基于机器视觉的弹壳表面缺陷检测系统设计
2016-04-11 01:11苟文韬谢蔚卿
兵器装备工程学报 2016年2期
苟文韬,谢蔚卿
(西南自动化研究所,四川 绵阳 621000)
基于机器视觉的弹壳表面缺陷检测系统设计
苟文韬,谢蔚卿
(西南自动化研究所,四川 绵阳621000)
摘要:针对落后的检测枪弹外观品质工艺,利用机器视觉技术,设计了包含基于线阵相机的图像采集方式、缺陷分割算法以及缺陷分类算法的一套完整的解决方案。试验表明,该方案能准确实现对缺陷的分割和分类。
关键词:机器视觉;枪弹;表面缺陷;检测;分类
Citation format:GOU Wen-tao,XIE Wei-qing.Cartridge Case Surface Defect Detection System Design Based on Machine Vision[J].Journal of Ordnance Equipment Engineering,2016(2):105-108.
在弹壳生产过程中,由于冲压设备、加工工艺、原材料及化学成分等因素的影响,导致弹壳外观出现表面线痕、油渍、缺口、尺寸偏差等缺陷。从枪弹诞生到目前为止,枪弹外观品质检测方式基本上还是依靠手工测量和目视检测这种传统的检测方法。采用机器视觉技术对枪弹缺陷检测在国内已经开始研究[1-3],这也代表着枪弹外观品质检测的发展方向。
1图像采集
本系统采用了基于线阵相机采集图像的方式,这种方式采集到的弹壳表面图像为矩形形状,对缺陷的准确分割更容易,特征数值的计算也更方便。由于弹壳的弧形表面和材料的因素,光照射到表面上会产生强反光,弹壳轻微的摆动都会对进光量产生影响,普通的光源或单一的线光源并不能使弹壳表面亮度均匀。本检测系统采用了两个白色线光源从左右两侧对弹壳进行照明,照明方式如图1所示。其中一个主光源亮度较低,起主要照明作用,亮度低、弹壳微小摆动引起的变化量很小;另一个副光源亮度较大,作为光源补偿,提高图像的整体灰度。实际应用时,需要对光源的安装角度进行各种调整测试,才能确定相机和光源的最佳相对角度。弹壳被上方压弹壳机构压紧,弹壳下方旋转机构带动弹壳旋转,利用线阵相机对弹壳表面逐行进行连续扫描形成二维图像,达到对其整个表面进行完整图像采集的目的。
2缺陷分割
缺陷分割的目的是分割出弹壳表面图像的缺陷区域,只有分割出图像中的缺陷才能进一步进行分析处理,缺陷分割分为以下步骤。
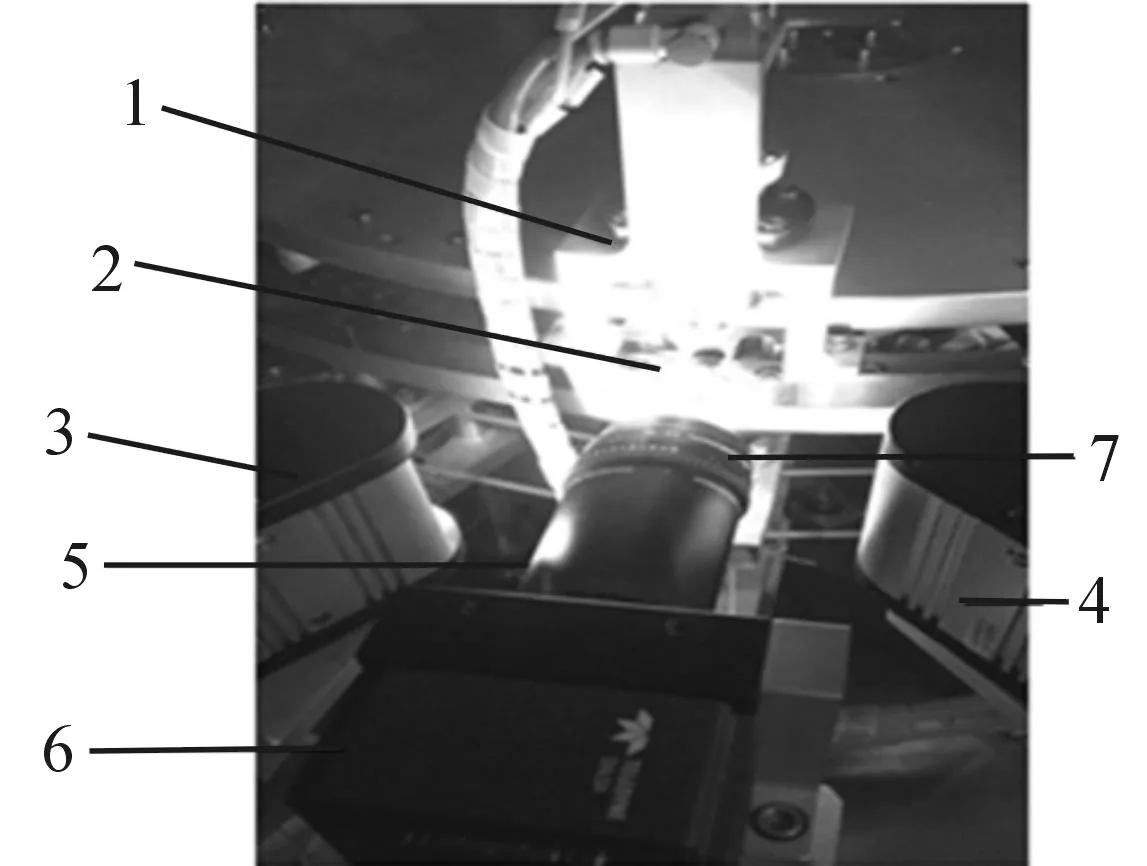
1.压弹壳机构; 2.成像线区域; 3.线光源;
2.1ROI区域检测
感兴趣区域(region of interest,ROI)检测的目的是在采集到的原始图像中对需要的图像区域进行划分,减少后续检测算法的计算量。由于弹壳表面展开图为一张矩形图像,所以只需要确定这张图像所占的行数与列数。
由于图像采集的过程中弹壳一直自转,图像呈现出首尾相接的现象,所以对于行的选择只需要选取连续固定行数。由于弹壳的全长不一,区域所占列数并不唯一,可以通过检测图像左右两个边缘进行列区域划分。其中一条列为弹壳的口部边缘,另一条列为弹壳的底槽上边缘,两条列之间为弹壳列区域。弹壳表面成像之后表面区域左右两条边缘都为直线,可以通过直线拟合[4]或Hough[5]线变换的方法对直线进行检测,从而得到列宽。
2.2高斯滤波
弹壳表面图像的噪声是随机产生的,其特点是噪声的大小和分布具有不规则性。高斯滤波是一种空间域滤波方法,既能去除噪声又能保护图像的边缘,可以得到很好的处理效果。高斯滤波模型如下
(1)
其中:u为均值(峰值对应位置);σ代表高斯函数标准差,单位为像素间距;x和y各有一个均值和标准差。
2.3图像分割算法
弹壳表面缺陷呈现特点为亮缺陷与暗缺陷。实际上一般暗缺陷或缺陷暗区域的灰度值与背景灰度分布范围紧紧相连,而亮缺陷或者缺陷亮区域的灰度级都非常高,与背景灰度值间断。针对这一特性,对亮暗缺陷可以采用不同的分割方法。由于图像整体灰度级都偏低,局部窗口内灰度均值也较低,可以采用局域阈值法分割暗缺陷;亮缺陷边缘梯度值较大,采用基于边缘检测的方法分割亮缺陷,该方法具有较强的自适应性。
2.3.1局部阈值法分割暗缺陷
局部阈值操作比较简单,通过计算像素点周围区域像素加权平均,然后减去常数得到自适应阈值,常数可以根据实际需求进行设定。采用对区域所有像素平均加权进行计算。该方法公式如下:size为窗口大小,e为减去的常数。
(2)
通常情况下窗口宽度应该大于被识别物体的宽度,才能取得较好的效果。由于局部自适应二值化是计算像素领域的平均灰度来决定二值化的阈值,所以对于光照不均的物体表面识别效果比较好。
2.3.2边缘检测法分割亮缺陷
边缘分割依赖于由边缘检测算子找到的图像边缘,是一种局部图像处理方法。边缘是灰度发生急剧变化的位置,是赋给单个像素的性质。边缘的幅值是梯度的幅值,所以图像整体灰度发生变化并不影响边缘的检测,适合于检测弹壳缺陷边缘。为了能准确地提取图像的边缘,采用最优的阶梯型边缘检测算子—Canny算子对图像进行边缘检测,它满足以下3个准则:信噪比准则、定位精度准则和单边响应准则[6,7]。Canny算法实现步骤如下:
1) 高斯平滑
将图像与尺度为σ的高斯函数作卷积,以模糊图像和消除噪声。
2) 计算梯度的幅值和方向
利用导数算子(如Prewitt算子、Sobel算子)找到图像灰度沿着两个方向的导数Gx、Gy,并求出梯度的大小和方向。
在实际操作过程中采用一阶偏导的有限差分来计算平滑后的数据阵列I(x,y)的梯度幅值和梯度方向。选取3×3的Sobel算子作为导数算子,其中,x和y两个方向偏导数阵列Gx(i,j)和Gy(i,j)分别为:
Gx(i,j)=[I(i+1,j+1)+2I(i+1,j)+
I(i+1,j-1)]-[I(i-1,j+1)+
2I(i-1,j)+I(i-1,j-1)]
(3)
Gy(i,j)=[I(i+1,j-1)+2I(i,j-1)+
I(i-1,j-1)]-[I(i+1,j+1)+
2I(i,j+1)+I(i-1,j+1)]
(4)
梯度幅值和方向计算式为:
(5)
(6)
3) 对梯度幅值进行非极大值抑制
为了精确定位边缘,需要梯度幅值图像中的“屋脊带”,只保留幅值局部变化最大的点,这一过程就是非极大值抑制。根据8邻接的模板算子将边缘方向量化为8个方向,对于每个非0幅值像素,考察由边缘方向指出的两个邻接像素,如果两个邻接像素的幅值有一个超过当前考察像素的幅值,则将当前考察像素标记出来删除。当所有的像素都考察过后,遍历图像,以0抹去所有标记过的像素。这一过程把梯度图像细化为一个像素宽。
4) 使用双阈值法检测和连接边缘
确定合适的两个阈值,由高阈值得到的边缘图像中的边缘都是真实边缘,但是边缘有间断。在真边缘间断像素处从由低阈值得到的边缘图像中寻找该点8邻接的边缘,利用递归跟踪的算法不断在低阈值得到的边缘图像中收集边缘,直到将边缘的间隙都连接起来。
2.4亮暗区域拼接方法
对于特殊的缺陷,比如穿孔,该类型缺陷完整的区域既包含亮区域部分又含有暗区域部分,需要对两部分进行区域拼接,达到对缺陷准确分割的目的。
采用分割算法对缺陷的暗区域和亮区域分别进行分割之后得到了各自的二值化图,然后对这两张图进行相加,得到整个缺陷的完整区域。将该图与原图像进行“位与”运算,就能得到完整的缺陷灰度图像。这样得到的缺陷图像的灰度信息也被保留了下来,有利于缺陷灰度特征的提取。
图3以穿孔缺陷图像为例,依次给出了各步骤处理之后的实际效果图。基于上述各个环节图像处理算法,本系统中采用的分割缺陷的完整的图像处理算法如图2所示,输入为采集到的弹壳表面图像,输出为缺陷图像。

图2 缺陷分割算法流程
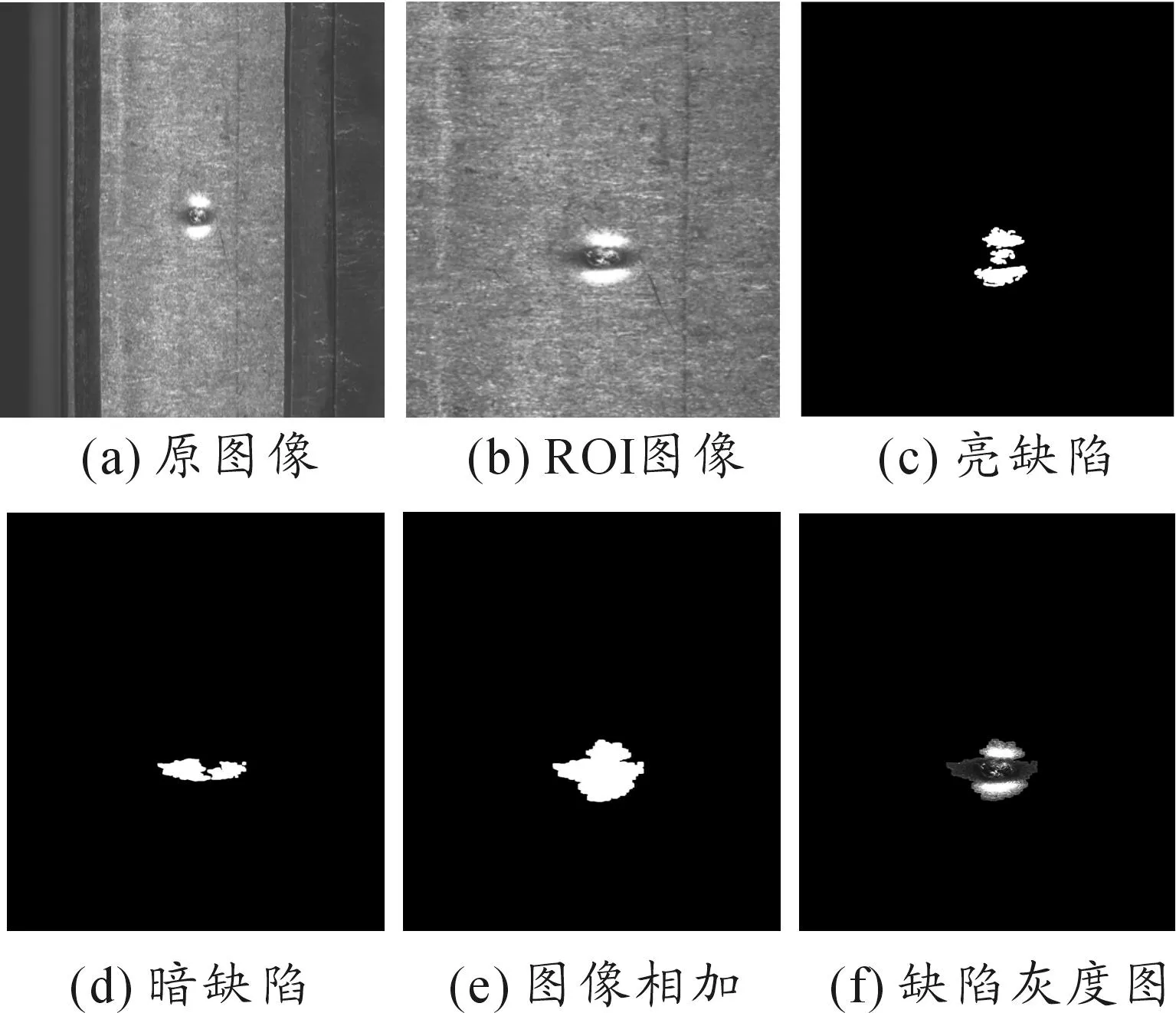
图3 穿孔缺陷分割各步骤图像
3缺陷分类
当通过分割算法得到图像中各个缺陷目标后,就应该采用模式识别算法对目标缺陷进行识别。
3.1缺陷特征提取
缺陷识别的前提是特征提取,图像特征提取和选择的目的是为了保证分类的准确性和快速性,需要选择在特征向量空间中类间距离大而类内方差小的特征,即不同类别的特征值距离较远,而同一类内的特征值致密聚集。弹壳表面缺陷的具有灰度差异,形状差异,几何差异等特点,并且缺陷大小是随机的,需要特征不随尺寸大小变化而变化,这里选择灰度特征、形状特征、几何特征来建立特征数据库[8-10],作为模式分类系统的输入特征向量,提取的特征量及计算公式如表1所示,其中WMER和LMER分别为MER(最小外接矩形)的短边和长边,(x0,y0)和(x1,y1)是一条长边上的两个点,A0和AMER为缺陷和MER的面积,f(i,j)是缺陷在像素点(i,j)的灰度值。
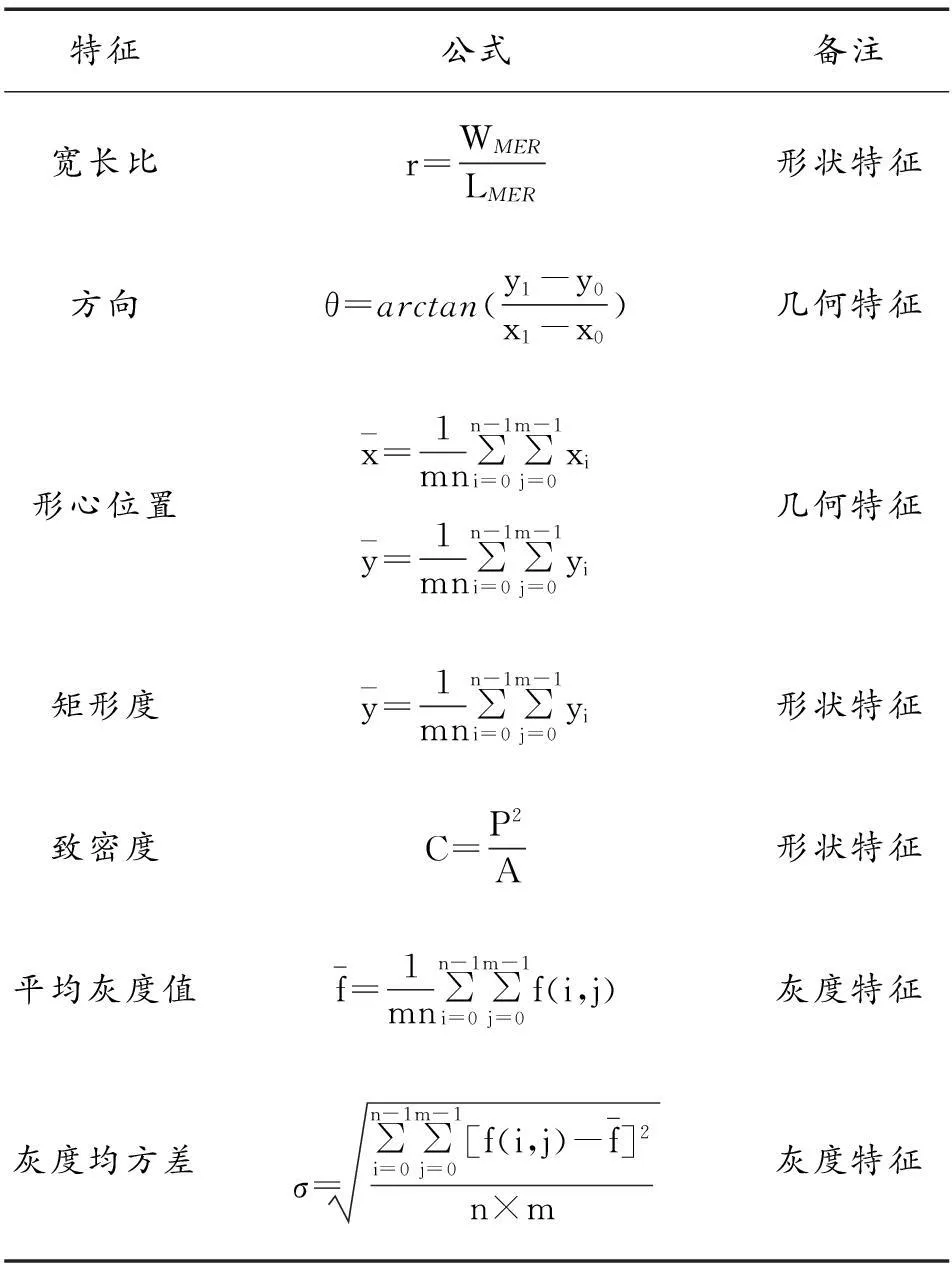
表1 缺陷特征描述
3.2分类器设计
模式识别又常称为模式分类,即采用某种处理算法或规则将模式分为其所属类别的过程。
支持向量机(support vector machine,SVM)是在统计学理论基础上发展起来的一种统计学方法,原本是为线性可分的两类问题提出的,后来通过引入核函数的方法解决了非线性分类问题,结合多个二分类器得到多类问题的分类[11]。
设有一组n维特征向量x和其类别标签w。通过定义可区分的超平面得到两类的判别函数w·x+b=0。为了最大化间隔,定义两个平行的超平面w·x+b=1,w·x+b=-1,经过支持向量,并且它们之间没有训练模式。则对于所有的训练模式xi必须满足下面的不等式:
(7)
这个超平面的距离是2/‖w‖。为了最大化间隔,需要最小化‖w‖,运用拉格朗日原理表述这个最小化问题,从而简化优化过程,最后计算可得到判别函数为
(8)
使用核技巧可以把这种方法推广到非线性可分的问题中。线性支持向量分类器的点积可以用非线性核函数来代替
(9)
产生的判别函数是
(10)

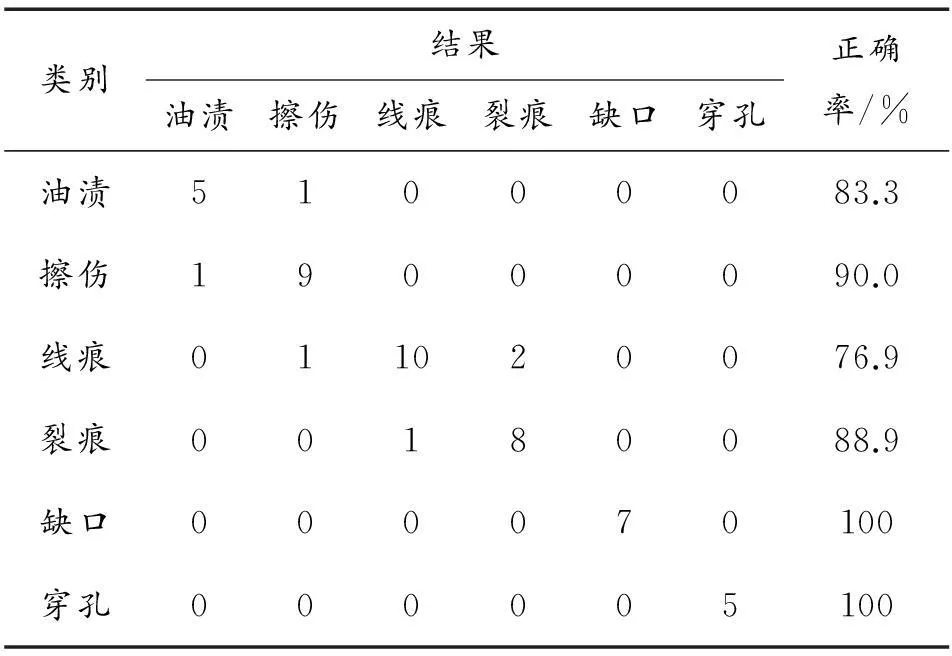
表2 支持向量机分类结果
4结论
采用机器视觉技术检测枪弹外观缺陷对于降低人工劳动强度、提高检测效率和产品品质等有重要意义。本研究从图像采集、图像分割、模式识别3个方面介绍了弹壳缺陷检测解决方案。试验表明,该设计方案成功实现了亮、暗缺陷的准确分割,对缺陷的分类也取得了很好的分类效果。
参考文献:
[1]张亚军,齐杏林,董成基.机器视觉下基于灰度值形态学的枪弹钢芯表面检测[J].四川兵工学报,2012,33(6):59-61.
[2]苟文韬,诸洪,刘彬,等.一种基于自适应阈值的弹壳表面缺陷分割方法[J].四川兵工学报,2015,36(1):122-123.
[3]孙文缎,叶玉堂.基于线阵相机采集平台的枪弹表面质量检测技术[J].兵工自动化,2013,32(1):87-90.
[4]党兴菊,吴文良.最小二乘法拟合直线公式的初等推导[J].重庆科技学院学报,2010,12(4):184-187.
[5]CHUTATOPE O,GUO Linfeng.A modified Hough transform for line detection and its performance[J].Pattern Recognition,1999,32(2):181-192.
[6]张德丰.MATLAB数字图像处理[M].北京:机械工业出版社,2009:223-224.
[7]王植.一种基于Canny理论的自适应边缘检测方法[J].中国图像图形学报A辑,2004,9(8):957-962.
[8]张洪涛.钢板表面缺陷在线视觉检测系统关键技术研究[D].天津:天津大学,2008:62-64.
[9]李晓冬,康戈文.基于数字滤波器的镀锌板缺陷分割[J].电子科技大学学报,2005,34(3):389-391.
[10]刘洪江.基于机器视觉的毛杆缺陷检测技术的研究[D].广州:广东工业大学,2011:85-90.
[11]THEODORIDIS S,KOUTROUMBAS K.模式识别 [M].4版.北京:电子工业出版社,2010:81-97.
(责任编辑唐定国)
Cartridge Case Surface Defect Detection System Design Based on Machine Vision
GOU Wen-tao,XIE Wei-qing
(Southwest Automation Research Institute, Mianyang 621000, China)
Abstract:In order to improve the bullet defect detection process levels with the machine vision technology, we designed a complete set of solution include image acquisition way based on linear CCD, defects segmentation algorithms and defects classification algorithms. The results of the experiment show that this solution works well in defects segmentation and classification.
Key words:machine vision; bullet; surface defect; detection; classification
文章编号:1006-0707(2016)02-0105-04
中图分类号:TP391;TJ2
文献标识码:A
doi:10.11809/scbgxb2016.02.026
作者简介:苟文韬(1989—),男,主要从事机器视觉及模式识别研究。
基金项目:863计划(2014AA041604)
收稿日期:2015-08-18;修回日期:2015-08-29
本文引用格式:苟文韬,谢蔚卿.基于机器视觉的弹壳表面缺陷检测系统设计[J].兵器装备工程学报,2016(2):105-108.
【机械制造与检测技术】
猜你喜欢
数学小灵通(1-2年级)(2021年4期)2021-06-09
轻兵器(2020年2期)2020-02-25
轻兵器(2017年19期)2017-10-23
初中生世界·七年级(2017年9期)2017-10-13
少儿科学周刊·儿童版(2017年3期)2017-06-29
轻兵器(2017年2期)2017-03-10
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
企业导报(2016年10期)2016-06-04