
MotionView及HyperStudy在全地形车前悬架设计中的应用
2016-03-15 12:33常立晔李成
计算机辅助工程 2016年1期
常立晔 李成
摘要:为解决全地形车大行程前悬架的悬架跳动与前束角变化的协调问题,研究一款全地形车前悬架的运动学模型.在MotionView中建立该全地形车前悬架的运动学模型,借助HyperStudy对悬架跳动与前束角变化关系曲线进行优化,获得与理想曲线较接近的结果.
关键词:全地形车; 悬架跳动; 前束角变化; 双横臂悬架; 试验设计
中图分类号: U461.6 文献标志码:B
Abstract:To solve the coordination problem between the largestroke front suspension bump and the toein angle variation of all terrain vehicle, the kinematics model of the front suspension of an all terrain vehicle is researched. The kinematics model of the front suspension of the all terrain vehicle is built in MotionView, and the relation curve between suspension bump and toein angle is optimized by HyperStudy, which is consistent with the ideal curve.
Key words:all terrain vehicle; suspension bump; toein angle variation; double wishbone suspension; design of experiment
0 引 言
近年来,随着人与环境互动的发展以及农业、娱乐和越野运输等需求的增加,全地形车的开发和制造发展迅速.凭借4只宽大的越野低压车胎,加上四轮独立悬架系统,全地形车自由穿梭在最难走行的沙滩或荒漠,载人、载物甚至野地救援都非常合适.这种体形小巧、越野性能强、机动性高的四轮汽车在某些时候甚至比性能强悍的SUV四轮越野汽车更具机动性能.全地形车的军用潜力也已经被越来越多的军队所认识;其家族庞大,而且型号繁多.[12]2款经典的小排量全地形车见图1.
然而,这种轻型全地形车的底盘悬架几何设计要求比量产汽车还要精准,悬架行程约150 mm,传动轴侧移可达7~8 mm,若没有可靠的仿真分析,很难确保行车安全.
目前,在悬架设计方面,清华大学的王磊等
[3]对全地形车中、后桥双横臂平衡悬架的设计问题进行研究,并对恶劣路况下三轴全地形车中、后桥垂直载荷进行合理分配.天津大学的冯仁川[4]用Adams对UTV的前悬架进行优化设计,并对整车稳态转向特性进行研究.本文则用多体动力学仿真分析软件MotionView对全地形车前悬架进行研究.
为分析自制全地形车前悬架的性能及其对操纵稳定性的影响,在MotionView中建立该悬架的动力学模型并进行仿真分析,同时利用HyperStudy中的DOE和Optimizaiton模块进行优化设计.通过优化对比调整前悬架的参数得到理想的Bumpsteering特性以及良好的高速操控性.
MotionView中带有多种型式的整车前后悬架模型,能够快速建造高精度的参数化汽车模型,主要用于对轿车的动态仿真分析.HyperStudy能与MotionView无缝衔接对仿真进行试验设计及优化分析,使用户可以更精确地对设计进行量化研究.应用HyperStudy可以很方便地进行一系列的仿真试验,从而精确地预测所设计的复杂机械系统在各种工作条件下的性能并提供专业的试验统计结果.[5]
1 前悬架模型的建立和仿真分析
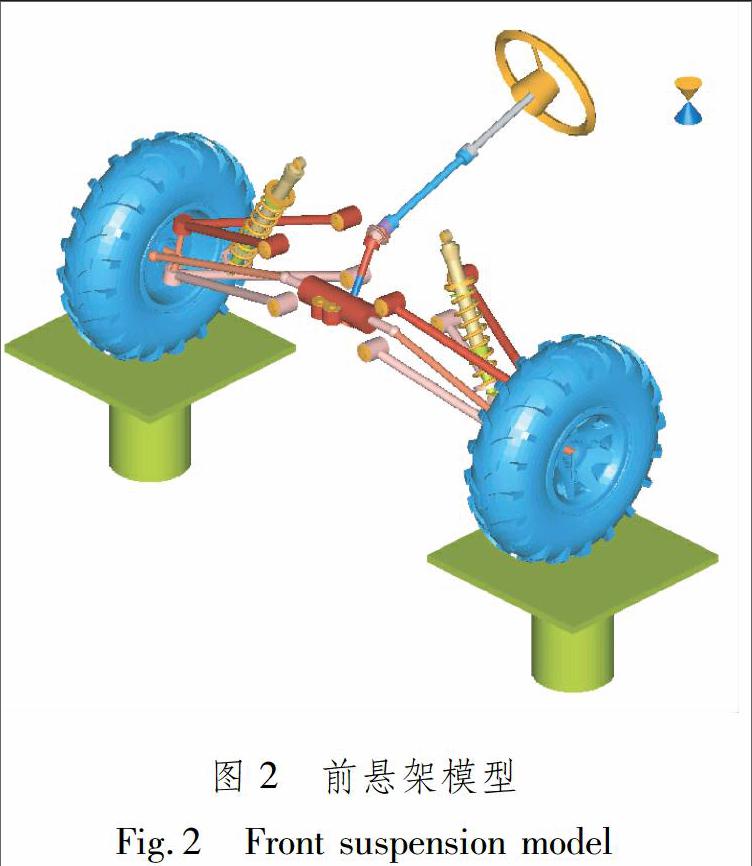
模型硬点的空间位置坐标和相关参数是建立
MotionView动力学模型的关键.首先,根据既定参数在MotionView中搭建全地形车的前悬架动力学模型并仿真,确定所有的连接硬点(也就是常说的球销和衬套连接点).建立的前悬架模型见图2.
悬架在跳动过程中转向轮定位参数发生变化的规律称为悬架的运动学特性.车轮定位参数中前轮外倾角、前轮前束角、主销内倾角和主销后倾角对汽车的操纵稳定性影响较大.[67]为反映前轮定位参数随车轮跳动的变化规律,在MotionView中进行双侧车轮平行跳动仿真,全地形车设计跳动范围为上跳180 mm、下跳90 mm,分析前轮前束角的变化规律.由于汽车的对称性,左右车轮定位参数相同,故仅分析左轮定位参数.
通过对比前轮定位参数在横坐标为0时的值与在数值模拟中测量的值是否一致,判断所建模型的正确性,确保仿真结果的可信度.
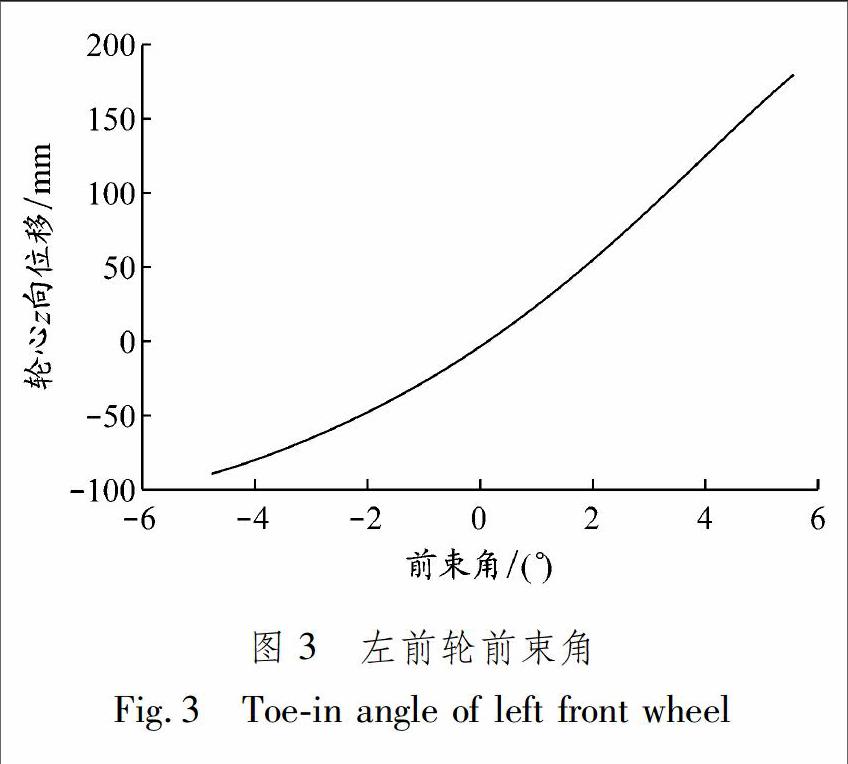
在整车运动过程中,轮胎与车身之间的相对位置会发生变化,造成前轮定位参数发生相应变动.车轮定位参数的变化量不能太大,否则将会加剧轮胎和转向机构的磨损并降低整车操纵稳定性和其他相关性能.[812]轮胎上下跳动时对应的前束角的变化称为BumpSteering特性.当车辆行驶时,如果BumpSteering变化太大将会影响车辆的直线行驶稳定性,最高车速也会受到影响,同时增大轮胎与地面间的滚动阻力,加剧轮胎的磨损.所以,在悬架系统设计中BumpSteering是非常重要的指标,原则是变化量越小越好.原始设计的BumpSteering规律见图3.前轮前束角变化较大:在-90~180 mm的轮跳范围内,前束角的变化范围为-5~5°,是BumpSteering较大的表现,属于恶劣工况.因此将其作为目标函数,在HyperStudy中进行优化,使其达到理想状态.
2 优化设计
利用HyperStudy可以对车轮定位参数中的某项或多项进行优化,使定位参数达到理想值.本文通过对悬架的部分硬点坐标进行改变,达到优化前束角的目的.
双横臂悬架中影响前束角变化的主要因素是悬
架定位硬点位置的选择.双横臂悬架硬点较多,但每
个硬点坐标值对设计效果的影响不同.可以利用HyperStudy中的DOE模块进行筛选试验,找到对前束角影响较大的几个坐标.虽然悬架上下控制臂硬
点对前束角也有较大影响,但是由于悬架整体结构已确定,上下控制臂硬点不能更改,因此根据实际情况,此处取转向横拉杆外点3个方向坐标xA,yA和zA以及转向横拉杆内点2个方向坐标xB和zB,共5个坐标作为变量进行分析优化.沿用一款成熟的转向机,转向机输出端(横拉杆内点)长度固定,所以内点的y方向暂不作为设计变量,最终如不能得到理想结果,再考虑横拉杆内点y方向的变动(此时需要新开发转向机).
设置每个坐标点的变化范围为10%(见表1),利用HyperStudy中的DOE模块进行分析.
表2中的第4号试验为近似最优组合,具体坐标值见表3.将其代入模型验证,结果见图4.
由图4可知:前束角的变化范围为-6.5~1.6°,DOE给出的近似最优组合并没有达到预期的结果.因此,通过Optimizaiton模块继续对模型进行优化.
最优组合与预期结果相差巨大,不排除优化区间选取偏小的原因.此处,根据DOE分析结果中各坐标值的变动趋势对目标函数的影响,放大对目标函数有利的优化区间,调整优化区间结果见表4.
此处选用序列二次规划优化算法进行计算[13],最大迭代次数设置为25,优化进程见图5,优化结果见表5.
由图5可知:第4次迭代以后目标函数的变化很小.由表5可知:最优结果为第25次迭代试验,而且最后几次试验响应值变化较小,优化结果可接受.为设计方便,仅修正2个点的坐标,结果见表6.
优化后前悬架模型前束角随车轮跳动的变化曲线见图6.与原悬架相比,车轮上跳180 mm、下跳90 mm时,车轮前束角的变化范围为-0.2~0.2°,明显减小且满足设计要求.
优化前优化后的几何模型对比见图7,优化后的全地形车实车悬架见图8.
3 结束语
前悬架结构设计不当会大大影响汽车产品的使用性能,如转向沉重、摆振、轮胎偏磨影响轮胎使用寿命等.[14]本文采用MotionView对前悬架的几何结构进行建模和分析,并且运用HyperStudy对模型进行优化,解决车轮跳动过程中前束角变化过大问题.
本文前悬架系统的优化、经验参数的设置等可对全地形车及其他车型的悬架系统设计优化提供参考.在开发新车或在已有车型基础上进行改进设计时,在实际样件、样车制造出来之前,利用MotionView及HyperStudy提供的动态仿真环境对前悬架甚至整车的一些主要性能进行预测、评估,可以大大缩短产品的开发周期.用本文方法进行的自制全地形车前悬架设计优化,证明此方法可缩短开发周期,优化后的悬架系统在后期实车路试中表现突出.
参考文献:
[1]金晓辉, 宋永刚, 何建清. 轻型全地形车现状及发展趋势分析[J]. 汽车运用, 2005(7): 1516.
JIN Xiaohui, SONG Yonggang, HE Jianqing. Analysis of current situation and development trend of light allterrain vehicle[J]. Auto Application, 2005(7): 1516.
[2]贾小平, 于魁龙, 李军. 全地形车辆现状与发展趋势[EB/OL]. (20101204)[20150401]. http://wenku.baidu.com/link?url=LZ_zjrkl9mNl4yq0NLrEeh_wMjum8bO3TJC3Nl9PhUkAKxNlopUbAvcoUmW15nNCVL65BJ3t93cBE84DuxXF37IDw9S_jXNo6cHpRzEAdS.
[3]王磊, 金达锋. 全地形车中、后桥双横臂平衡悬架设计[J]. 拖拉机与农用运输车, 2007, 34(1): 6466.
WANG Lei, JIN Dafeng. Middle & rear double wishbone equilibrium suspension's design of all terrain vehicle[J]. Tractor & Farm Transporter, 2007, 34 (1): 6466.
[4]冯仁川. UTV前悬架的优化设计及整车稳态转向特性研究[D]. 天津: 天津大学, 2011.
[5]李修峰, 王亚斌, 王晨. MotionView & MotionSolve应用技巧与实例分析[M]. 北京: 机械工业出版社, 2013: 269275.
[6]余志生. 汽车理论[M]. 北京: 机械工业出版社, 2009: 130200.
[7]张洪欣. 汽车设计[M]. 2版. 北京: 机械工业出版社, 1996: 149184
[8]安相璧, 李树珉, 马效. 车轮定位与轮胎磨损关系分析[J]. 汽车研究与开发, 2001(2): 3032.
AN Xiangbi, LI Shumin, MA Xiao. Relationship between wheel alignment and tire wear[J]. Automobile Research & Development, 2001(2): 3032.
[9]季喜军, 耿振江. 现代汽车转向轮定位参数的变化[J]. 山西交通科技, 2001(1): 4647.
JI Xijun, GENG Zhenjiang. Change of modern automobile steering wheel orientation parameter[J]. Shanxi Science & Technology of Communications, 2001(1): 4647.
[10]马文烈, 李芳根, 刘仁鑫. 车轮外倾角与前束合理匹配的研究[J]. 拖拉机与农用运输车, 2006, 33(3): 5152.
MA Wenlie, LI Fanggen, LIU Renxin. Research on rightful matching with toein and camber of wheels[J]. Tractor & Farm Transporter, 33(3): 5152.
[11]尤明福, 刁哲军, 邢世凯. 汽车四轮定位分析及检测[J]. 汽车技术, 2002, 9(3): 3840.
YOU Mingfu, DIAO Zhejun, XING Shikai. Analysis and measurement of vehicle fourwheel alignment[J]. Automobile Technology, 2002, 9(3): 3840.
[12]国家质量监督检验检疫总局. 机动车运行安全技术条件: GB 7258—1977[S].
[13]洪清泉, 赵康, 张攀, 等. OptiStruct&HyperStudy理论基础与工程应用[M]. 北京: 机械工业出版社, 2013: 350356.
[14]褚志刚, 邓兆祥, 胡玉梅, 等. 汽车前轮定位参数优化设计[J]. 重庆大学学报(自然科学版), 2003, 26(2): 58.
CHU Zhigang, DENG Zhaoxiang, HU Yumei, et al. optimization of vehicle frontal wheel orientation parameters[J]. Journal of Chongqing University(Natural Science Edition), 2003, 26(2): 58.
(编辑 武晓英)
