
双绕组永磁容错电机矢量控制系统研究
2016-04-07 10:27李小庆朱景伟孙军浩曹林柏周博文
电工技术学报 2016年5期
李小庆 朱景伟 孙军浩 曹林柏 周博文
(大连海事大学 大连 116026)
双绕组永磁容错电机矢量控制系统研究
李小庆朱景伟孙军浩曹林柏周博文
(大连海事大学大连116026)
摘要针对双绕组三相永磁容错电机的结构,以在无故障和电机绕组开路及短路故障情况下获得相同的输出转矩为目标,提出双绕组三相永磁容错电机的矢量控制策略。电机的每相电流采用电流滞环控制技术。利用Matlab软件搭建了双绕组三相永磁容错电机矢量控制系统的仿真模型,设计调试了以TMS320LF28335 DSP为核心的硬件实验平台,仿真和实验结果证明了该矢量控制策略的正确性。
关键词:双绕组永磁容错电机故障矢量控制
Study on the Vector Control System for Dual Winding Fault-Tolerant Permanent Magnet Motors
LiXiaoqingZhuJingweiSunJunhaoCaoLinbaiZhouBowen
(Dalian Maritime UniversityDalian116026China)
AbstractBased on the structure of the dual winding fault-tolerant permanent magnet (FTPM) motor,for the objective of same output electromagnetic torque in both no fault and open or short circuit fault conditions within motor windings,the vector control strategy for the dual-winding motor control system is derived.The hysteresis current control technology is used in each phase current of the motor.The MATLAB simulation model of the dual winding FTPM motor drive is built,and the hardware experiment platform based on TMS320LF28335 DSP is established.The correctness of the proposed vector control strategies for the dual winding FTPM motor drive is verified by the simulation and experiment results.
Keywords:Dual-winding,fault-tolerant permanent magnet motor,fault,vector control
0引言
永磁容错电机是永磁同步电机与开关磁阻电机相结合的新型电机,由于其可靠性高、容错性能好,广泛应用于机车牵引、航空航天、船舶运输、压缩机组等领域[1-3],这些领域不仅要求电机的可靠性和工作效率要高,而且要求供电直流母线的电流谐波含量要小[4,5]。为实现这一目标,一些学者将两个相同的永磁容错电机(FTPMM)共轴连接,每个电机采用独立的供电电源、控制器和反馈系统,既可独立工作,也可同轴驱动负载,当其中任意一台电机出现故障而无法运行时,另一台电机也能够继续带载工作,当出现电源失效、控制器故障以及反馈系统故障等严重故障时也不会使整个系统完全瘫痪[6]。虽然这种方法在一定程度上保证了电机的可靠性,但依靠两台电机共轴驱动,不仅增加了系统成本,而且为保证电机的可靠性及冗余度,每台电机都不能达到额定负载运行,对电机自身也有影响[7]。为解决两台电机冗余结构带来的问题,一些学者提出将两台永磁电机结合到一台电机中,组成双绕组电机结构。双绕组三相永磁电机结构是多相电机和同步电机交叉融合的产物,在低压大功率驱动场合受到广泛关注[8]。近年来,许多学者对永磁同步电机的控制方法进行了较深入的研究。文献[9-12]对同步电机如何抑制转矩脉动以及稳定转矩波形提出了新型算法。为使同步电机也能实现容错控制,文献[13]提出了六相永磁同步电机容错控制方法,但容错控制性能不够理想。如果将双绕组永磁同步电机和永磁容错电机的优点相结合,在永磁容错电机中采用双绕组结构,该电机控制系统既能提高电机的利用率及可靠性,同时具有较好的容错控制能力。
本文结合多相电机与容错控制技术,并参照文献[14]中六相永磁电机的设计与优化方案,提出一种双绕组三相永磁容错电机结构和矢量控制方法,通过控制绕组的给定电流,使该系统在开路与短路故障时,电机能够维持正常运行,并使电机具有良好的动态和静态性能。
1双绕组永磁容错电机的特点
双绕组三相永磁容错电机的结构如图1所示,电机定子由两套三相绕组组成,转子上安装8极表贴式永磁体。为实现物理隔离,并保证容错电机相与相之间的磁、热耦合程度降到最小,电机采用单层集中式绕组,而且每个定子槽只包含单个绕组。为了实现各相绕组之间的电气隔离,电机定子的每相绕组都用H桥式拓扑结构电路作为驱动电路。H桥驱动电路也为容错电机实现开路与短路容错控制提供了硬件条件[15]。

图1 双绕组3相8极容错电机结构图Fig.1 Structure diagram of a dual-winding fault tolerant motor with three-phase and eight-pole
电机故障主要包括开路与短路故障,其中开路故障时绕组电流为零,使得电机产生较大的转矩脉动,而短路故障会使电机绕组电流过大,可能会烧毁电机,并使电机产生更大的转矩脉动。电机绕组的短路电流为
(1)
式中,E0为空载反电动势;ωe为电角速度;Ls为绕组自感;R为绕组电阻;Is为短路电流。对于双绕组永磁容错电机,由于R≪ωeLs,可忽略电阻影响,绕组电感与短路电流呈反比,因此增大电感可抑制短路电流。在设计永磁容错电机时可采用深而窄的槽口,增加电机电感,抑制短路电流。
图1为电机内部切面图,电机共有12个槽口,电机定子采用集中式绕线方式,两个槽口绕成一相绕组,电机分布有A、B、C、A0、B0与C0相绕组,其中A、B、C三相绕组的反电动势波形互差120°,而且A与A0、B与B0、C与C0为同相的两套绕组。在控制电机时,两套绕组用两套独立直流电源供电,两套驱动器驱动,即使其中的一套绕组出现故障,电机也可用另一套绕组继续工作。
2双绕组永磁容错电机矢量控制策略
2.1矢量控制系统结构
目前较为先进的电机控制方式有直接转矩控制、矢量控制等。为实现电机的容错控制,需要双绕组三相永磁容错电机在开路与短路故障状态下能够正常运行,而直接转矩控制在故障状态下计算磁链较为困难,所以本文采用矢量控制[16]。为保证控制方便,电机采用电流滞环控制策略,直接控制电机绕组上的电流大小,保证可通过控制电机每相的电流对输出转矩进行控制,即使电机在开路与短路状态下也可进行电机的转矩分配[17,18]。
电机控制采用直轴电流Id为零的矢量控制方法,其电机输出转矩与交轴电流关系为
(2)
式中,ψf为转子磁链;iq为交轴电流值;np为磁极对数;Te为电磁转矩。
本电机中有两套三相绕组,A、B、C三相绕组的反电动势分别为eA、eB、eC,A0、B0、C0三相绕组的反电动势分别为eA0、eB0、eC0。电机正常运行时电机反电动势具有如下关系
eA+eB+eC=0
eA0+eB0+eC0=0
(3)
电磁转矩为
(4)
式中,iA、iB、iC分别为A、B、C三相绕组的瞬时电流;iA0、iB0、iC0分别为A0、B0、C0三相绕组的瞬时电流;ωm为电机机械角速度。
图2为电机矢量控制系统结构框图。本文中双绕组三相永磁容错电机的两套绕组采用两套独立的逆变电路,矢量控制系统采用串联式双余度结构,用一台DSP作为控制器,同时用两个独立电源供电,为实现电机的开路与短路容错控制提供稳定的电源保障。电机连接速度环PI调节器,根据所述给定转矩获得直轴电流给定值和交轴电流给定值,通过2r/2s变换和2s/3s变换后得到正常状态下各相绕组电流给定值。连接电流检测单元,根据三相永磁容错电机的各相绕组电流变化判断任一相绕组是否发生短路或开路故障。根据判断故障结果,在电机开路与短路时,DSP重新分配电流信号,将转矩重新分配以达到实验效果。

图2 电机矢量控制系统结构框图Fig.2 Structure diagram of motor vector control system
2.2电机开路故障容错控制方法
当电机无故障时,电磁转矩关系式如式(4)所示。当系统出现故障时,则电机运行由对称状态变为不对称状态,此时电机将产生较大的转矩脉动[19],为了使矢量控制在电机故障时也能适用,需要将电机故障时的不对称运行状态,通过矢量的叠加分解,使电机运行变为对称状态。图3为双绕组三相永磁容错电机正常运行状态下的电流矢量示意图。

图3 正常工作电流矢量图Fig.3 Current vector diagram in normal operation
本文以电机一相开路故障为例,当电机A相绕组开路故障时,电机的电磁转矩为
(5)
若电机按正常工作状态下的矢量控制,计算电机各相绕组给定电流,但A相绕组电流的作用因断路而消失,此时电机会产生较大的转矩脉动。故可将A相绕组故障时,由于其电流缺失而产生的转矩脉动平均分配给其他几相绕组,用其他绕组电流产生的转矩对其故障相的转矩脉动进行抵消。具体方式为将A相绕组的给定电流分为3份,由其余5相绕组通过合成、叠加A相电流的作用:其中用B相和C相合成第一份电流作用,因为A、B、C三相绕组的电角度互差120°,仅需在B相和C相绕组原给定电流的基础上,再减去1/3倍A相绕组的给定电流;用B0相和C0相绕组合成第二份电流作用,因为A、B0、C0三相绕组的电角度互差120°,只需在B0相和C0相绕组给定的基础上,再减去1/3倍A相绕组的给定电流;用A0相绕组承担第三份电流作用,因为A和A0同相,在A0相绕组的给定电流的基础上,再加上1/3倍A相绕组的给定电流。图4为开路故障时电流分配矢量图。当A 相绕组发生开路故障时,其余5相绕组的电流给定值为
(6)
按式(6)给定的参考电流控制电机各相绕组的电流后,电机输出的电磁转矩就等于无故障时的输出转矩,而且此方法在理论上可实现消除电机开路故障所造成的转矩脉动。此方法也可适用于其他相开路故障时对电机的容错控制。

图4 开路故障时电流矢量图Fig.4 Current vector diagram in open-circuit fault condition
2.3电机短路故障容错控制方法
对于电机绕组的一整相短路故障来说,短路故障的处理方式相对开路故障的处理方法较麻烦,不仅要将短路相绕组本应提供的电磁转矩平均分配到其他相绕组上面,而且还要抵消短路故障相绕组自身短路时作为发电状态所产生的制动转矩,这也需要用其他相绕组提供相应的配合,同时电机的转子为永磁体,其磁动势是定值,故障相绕组处于发电状态下,其绕组电压和频率与电机的转速呈正比,但当电机转速达到额定转速时,即使转速一再增加,电机的电流都保持在一定范围内,关系式见式(1),实现短路容错时需要实时监控绕组电流,并加入到DSP运算中,具体分配方案与实现方法如下。
这里以A相绕组短路故障为例介绍电机短路故障容错控制方法。A相短路时,电机的电磁转矩为
(7)
式中,ishort为A相绕组瞬时短路电流。此时,其余5相绕组需要将A相绕组正常工作时的电流作用补充上,同时抵消A相绕组短路电流的作用,电机系统才能维持平稳运行。其中要将A相绕组正常工作时电流作用补充上,其方法与开路故障的处理方法相同,即将A相绕组的给定电流分为3份,平均分配到剩余5相绕组上。此外,A相绕组的短路电流将产生阻碍转矩,因此需要用剩下的5相绕组,产生一个与A相绕组短路电流相反的电流,抵消A相绕组短路电流所产生的阻碍转矩。具体方法为将A相绕组的短路电流取反、并平均分为3份,用剩余5相绕组通过合成、叠加其作用:由B相和C相绕组合成第一份电流作用,因为A、B、C三相绕组的电角度互差120°,仅需在B相和C相绕组的电流给定值的基础上,再加上1/3倍A相绕组的短路电流;由B0相和C0相绕组合成第二份电流作用,因为A、B0、C0三相绕组的电角度也互差120°,仅需在B0相和C0相绕组的电流给定值的基础上,再加上1/3倍A相短路电流;由A0相绕组承担第三份电流作用,因为A和A0同相,在原A0相电流给定值的基础上,再减去1/3倍A相绕组的短路电流,图5为短路故障时电流矢量图。当A相绕组发生短路故障时,其余5相绕组的给定电流为
(8)

图5 短路故障电流矢量图Fig.5 Current vector diagram in short-circuit fault condition
式(8)中各无故障相的给定电流包括两部分:一是补偿A相绕组开路故障时电机输出转矩的减少;二是补偿A相绕组短路电流产生的阻碍转矩。按式(8)给定的参考电流控制电机各相绕组的电流后,电机输出的电磁转矩就等于无故障时的输出转矩,而且此方法在理论上可实现消除电机短路故障所造成的转矩脉动。此方法也可适用于其他相短路故障时对电机的容错控制。
3仿真验证
为验证本文所提出的双绕组永磁容错电机的容错控制方法的正确性,采用Matlab仿真软件对电机容错控制方案进行仿真验证。为保证电机控制效果较明显,电机外加1.59 N·m的负载运行。在电机运行50 ms后,A相绕组突然发生开路故障,在无容错控制工作20 ms后采用开路容错控制策略对电机进行控制,电机的仿真结果如图6~图8所示,由仿真结果可知,电机在无故障工作时,电机转矩脉动为3.3%,一相绕组开路故障时,转矩脉动为14.2%,加入容错控制方法后转矩脉动为3.2%。电机无容错开路运行时,正常相电流幅值增大,转速波动变大,容错后转矩与转速都趋于平稳,证明本文所述容错控制可有效抵消转矩脉动,稳定转速,分配电流较合理。

图6 单相开路故障时转矩仿真波形Fig.6 Electromagnetic torque curve with single open circuit fault

图7 单相开路故障时转速仿真波形Fig.7 Speed curve with single open circuit fault

图8 单相开路故障时电流仿真波形Fig.8 Current curve with single open circuit fault
电机在正常运行50 ms时A相绕组发生短路故障,在无容错控制工作20 ms后,采用短路容错控制策略进行控制,其仿真波形如图9~图11所示。由图可知,电机正常工作时转矩脉动为3.5%,进入短路故障时转矩脉动为18.6%,用容错控制时转矩脉动恢复到3.8%,正常相工作电流为1.75 A,短路电流为3.4 A,通过容错控制转速波动也趋近稳定,因此该短路容错方法能有效抵消转矩脉动,使转速趋于稳定。

图9 单相短路故障时转矩仿真波形Fig.9 Electromagnetic torque curve with single short circuit fault

图10 单相短路故障时转速仿真波形Fig.10 Speed curve with single short circuit fault

图11 单相短路故障时电流仿真波形Fig.11 Current curve with single short circuit fault
4实验验证
本文使用的电机为双绕组三相八极永磁容错电机,该电机额定功率为0.75 kW,额定转速为2 000 r/min,额定转矩为3.18 N·m,额定电流为3.14 A,短路最大电流为3.60 A,电机可做短路容错实验。系统控制器采用数字信号控制器TMS320F28335。系统整体硬件设计平台如图12所示。

图12 实验平台照片Fig.12 Photos the experimental setup
系统硬件平台搭建完成后,对DSP进行编程并下载系统程序,对硬件电路进行实际的硬件调试。本实验所用电机给定转速均为500 r/min,为保证控制电机的电流便于观察,电机带有一定负载。当电机采用电流滞环矢量控制,正常运行时,电机的各项数据如图13~图16所示,电机的电流有效值为1.3 A,转速为500 r/min,转速误差为0.5%,输出转矩为1.85 N·m,转矩脉动为3.0%。

图13 A、B、C三相绕组电流波形Fig.13 A、B、C winding current waveform

图14 A0、B0、C0三相绕组电流波形Fig.14 A0、B0、C0 winding current

图15 正常工作时转速波形Fig.15 Speed waveform when normal operation

图16 正常工作时转矩波形Fig.16 Torque waveform when normal operation
当电机A相绕组开路故障,电机无容错控制时,电机各项数据如图17~图19所示,正常相电流有效值为1.25 A,输出转速为500 r/min,最大转速为517 r/min,最小转速为483 r/min,转速波动为3.5%,转矩为1.57 N·m,最大转矩为1.84 N·m,最小转矩为1.30 N·m,转矩脉动为17.2%。

图17 A相开路故障运行时A、B、C三相绕组电流波形Fig.17 A、B、C winding current waveforms when phase A open-circuit fault operation

图18 A相故障开路运行时转速波形Fig.18 Speed waveform when phase A open-circuit fault operation
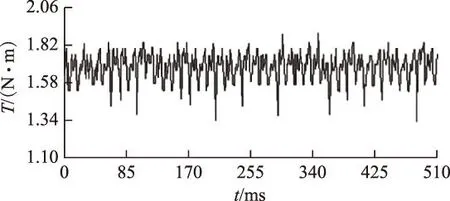
图19 A相开路故障运行时转矩波形Fig.19 Torque waveform when phase A open-circuit fault operation
当电机A相绕组短路故障,无容错控制时,电机各项数据如图20~图22所示,正常相电流有效值为1.48 A,短路相电流为3.5 A,输出转速为506 r/min,最大转速为525 r/min,最小转速为488 r/min,转速波动为3.5%,转矩为1.80 N·m,最大转矩为2.11 N·m,最小转矩为1.48 N·m,转矩脉动为17.6%。

图20 A相短路故障运行时A、B、C三相绕组电流波形Fig.20 A、B、C winding current waveforms when phase A short-circuit fault operation

图21 A相短路故障运行时转速波形Fig.21 Speed waveform when phase A short-circuit fault operation

图22 A相短路故障运行时转矩波形Fig.22 Torque waveform when phase A short-circuit fault operation
电机A相绕组开路故障,采用本文的容错控制方法时,实验数据如图23~图25所示,电机平均转矩输出为1.62 N·m,最大转矩为1.67 N·m,最小转矩为1.56 N·m,转矩脉动为3.5%,输出转速为500 r/min,最大转速为510 r/min,最小转速为490 r/min,转速波动为2%。相对无容错控制,电机开路故障时17.2%的转矩脉动与3.5%的转速波动,电机采用容错控制后电机拥有3.5%的转矩脉动与2%的转速波动,电机运行更加平稳。

图23 A相开路故障补偿时A、B、C三相绕组电流波形Fig.23 A、B、C winding current waveforms when phase A open-circuit fault compensation
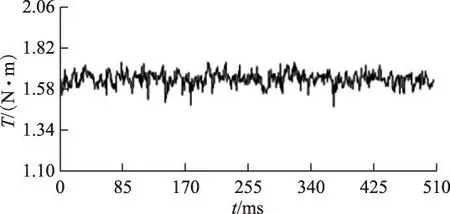
图24 A相开路故障补偿时转矩波形Fig.24 Torque waveform when phase A open-circuit fault compensation

图25 A相开路故障补偿时转速波形Fig.25 Speed waveform when phase A open-circuit fault compensation
电机A相绕组短路故障,采用本文的容错控制方法时,实验数据如图26~图28所示,短路故障时转矩输出为1.63 N·m,最大转矩为1.70 N·m,最小转矩为1.55 N·m,转矩脉动为4.5%,输出转速为508 r/min,转速波动为2.5%,相对无容错控制,电机短路故障时,电机拥有17.6%的转矩脉动和3.5%的转速波动,电机运行更加平稳。

图26 A相短路故障补偿时A、B、C三相绕组电流波形Fig.26 A、B、C winding current waveforms when phase A short-circuit fault compensation

图27 A相短路故障补偿时转速波形Fig.27 Speed waveform when phase A short-circuit fault compensation

图28 A相短路故障补偿时转矩波形Fig.28 Torque waveform when phase A short-circuit fault compensation
5结论
本文主要对双绕组永磁容错电机开路与短路故障的容错控制进行了研究。首先在理论上分析了电机发生开路与短路故障时所采用的容错控制方法,并通过Matlab仿真对理论分析进行了验证。最后运用DSP28335搭建的硬件平台,对本文所提出的开路与短路故障容错控制方法进行了实验验证。仿真与实验结果证明,本文所提出的容错控制方法对电机故障时的控制效果明显,且转矩脉动与速度波动均能达到理想的范围内。虽然本次实验仅做了一相绕组开路与短路故障的容错控制策略验证,但这种方法适应于所有的容错电机实现多相故障容错控制。
参考文献
[1]郝振洋,胡育文.电力作动器用高可靠性永磁容错电机控制系统的设计及其试验分析[J].航空学报,2013,34(1):141-152.
Hao Zhenyang,Hu Yunwen.Design and experimental analysis on the control system of high rellability fault tolerant permanent magnet motor used in electric actuator[J].Acta Aeronautica et Astronautica Sinica,2013,34(1):141-152.
[2]Nagorny A S,Dravid N V,Jansen R H,et al.Design aspects of a high speed permanent magnet synchronous motor/generator for flywheel applications[C]//2005 IEEE International Conference on Electric Machines and Drives,San Antonio,TX,2005:635-641.
[3]Zhao Wenxiang,Cheng Ming,Chau K T,et al.Remedial injected-harmonic-current operation of redundant flux-switching permanent-magnet motor drives[J].IEEE Transactions on Industrial Electronics,2013,60(1):151-159.
[4]Sun Zhigang,Wang Jiabin,Jewell G W,et al.Enhanced optimal torque control of fault-tolerant PM machine under flux weakening operation[J].IEEE Transactions on Industrial Electronics,2010,27(1):344-353.
[5]Zhao Wenxiang,Chau K T,Cheng Ming,et al.Remedia brushless AC operation of fault-tolerant doubly salient permanent-magnet motor drines[J].IEEE Transactions on Industrial Electronics,2010,57(6):2134-2141.
[6]朱景伟,刁亮,任宝珠,等.具有冗余特性的永磁容错电机短路故障分析与控制[J].电工技术学报,2013,28(3):80-86.
Zhu Jingwei,Diao Liang,Ren Baozhu,et al.Analysis and control of short-circuit fault in a fault-tolerant permanent magnet motor drive with redundancy[J].Transactions of China Electrotechnical Society,2013,28(3):80-86.
[7]郝振洋.六相永磁容错电机及其控制系统的设计和研究[D].南京:南京航空航天大学,2010.
[8]齐歌.双三相永磁同步电动机交互饱和模型与特性研究[D].武汉:华中科技大学,2010.
[9]Zhao Wenxiang,Cheng Ming,Hua Wei,et al.A redundant flux-switching permanent magnet motor drive for fault-tolerant applications[C]//IEEE Vehicle Power and Propulsion Conference,Harbin,2008:1-6.
[10]Jabbari A,Shakeri M,Navabi A.Torque ripple minimization in PM synchronous motors using tooth shape optimization[J].Majlesi Journal of Mechanical Engineering,2010(2):27-31.
[11]Hasanien H M.Torque ripple minimization of permanent magnet synchronous motor using digital observer controller[J].Energy Conversion and Management,2010,51(1):98-104.
[12]Zhu Jingwei,Ertugrul N,Soong W L.Minimum torque ripple current control strategy in a dual fault tolerant PM AC motor drive[C]//IEEE Power Electronics Specialists Conference,Rhodes,2008:1542-1547.
[13]薛丽英.六相永磁同步电动机驱动系统故障诊断与容错的研究[D].西安:西北工业大学,2006.
[14]Zhang Xiaochen,Zhu Jingwei,Liu Qingguan.Design and optimization of a six-phase fault-tolerant permanent magnet motor[C]//2012 7th International Power Electronics and Motion Control Conference (IPEMC),Harbin,2012,2:1314-1318.
[15]Mircea R,Felicia S,Loránd S.Study of a nine-phase fault tolerant permanent magnet starter-alternator[J].Journal of Computer Science and Control Systems,2011,41:90-106.
[16]Liu Wenxin,Liu Li,Chung I Y,et al.Modeling and detecting the stator winding fault of permanent magnet synchronous motors[J].Simulation Modelling Practice and Theory,2012,27(3):1-16.
[17]朱思国,欧阳红林,晏建玲.电流滞环控制级联型逆变器的矢量控制[J].高电压技术,2012,38(5):1260-1266.
Zhu Siguo,Ouyang Honglin,Yan Jianling.Vector control based on current hysteresis for cascaded inverter[J].High Voltage Engineering,2012,38(5):1260-1266.
[18]王伟,程明,张邦富,等.电流滞环型永磁同步电机驱动系统的相电流传感器容错控制[J].中国电机工程学报,2012,32(33):59-66+176.
Wang Wei,Cheng Ming,Zhang Bangfu,et al.Phase current sensor fault tolerant control of current hysteresis type for permanent magnet synchronous motor drive system[J].Proceedings of the CSEE,2012,32(33):59-66+176.
[19]Gopalakrishnan S,Omekanda A M,Lequesne B.Classification and remediation of electrical faults in the switched reluctance drive[J].IEEE Transaction on Industry Applications,2006,42(2):479-486.
李小庆男,1990年生,硕士研究生,研究方向为永磁容错电机控制技术。
E-mail:li827702336@126.com
朱景伟男,1963年生,博士生导师,研究方向为永磁电机及控制、新能源变换技术。
E-mail:zjwdl@dlmu.edu.cn(通信作者)
作者简介
中图分类号:TM351
收稿日期2015-01-09改稿日期2015-12-09
国家自然科学基金(51077007)和辽宁省科学技术计划(2011224004)资助项目。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
建材发展导向(2021年7期)2021-07-16
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
青年歌声(2019年2期)2019-02-21
知识经济·中国直销(2017年11期)2017-11-28
中国公路(2017年16期)2017-10-14
舰船科学技术(2015年8期)2015-02-27
