化时同步发电机输入机械功率变化量的多少,m越大输入机械功率变化量越小。VSG输入机械功率为
(3)
在励磁控制器作用下,同步发电机的静态无功功率-电压亦呈现下垂特性。随着输出无功的增大(减小),同步发电机的励磁电动势将减小(增大),此即电力系统一次调压过程[13-14]。定义无功功率-电压调差系数n:
(4)
调差系数n的大小标志输出无功功率变化时同步发电机励磁电动势变化的多少,n越大励磁电动势变化量越大。
一次调频调压属于有差调节,频率和电压的变化都在额定范围内[15]。当负载突变超出频率或电压额定范围时,此时必须要进行二次调节。此过程即是将有功-频率和无功-电压下垂特性曲线向上或者向下进行平移,使频率和电压恢复到额定值或在额定范围内[16-17]。
2.2双环控制器设计与分析
对于双环控制,采取将三相静止坐标系转换到两相旋转坐标系上,从而对电压电流进行控制。
对于电流环部分,由图3可得电流环部分的传递函数:
(5)

对于电压环,其截止频率应当小于电流环,且将电流环简化为增益为1的比例环。根据图3可知,则电压外环的传递函数为
(6)


图4 电压环和电流环伯德图
2.3等效输出阻抗计算
为简化分析,首先计算控制器等效输出阻抗,即先不计及定子阻抗Zd。
根据图3可得
(7)
A=LCs3+KicKeKpwmCs2+(1+KucKeKupKpwm)s+
KucKuiKeKpwm
则逆变器等效输出阻抗:
(8)
(9)
Δ=LCs3+KeKpwmCs2+(1+KupKeKpwm)s+
KuiKeKpwm
由于滤波电容数量级较小,对式(9)计算结果影响较小,则有
(10)

3稳定性分析
VSG输出有功功率P和无功功率Q。
(11)
式中:R——等效阻抗;
X——电抗;
E——励磁电压;
U——定子端电压。
利用小信号分析,有
ΔPe=kpeΔE+kpδΔδ
(12)
ΔQe=kqeΔE+kqδΔδ
(13)
式中参数具体如下:




由图2和式(3)可知,在功率反馈加入低通滤波器时,有
(14)
则有
(15)
(16)
式中:m、n——有功下垂系数和无功下垂系数;
ω0——基准参考角频率;
ωc——低通滤波器截止频率。
经计算有
as4Δδ+bs3Δδ+cs2Δδ+dsΔδ+eΔδ=0
(17)
其中:a=mJω0
b=mJω0ωc(2+nkqe)+1
单机运行时,取稳定运行点m=n=0.0001,J=0.5kg·m2,R=0.1Ω,X=0.015Ω,δ=0.00673,ωc=10rad/s,ω0=314rad/s,E=216V,U=214V。保持其他参数不变,改变转动惯量、有功下垂数和无功下垂系数时特征方程的根轨迹如图5所示。



图5 根轨迹
由图5(a)可知,随着转动惯量J的增大,离虚轴较近的两个共轭复根逐渐趋向于原点,说明系统的动态性能变差,衰减变慢,达到稳态的时间变长;且J逐渐越过虚轴,此时系统在虚轴右部存在极点,系统已不稳定。因此J的选择不宜过大或者过小。由图5(b)可知,随着有功系数的增大,系统的两对共轭复根均靠近虚轴且远离实轴,系统阻尼系数减小,系统的响应超调量会变大,动态响应过程时间会增加。即当有功下垂系数较大、有功调节过快时,易引起系统不稳定。由图5(c)可知无功下垂系数对系统的影响,其与有功下垂系数对系统影响大体相同。随着无功系数的增大,靠近虚轴的一对共轭复根逐渐变成主导极点,影响系统的主要性能。无功系数越大,阻尼系数越小,系统振荡加剧,超调量也变大。
4仿真分析
为了验证本文所提VSG模型控制方法的可行性,在MATLAB/Simulink环境下搭建了仿真模型。具体参数设置如表1所示。
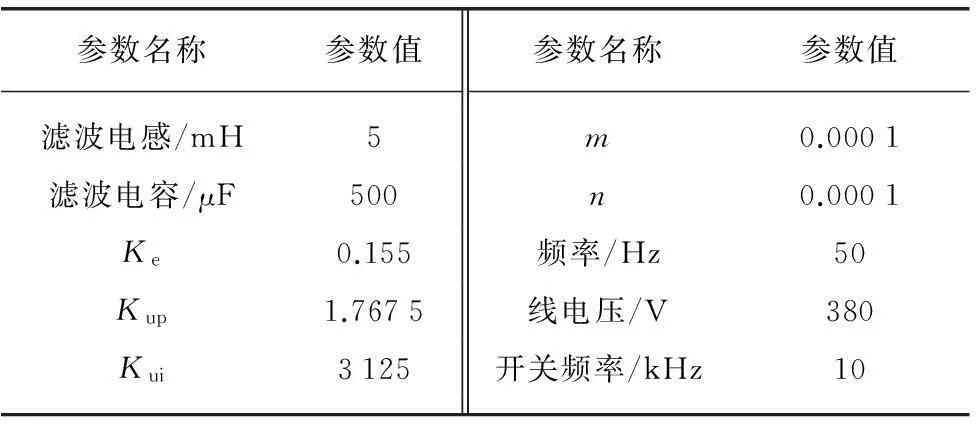
表1 仿真参数设置
VSG一个很重要的特性就是具有大惯性的特点,在数学模型中的表现形式即为转动惯量J。首先根据仿真结果分析转动惯量对系统的影响。系统首先带10kW+5kvar的阻感性负载,并达到稳态,如图6所示。
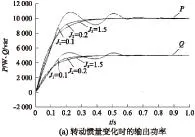
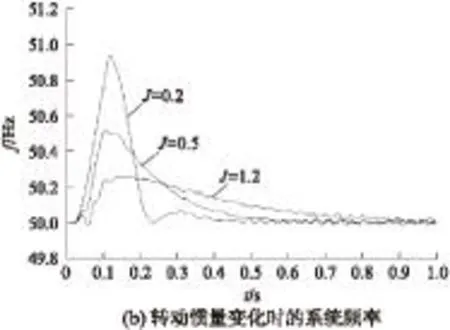
图6 转动惯量变化时的输出功率和系统频率
由图6可以看出,当转动惯量取不同值时,输出有功功率和无功功率以及系统频率达到稳态时的时间是不一样的。频率刚开始高于额定频率,是因为开始阶段输出功率未达到指令值,频率升高。这符合一次调频。当转动惯量取值越小时,即系统的惯性越小,输出功率达到额定功率时的快速性越好,但伴随着一定的超调量和振荡。惯性越大时,达到稳态的时间越长。对于频率,惯性越小,其达到稳态的时间越短,但其超调量也越大。随着转动惯量的增大,其超调量变小,对系统冲击变小,但达到稳态的时间也变长,符合惯性的基本原理。由于此处的惯性其实是虚拟的转动惯量,故在满足要求的情况下可以任意取适当的值。
在1s时,增加4kW+4kvar的阻感性负载,则输出功率以及频率变化如图7所示。
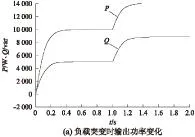

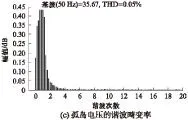
图7 负载突变时输出功率及频率变化
负载突变时,根据一次调频原理,系统将调节系统频率或电压以增加或减少输出有功和无功。负载增加4kW+4kvar时,系统频率和电压下降,以增加输出有功功率和无功功率。由图7(b)可看出,以有功-频率调节为例,有功增加4kW,系统频率下降了0.4Hz,频率变化在±0.2~0.5Hz范围内。由于下垂系数为0.0001,计算可得频率下降所增发的有功功率即为新增负载所消耗的有功功率。由图7(c)可知,孤岛电压的谐波畸变率为0.05%。在孤岛模式下,双环控制能够保证电压质量,控制效果良好。
当频率变化超出±0.5Hz时,系统必须进行二次调频。设定突变负载为7kW+4kvar,额定负载不变。输出功率及频率变化如图8所示。
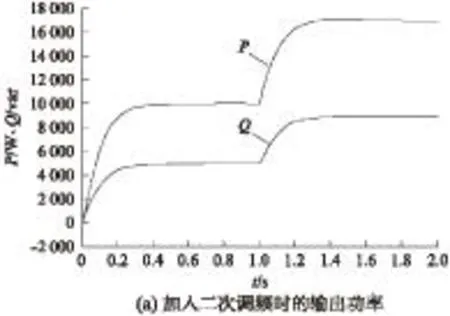

图8 加入二次调频时,输出功率及频率变化
由图8看出,系统输出有功为17kW,若不加入二次调频,系统频率将下降0.7Hz,超出额定范围。此时系统检测到频率超出额定范围,立即启动二次调频,在较短时间内,将频率变化控制在额定范围内,并保持功率输出满足负荷要求。由此证明本文所采用的三环控制在一次调节和二次调节时的有效性。
本文在VSG暂态二阶数学模型的基础上,采用电容电压和电容电流反馈控制,与虚拟同步发电机算法构成三环控制。在孤岛模式下,使系统具有下垂特性,从而具有一次调频调压的功能。对输出等效阻抗进行了详细计算分析,在同步电抗取值和滤波电感的条件下,输出等效定子阻抗近似等于同步电抗。仿真分析了转动惯量对于系统的影响。转动惯量越大,系统的超调量越小,但调节时间变长。由于系统具备一次调频功能,在负载突变时,系统降低频率以提高输出频率,且频率变化在标准范围内。由仿真结果可得,双环控制下,孤岛下电压畸变率极低,保证了供电电压质量。
【参 考 文 献】
[1]张莹,张扬.LCL滤波型风电并网变流器的研究[J].电机与控制应用,2011,38(7): 26-29.
[2]李浩然,杨旭红,薛阳,等.基于模糊PI参数自整定和重复控制的三相逆变器并网研究[J].电机与控制应用,2015,42(2): 31-36.
[3]杨向真,苏建徽,丁明,等.面向多逆变器的微电网电压控制策略[J].中国电机工程学报,2012,32(7): 7-13.
[4]朱丹,苏建徽,吴蓓蓓.基于虚拟同步发电机的微电网控制方法研究[J].电气自动化,2010,32(4): 59-62.
[5]张玉治,张辉,贺大为,等.具有同步发电机特性的微电网逆变器控制[J].电工技术学报,2014,29(7): 261-268.
[6]王思耕,葛宝明,毕大强.基于虚拟同步发电机的风电场并网控制研究[J].电力系统保护与控制,2011,39(21): 49-54.
[7]王文帝,徐青山,丁茂生,等.基于小信号建模的微电网下垂控制稳定性分析[J].现代电力,2014,31(3): 17-21.
[8]KIM J, GUERRERO J M, RODRIGUEZ P, et al.Mode adaptive droop control with virtual output impedances for an inverter-based flexible AC microgrid[J]. Power Electronics, IEEE Transactions on, 2011, 26(3): 689-701.
[9]刘真,鲍薇.微电网中基于复合虚拟阻抗的同步电压源控制策略研究[J].现代电力,2014(2): 60-65.
[10]王成山,高菲,李鹏,等.低压微网控制策略研究[J].中国电机工程学报,2012,32(25): 2-8.
[11]关雅娟,邬伟扬,郭小强.微电网中三相逆变器孤岛运行控制技术[J].中国电机工程学报,2011,31(33): 52-60.
[12]VANDOORN T L, MEERSMAN B, DE KOONING J D M, et al. Transition from islanded to grid-connected mode of microgrids with voltage-based droop control[J]. Power Systems, IEEE Transactions on, 2013, 28(3): 2545-2553.
[13]马添翼,金新民,黄杏.含多变流器的微电网建模与稳定性分析[J].电力系统自动化,2013,37(6): 12-17.
[14]LEE C, CHU C, CHENG P. A new droop control method for the autonomous operation of distributed energy resource interface converters[J]. Power Electronics, IEEE Transactions on, 2013, 28(4): 1980-1993.
[15]PLANAS E, GIL-dE-MURO A, ANDREU J, et al.Design and implementation of a droop control in d-q frame for islanded microgrids[J]. Renewable Power Generation, IET, 2013, 7(5): 458-474.
[16]杜燕,苏建徽,张榴晨,等.一种模式自适应的微网调频控制方法[J].中国电机工程学报,2013,33(10): 1-10.
[17]吕志鹏,盛万兴,钟庆昌,等.虚拟同步发电机及其在微电网中的应用[J].中国电机工程学报,2014,34(16): 2951-2963.
[期刊荣誉]
中文核心期刊中国科技核心期刊中国学术期刊(光盘版)
全国优秀科技期刊华东优秀科技期刊
中国科学引文数据库来源期刊中国学术期刊综合评价数据库来源期刊
*基金项目: 上海市科技创新行动技术高新技术领域重点项目(14511101200);上海市自然科学基金资助项目(13ZR1417800);上海市电站自动化技术重点实验室开放课题(13DZ2273800);上海市重点科技攻关计划(14110500700)
Control Research on the Three-Phase Inverter Based on
Virtual Synchronous Generator in Islanded Mode
LIHaoran,YANGXuhong
(Shanghai Key Laboratory of Power Station Automation Technology, Automatic Engineering college,
Shanghai University of Electric Power, Shanghai 200090, China)
Abstract:According to the traditional control of three-phase inverter, basing on the transient mathematical model of second order of virtual synchronous generator, the three loops control of power-voltage-current with virtual synchronous generator (VSG) by using the feedback of capacitance’s voltage and current was built. And the proportional and integral control was applied in the loop of voltage to ensure zero steady-state error. In the meantime,the control system has droop characteristic and virtual inertia as synchronous generator rotors. So the stability of frequency could be improved. The theory of VSG was analyzed firstly, and then the analysis of parameters tuning of voltage-current control and calculation of equivalent output impedance were given. Then, the effects of moment of inertia, active power coefficient and reactive power coefficient on system stability were analyzed in detail by using small signal analysis method. In the end, the simulation results showed that the control strategy was feasible and effective.
Key words:virtual synchronous generator; three-phase inverter; double-loop control; rotary inertia
收稿日期:2015-07-08
中图分类号:TM 921
文献标志码:A
文章编号:1673-6540(2015)12- 0043- 07
通讯作者:杨旭红
猜你喜欢
防爆电机(2021年3期)2021-07-21
高师理科学刊(2020年2期)2020-11-26
四川工商学院学术新视野(2020年2期)2020-08-13
物理与工程(2019年2期)2019-07-09
物理通报(2015年5期)2015-10-29
物理通报(2014年5期)2014-08-31
振动、测试与诊断(2014年4期)2014-03-01
物理与工程(2012年5期)2012-03-11
物理与工程(2010年5期)2010-03-25
物理与工程(2010年2期)2010-03-25