
高速四倾转旋翼机总体参数优化设计研究
2016-02-23 06:47周琪琛李春华
直升机技术 2016年1期
周琪琛,李春华
(中国直升机设计研究所,江西 景德镇 333001)
高速四倾转旋翼机总体参数优化设计研究
周琪琛,李春华
(中国直升机设计研究所,江西 景德镇 333001)
四倾转旋翼机总体参数设计涉及重量、性能等多个分析模型,各模型互相耦合、相互影响,其总体参数设计需兼顾多方面且相互矛盾的使用需求。建立了飞行性能、重量配置模型,并在深入分析各分析模型之间的关联关系的基础上,建立基于性能指标和重量约束的四倾转旋翼机总体参数优化设计方法。
四倾转旋翼机;总体参数;多目标优化;蚁群算法
0 引言
四倾转旋翼机兼顾直升机和定翼机的优点,具有垂直起降、空中悬停和高速巡航能力,是一种新概念直升机。这种构型的飞行器在装载能力、航程和稳定性方面具有突出的优势,在未来军事、政治和经济领域具有十分重要的战略地位,受到各国航空界的普遍重视。四倾转旋翼机作为一种新概念飞行器,是缺少参考样机和统计数据的,其总体参数选择比较复杂,用一般的工程设计方法往往需要反复进行,既费时间又不经济,拖延研制周期。本文采用优化设计方法进行四倾转旋翼机总体参数选择研究,具有重要的工程实际意义。
近年来,国外已开始启动四倾转旋翼的方案论证研究,当前的技术研究尚处于探索和原理验证阶段,主要是针对未来重型运输需求,从总体方案和气动分析方法方面开展技术研究[1-4]。如2003年,贝尔直升机公司的四旋翼民用倾转旋翼机方案的最大起飞重量可达56.8t,可载120名乘客,航程达1112km,巡航速度可达593km/h;波音公司先进民用四倾转旋翼机方案最大起飞重量35.9t,可载90名乘客,航程也可达1112km,巡航速度593km/h。国内方面,602所、南航对于双旋翼的倾转旋翼机开展了大量预先研究工作,然而,对四倾转旋翼机的研究尚未启动,对于四倾转旋翼的飞行性能分析、重量分配方案、总体参数选择等方面,技术基础薄弱。
本文基于连续域蚁群算法,将四倾转旋翼机总体参数设计转变为优化问题,在确定约束与目标的基础上,开展了四倾转旋翼机总体参数的优化设计。
1 连续域蚁群算法
意大利学者Dorigo等人于1991年提出了蚁群算法基本模型,经过20多年的发展,形成了完善的数学模型,并进一步发展了蚂蚁算法系列,如:精华蚂蚁系统、最大最小蚂蚁系统、多态蚁群算法等,应用领域从离散域拓展到连续域,具有良好的工程应用效果。本文基于连续域蚁群算法建立优化方法。
目前蚁群算法用于连续空间优化问题的蚁群算法主要有两种[5]:一种为蚁穴移动方法,即将所有蚂蚁置于一个蚁穴中,蚁穴位置位于设计空间中的任一点,所有蚂蚁在蚁穴内进行局部搜索,而通过移动蚁穴位置进行全局搜索;另一种为离散设计空间方法,本文采用的是这种方法。设优化参数为X={x1,x2,…,xn},估计参数的范围[xi min,xi max],令:
(1)
(2)
得参数R={q1,q2,…,qn},设参数均取m位有效数字,画nm条等距、等长垂直于X轴的线段,L1,L2,…,Lnm,L1~Lm表示参数q1的第1~m位,如图1。
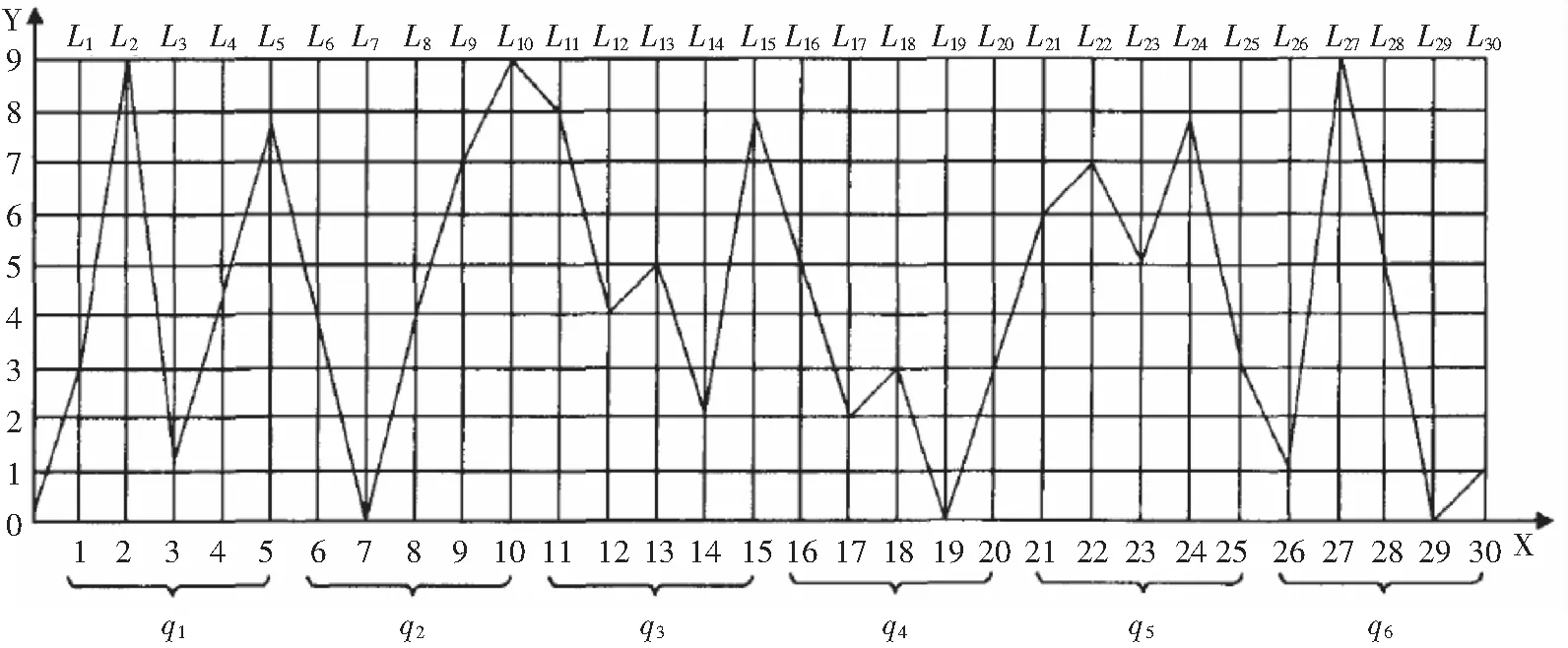
图1 城市的构建与蚁群路径构建
把这些线段9等分,则每条线段有10个节点,表示该数位可能取得10个值(0~9)。这样在XOY平面上共有nm×10个节点,每个节点代表一个城市。假设蚂蚁从线段上任意一个节点爬行到下一线段上任意一个节点的时间相等,且与节点距离无关,蚂蚁从坐标原点0出发,依次经过线段上的一点,当它爬行到线段Lnm上任意一点,即完成一次循环。其爬行路径可表示为:
Path={O,Knot(x1,y1,j),
(3)
则优化后参数的相应值可以根据换算公式得到:
(4)
设蚂蚁数目为m,对于每只蚂蚁k,根据蚂蚁完成一次循环的爬行路径确定相应的目标函数值Fk,定义蚂蚁k在t时刻从Li-1上任意一个节点转移到节点(i,j)的概率:
(5)
α为启发式因子,反映蚂蚁在运动过程中所积累的信息量在指导蚁群搜索中的相对重要程度,其值越大,蚂蚁选择以前走过路径的可能性就越大,搜索的随机性减弱;而启发因子值过小则易使蚁群的搜索过早陷于局部最优。
β为期望启发式因子,反映了启发式信息在指导蚁群搜索过程中的相对重要程度,其大小反映了蚁群寻优过程中先验性、确定性因素的作用强度。其值越大,则蚂蚁在某个局部点上选择局部最短路径的可能性越大。虽然算法的收敛速度加快,但蚁群搜索最优路径的随机性减弱,易于陷入局部最优。
τij(t)为t时刻节点(i,j)的信息强度,ηij(t)为节点(i,j)上的能见度,为了避免残留信息素过多使得残留信息淹没启发信息,蚂蚁每经过一个节点,就立即进行局部信息素的更新:
(6)
参数ξ满足0<ξ<1,τ0是信息素量的初始值。局部更新的作用在于蚂蚁经过每个节点时,该节点的信息素将会减少,增加探索未使用过边的机会,使算法不会陷入停滞状态。
为了提高优化效率,采用精英策略进行全局信息素更新,即当所有蚂蚁都完成一次路径构造后,记录最优蚂蚁,并将这最优蚂蚁与前代保留的全局最优蚂蚁进行比较,若优于,则替换成为新的全局最优蚂蚁,并将全局最优蚂蚁所经过的城市上的信息素进行全局更新:
(7)

2 四倾转旋翼机总体参数多目标优化
2.1 数学模型
本文建立的优化数学模型具有多个优化目标,希望优化目标同时达到最优,采用了线性加权和法开展多目标优化。其数学本质如下:
目标函数:
F(X)=w1f1(x)+w2f2(x)
设计变量:

约束条件:
w1,w2分别为不同目标的权重系数。
2.1.1 设计变量
四倾转旋翼机兼顾直升机与定翼机的优点,通过机翼两端可倾转的旋翼短舱,可实现直升机模式、飞机模式以及过渡模式的飞行。直升机模式飞行时,旋翼轴垂直机翼平面,旋翼提供升力、推力和操纵力;飞机模式时,四倾转旋翼机就相当于螺旋桨飞机,旋翼提供推力,而升力主要由机翼提供。两种模式之间通过过渡模式实现状态转换。四倾转旋翼机的这种构型特点,使其总体参数与直升机和定翼机均不相同。主要的设计变量包括:空机重量、旋翼半径、实度、桨尖速度、机翼面积、机翼翼展。在参数优化过程中,需对设计变量进行无量纲化处理。
2.1.2 目标函数
四倾转旋翼机的主要任务要求是大装载下的高速远程任务,影响其任务的主要设计要求有:有效载荷、任务航程和巡航速度。同时,需要考虑如下因素:
1)需要有良好的悬停性能,即无地效悬停高度,满足垂直起降任务需求。
2)需要对直升机模式下最大平飞速度进行限制,满足倾转过渡包线的要求;
因此,本文以倾旋翼机直升机模式下的悬停效率和飞机模式下的换算生产率作为两个目标函数,希望两个目标同时达到最优。
目标函数1:
(8)
目标函数2:
(9)
其中,KV为速度系数,Gxy为有效载荷,Vc为巡航速度,Lmax为最大航程,Gry为燃油重量,T为旋翼拉力,vi为诱导速度,Psj为实际悬停功率。
四倾转旋翼机仅在起飞、降落及一些特殊的工作条件下以直升机模式飞行,而大部分时间是在飞机模式下进行飞行的,因此在权重系数的选择上,偏重于换算生产率,悬停效率处于次要地位,两个子目标在综合效率的权重分别为70%、30%。
2.1.3 约束条件
1)设计变量的约束
设计变量的约束应保证取值范围应具有合理的寻优空间。
2)重量效率与飞行性能的约束
重量效率约束保证优化后的方案重量效率高于样机值。
3)飞行性能的约束
从直升机模式向飞机模式过渡飞行时,飞行速度至少需要超过飞机模式下的最小飞行速度,因此,对直升机模式下的最大速度Vmx进行约束:
(10)
VFmin为飞机模式下的最小速度。
4)其他约束
旋翼直径受机翼尺寸的限制,
普通高校创办社区学院,开展社区教育,在当前还处于初步探索阶段,在思想认识、课程设置、教师队伍、社会合作等方面还存在明显的不足。
(11)
b为机翼翼展,lF为机身长度。
2.2 分析模型
2.2.1 飞行性能模型
四倾转旋翼机的飞行性能包括直升机模式下与飞机模式下的飞行性能。直升机模式下的飞行性能主要包括悬停升限、最大垂直爬升率和最大速度;在飞机模式下的性能主要是最大平飞速度、最小平飞速度和航程航时。飞行性能与发动机的功率和耗油率特性、旋翼气动特性、飞机升阻特性和总体参数等密切相关。
1)气动力建模
四倾转旋翼机的气动力主要由旋翼、机翼、发动机短舱、机身和垂尾产生,以叶素理论为基础,建立孤立旋翼的气动力模型;借鉴GTRS模型处理方法来近似获得机翼的气动力[6];机翼升阻特性、机身阻力特性与发动机短舱阻力特性采用飞机设计手册中的工程方法进行估算[7];垂尾的升阻特性计算与机翼的类似;机身升力很小,可做为小量忽略不计。
2)需用功率
需用功率(P需用)主要由三部分组成:推进功率、诱导功率和型阻功率.
P需用=TV+Tvi+Px
(12)
其中,T和V分别为倾转旋翼机飞行方向的拉力(或推力)和飞行速度;vi为气流通过旋翼桨盘时被作用的诱导速度;Px为旋翼桨叶型阻功率。叶素理论作为计算旋翼力和诱导速度及旋翼功率的基础。
3)发动机功率
四倾转旋翼机采用4台涡轮螺旋桨发动机,参照国外文献,单台发动机功率为5593kw。高度特性采用通用涡轮螺旋桨发动机的高度特性曲线进行修正计算。
2.2.2 重量模型[8]
1)机翼
(13)
2)机身
(14)
3)发动机安装及其短舱重量估算
(15)
4)旋翼系统
(16)
5)燃油系统重量估算
(17)
6)发动机操纵系统的重量估算
(18)
7)飞行操纵系统重量(Cessna方法)
(19)
8)液压、气压系统重量
(20)
9)电气系统重量
(21)
10)仪表和通信导航设备重量
(22)
11)环控和防冰除冰系统
(23)
2.3 总体参数优化流程与步骤
基于优化算法,结合飞行性能分析方法,本节建立总体参数优化方法,该方法的计算流程与步骤见图2。
3 优化结果分析
基于蚁群算法,开展四倾转旋翼机的总体参数优化,优化结果如表1所示。
发动机功率参考国外相同机型给出,因此并未作为优化参数,优化前后不变,这样便于对比优化前后的飞行性能。
根据优化结果可以看出:
1)优化后旋翼直径减小,机翼展长和机翼面积减小,因此空机重量减小,这与重量模型是一致的。

图2 四倾转旋翼机总体参数优化流程图
2)由于空机重量减小,在起飞重量不变的情况下,燃油重量增加,因此,直升机模式和飞机模式下的航程航时均有所增加。
3)旋翼直径减小,使桨盘载荷增大,增大了四倾转旋翼机在垂直飞行时的诱导功率,垂直飞行性能尤其是升限下降,悬停效率和垂直爬升率也随之减小。
而机翼面积减小,使四倾转旋翼机在垂直飞行时受旋翼下洗流影响的机翼面积减少了,附加阻力减小,因此垂直飞行性能应有一定的提升。
从本文优化结果可以看出,垂直飞行性能有所增加,说明在本文所选参数范围内,旋翼直径对垂直飞行性能的影响小于机翼面积。
4)飞机模式下,展弦比变小,产生了更大的升致阻力,使得四倾转旋翼机飞机模式的最大平飞速度下降。

表1 优化结果与初步方案对比
5)优化后最小平飞速度比较高,这是由于机翼面积的下降使得倾转旋翼机必须以更快的最小速度飞行才能产生足够的升力。
6)桨尖速度对四倾转旋翼机的悬停升限、航程航时、爬升率影响不大,最大飞行速度随着桨尖速度的增大而降低。尽管桨尖速度增大后,四倾转旋翼机在直升机模式下的型阻也随之增大,但在悬停状态时,诱导功率占主要部分,因而对悬停升限影响较小。由于桨尖速度提高后在大速度飞行时前行桨叶会产生较大的波阻,将严重影响到最大飞行速度的提高。
4 总结
四倾转旋翼机总体参数多目标优化的结果是:
1)旋翼和机翼尺寸减小,使空机重量减小,在起飞重量不变的情况下,燃油重量增加,因此,直升机模式和飞机模式下的航程航时均有所增加。同时,机翼面积减小,减小了直升机模式飞行时的附加阻力,垂直飞行能力增强。但由于机翼参数的变化,飞机模式下的最大飞行速度和最小飞行速度有一定的减小。采用遗传优化算法优化的结果是可行和合理的。
2)多目标优化综合考虑了两种飞行模式下的飞行性能,满足各个目标函数之间相互矛盾的需求。
[1] Wood T L,Collins B,Isaac M. Quad Tiltrotor: a Solution for Intra-Theater Lift[C]. 58th AHS Annual Forum Proceedings,2002,vol.2:1754-1767.
[2] Yeo Y,Johnson W.Performance and Design Investigation of Heavy Lift Tiltrotor with Aerodynamic Interference Effects[R]. NASA,2007:1-19.
[3] Schmitz R. An experimental investigation of ground effect on a quad tilt rotor in hover and low speed forward flight[D]. University of Maryland, College Park,2006.
[4] Baeder J D. Analysis of Quad-Tilt Rotor blade aerodynamic loads using coupled CFD free wake analysis[C].AIAA,2002,20th AIAA Applied Aerodynamic Conference:1-13.
[5] 朱庆镇.倾转旋翼机总体参数优化设计[D].南京:南京航空航天大学硕士论文,2011.
[6] Carlson E B. Prediction of Tiltrotor Height-Velocity Diagrams Using Optimal Control Theory[J].JOURNAL OF AIRCRAFT, 2003, 40(5).
[7] 飞机设计手册总编委会,编.飞机设计手册(第6册气动设计)[M]. 北京:北京航空工业出版社,2002.
[8] 飞机设计手册总编委会,编.飞机设计手册(第8册重量平衡与控制)[M].北京:北京航空工业出版社,1999.
[9] David S.The Quad Tiltrotor:It's Beginning and Evolution[C].Internation Powered Lift conference, 2000.
[10] 许 林.飞行器MDO过程及相关技术研究与应用[D].北京:国防科学技术大学,2009.
[11] Konak A, Coit D, Smith A. Multi- objective Optimization using Genetic Algorithms :A Tutorial [J]. Reliability Engineering and System Safety,2006.
Optimization Design of Primary Parameters for High-Speed Quad Tiltrotor
ZHOU Qichen, LI Chunhua
(China Helicopter Research and Development Institute, Jingdezhen 333001, China)
The general parameters design of QTR relate to calculation model of flight performance and weight distribution. All the calculation models are interactional and the selecting of the general parameters must give consideration to two or more things. This paper built the calculation models of flight performance and weight distribution. Based on the analysis of the relationship between different models, this paper also built the optimization design method of the general parameters for QTR.
quad tiltrotor;general parameter scheme;multi-objective optimization;genetic algorithm
2015-09-06 作者简介:周琪琛(1990-),男,四川乐山人,硕士研究生,助理工程师,主要研究方向:直升机总体设计。
1673-1220(2016)01-001-06
V211+.6;V275+.1
A
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
军民两用技术与产品(2021年9期)2021-03-09
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2019年9期)2019-05-30
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2016年8期)2016-11-16
