
基于趋近律方法的永磁同步电机滑模速度控制器设计
2016-04-08 05:08杨立秋海军驻昆明地区军事代表办事处昆明6508解放军理工大学南京0000
船电技术 2016年1期
杨立秋,袁 雷(.海军驻昆明地区军事代表办事处,昆明6508;.解放军理工大学,南京0000)
基于趋近律方法的永磁同步电机滑模速度控制器设计
杨立秋1,袁雷2
(1.海军驻昆明地区军事代表办事处,昆明650118;2.解放军理工大学,南京210000)
摘要:为了提高永磁同步电机(permanent magnet synchronous motor,PMSM)调速系统的动态品质,提出了一种基于趋近律方法的滑模速度控制策略。为了解决传统指数趋近律所存在的缺点,文中首先设计了一种改进的指数趋近律算法,该方法能够根据系统状态距离平衡点的远近而自适应调整趋近律速度;基于改进的指数趋近率设计了适用PMSM调速系统的速度滑模控制器。通过仿真结果验证了所提控制算法的有效性和可行性。
关键词:永磁同步电机趋近律方法滑模控制
0 引言
永磁同步电机(Permanent magnet synchronous motor,PMSM)由于其结构简单、体积小和功率密度高等优点而被广泛使用[1-3]。目前,三相交流PMSM调速矢量控制系统中的速度控制器普遍采用传统的PI控制,其算法具有简单、可靠性高及参数整定方便等优点。然而,由于三相PMSM是一个多维、非线性、强耦合的多变量系统,当控制系统受到外界扰动的影响或电机内部参数发生变化时,传统的PI控制方法并不能满足实际的要求[4]。
随着现代控制技术的发展,一些先进的控制算法逐步被应用于交流调速系统,以解决传统PI速度控制器存在的问题。目前,滑模控制(Sliding-mode control,SMC)作为一类特殊的非线性控制策略,由于其控制器设计简单,响应速度快和对参数变化和外部扰动具有强鲁棒性等优点而被广泛应用[5-8]。然而它也存在一个缺点:SMC对外界扰动和参数变化的抑制是通过增大切换增益来实现的,因此外界扰动的存在及参数的变化必然导致SMC的抖振现象的产生。根据滑模控制的基本原理,滑模可达性条件仅保证由状态空间任意位置运动点在有限时间到达切换面的要求,而趋近运动轨迹未作任何限制,采用趋近律的方法可改善趋近运动的动态品质。
为此,本文首先设计了一种改进的指数趋近律算法,该方法能够根据系统状态距离平衡点的远近而自适应调整趋近律速度。并基于此方法设计一种新型速度滑模控制器,理论分析证明了PMSM控制系统的稳定性。仿真结果证明了该控制策略的正确性与有效性。
1 改进的滑模趋近律设计
高为炳院士首先提出趋近律的概念,并设计了一种在国内外得到广泛应用的指数趋近律,其表达式为[9]:

对于指数趋近律,通过调整趋近律的参数ε,k ,即可以保证滑动模态到达过程的动态品质,又可以减弱控制信号的高频抖阵问题,但较大的ε值会导致抖阵现象。为了解决上述问题,文中设计了一种改进的指数趋近律算法,其表达式为:

2 滑模速度控制器设计
2.1 三相PMSM的数学模型

2.2 滑模转速控制器设计
为了便于控制器的设计,首先定义系统状态变量为:

式中,ωref为转速参考值,通常为一常数值。另外,根据式(3)和(4)可以得到如下表达式:


定义滑模面函数为:

对滑模面函数求导,并将式(6)代入可得

采用式(2)所示的趋近律方法,可以求得控制器表达式为:

从而可求得q轴的参考电流量为

可以表达式(10)可以看出,q轴的参考电流量经过了积分器的滤波作用,一方面可进一步削弱抖振现象,另一方面也可消除系统稳态误差,提高系统的动态品质。具体实现框图如图1所示。
2.3 稳定性分析
为了分析控制器的稳定性,定义Lyapunov函数为:对其求导,并将式(8)和(9)代入,可得


3 仿真结果分析
为了验证本文提出算法的有效性,基于如图2所示的PMSM矢量控制系统结构图,对提出的控制策略进行仿真研究,并与常规PI控制器相比较。仿真中PMSM的参数:电阻R =0.2 Ω,极对数转动惯量J=0.089kg m2,定子电感另外,滑模速度控制器的参数设置为α=2,c=100,k=50,ε=10。仿真条件设置为:转速参考值设置为500 r/min,在t=0.5 s突加负载TL=50 N.m。为了便于比较分析分别给出了采用PI控制器和滑模速度控制器的仿真结果,具体仿真结果分别如图3和图4所示。
通过比较图3和图4可以看出,无论是转速的动态响应速度和抗扰动能力,文中所提的控制策略都具有较好的控制效果,从而说明了该控制算法的有效性和强鲁棒性。
4 结论
本文针对常规的滑模控制算法在PMSM低速运行时产生的转速脉动及电磁转矩脉动问题,将在电机实际运行过程中的参数变化及不确定性和外部扰动等效为总的干扰量,并设计了一种新型速度滑模控制器。相对于常规滑模控制器其优点在于:对负载扰动和参数的不确定性具有较强的鲁棒性,抑制了PMSM的脉动现象。

图1 基于趋近律方法的滑模速度控制器框图

图2 PMSM滑模控制系统原理图
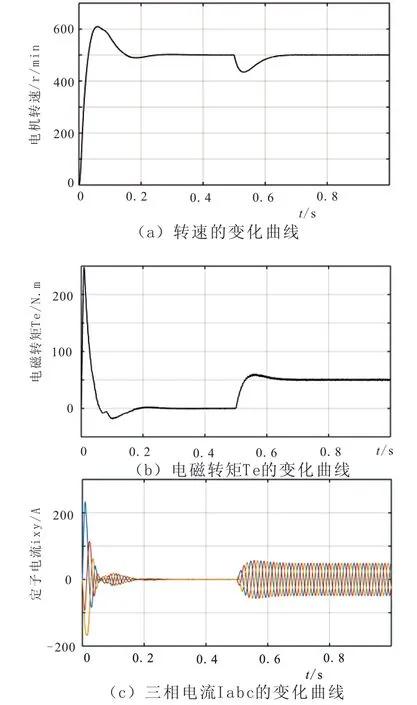
图3 基于PI速度控制器的仿真结果


图4 基于滑模速度控制器的仿真结果
参考文献:
[1] 袁雷,沈建清,肖飞,等.插入式永磁低速同步电机非奇异终端滑模观测器设计[J].物理学报,2013,62(3):030501.
[2] 杨书生,钟宜生.永磁同步电机转速伺服系统鲁棒控制器设计[J].中国电机工程学报,2009,29(3):84-89.
[3] Hans-Peter Nee.Determination of d and q reactances of permanent-magnet synchronous motors without measurements of the rotor position [J].IEEE Trans.on Industry Applications,2000,36 (5):1330-1334.
[4] 汪海波,周波,方斯琛.永磁同步电机调速系统的滑模控制[J].电工技术学报,2009,24(9):71-77.
[5] 张晓光,赵克,孙力.永磁同步电动机混合非奇异终端滑模变结构控制[J].中国电机工程学报,2011,31(27):116-122.
[6] 张晓光,赵克,孙力,等.永磁同步电动机滑模变结构调速系统新型趋近率控制[J].中国电机工程学报,2011,31(24):77-82.
[7] Paponpen K,Konghirun M.An improved sliding mode observer for speed sensorless vector control drive of PMSM[J].IPEMC,2006,(2):1-5.
[8] Han Y,Choi J,Kim Y.Sensorless PMSM drive with a sliding mode control based adaptive speed and stator resistance estimator[J].IEEE Transactions on Magnetics,2000,36(5):3588-3591.
[9] W.Gao and J.Hung,Variable structure control of nonlinear systems:a new approach [J].IEEE Transactions on Industrial Electronics,1993,40(1):45–55.
Design of Speed sliding Mode Controller for Permanent Magnet Synchronous Motor Based on Reaching Law Method
Yang Liqiu1,Yuan Lei2
(1.Naval Representatives Office in Kunming Area,Kunming 650118,China;2.PLA University of Science and Technology,Nanjing 210000,China)
Abstract:To improve the control performance,a siding mode speed controller strategy based on reaching law method is proposed for permanent magnet synchronous motor (PMSM) in this paper.First of all,a novel reaching law method is designed to solve the existing problems in traditional reaching law,a novel siding mode control (SMC) based on the proposed reaching law method is designed by using of the advantages,which can effectively improve system robustness and response.All results show that the algorithm has the advantages of faster response,less stabilization error,and also the vibration is restrained effectively.
Keywords:permanent magnet synchronous motor;reaching law;sliding mode control
作者简介:杨立秋(1988-),男,工程师。研究方向:水中兵器。
收稿日期:2015-10-09
中图分类号:TM351
文献标识码:A
文章编号:1003-4862(2016)01-0074-04
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
北京航空航天大学学报(2017年4期)2017-11-23
光学精密工程(2016年3期)2016-11-07
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
