
基于FPGA的智能流控交通灯设计
2016-04-11 14:59李恒毅赵欢刘芳李瑶
电脑知识与技术 2016年4期
关键词:智慧交通
李恒毅+赵欢+刘芳+李瑶
摘要:智能交通灯是智慧交通建设的重要方面,能够有效缓解现代城市日益增大的交通压力。该文通过对十字路口车流量的分析,提出了一种基于FPGA的智能流控交通灯的设计方案,能够有效地提高十字路口的通行效率。
关键词:FPGA;智能交通灯;智慧交通
中图分类号:TN317 文献标识码:A 文章编号:1009-3044(2016)04-0177-02
1 概述
当今中国私家车的拥有量剧增,原有的交通指挥系统越来越显得力不从心,其最大弊端在于指挥方式过于死板。在很多情况下,如果路口交通灯的控制时序一成不变,不但不能起到缓解交通压力的作用,反而因双向红绿交通灯持续时间固定造成更严重的拥堵[1]。以生活中常见的十字路口为例,在遇到交通高峰期的时候,某一道路方向通行压力很大,而另一方向线路车流量很小。如果不能够灵活调整两条线路的通行时间,那么就造成繁忙道路一侧拥堵严重,而空闲道路一侧白白浪费通行时间资源。这种情况不但增加了车辆运行的成本,而且也不利于建立节约型、环保型社会。如果能够通过实时监测两个方向的车流量,并以分析结果为依据来控制路口交通灯的亮灭时间,将会给交通指挥带来极大的便利,达到更加有效利用城市交通资源的目的[2]。为了实现这一目标,本文介绍了一种基于车流量监测的智能交通灯的设计思路,希望能够为“智慧交通”的建设贡献一份力量。
1 设计思路
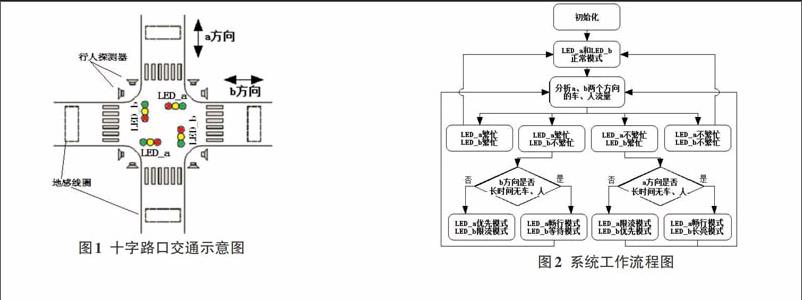
本文所设计的智能交通灯控制系统,是以普通十字路口为例(如图1)。南北方向(a方向)交通灯为LED_a,东西方向(b方向)交通灯为LED_b。在人行道路口处安装行人探测装置[3],用于感知是否有行人试图通过路口。并且在停车等待标线30米处埋设地感线圈,用于检测是否有车辆通过,并统计车流量[4]。
根据设计目标,智能交通灯控制系统分为两种工作状态,即自动工作状态和人工干预状态,其中人工干预状态优先级较高。当需要禁行或者人工控制某个方向的道路交通时,可以通过远程或现场操作的方法来实现控制。如果没有存在人工干预的情况,系统则进入自动工作状态[5]。
控制系统在自动工作状态下又分为五种工作模式:正常模式、优先模式、限流模式、畅行模式、等待模式。所对应的应用场景如下:
①正常模式。如果交通情况较为正常,a、b两个方向车流量相当,并且同时处于繁忙状态或不繁忙状态,此时两组交通灯按照正常预设时序工作。
②优先模式与限流模式。假设当a方向道路交通处于繁忙状态,而b方向道路交通处于不繁忙状态时。a方向交通灯将进入优先模式,通行时间会适当延长用来保证车流较大方向的通行。而b方向则进入限流模式,通行时间会相应缩短。
③畅行模式与等待模式。假设经过长时间统计a方向有车或行人通过,而b方向没有车辆或行人通过。那么LED_a将进入畅行模式,保持绿灯长亮;LED_b将进入等待模式,保持红灯长亮。通过行人探测器和地感线圈,检测两个方向是否有车辆或行人试图通过路口,以此作为工作模式切换的判断条件。采用这种设计的目的在于避免某方向无车、无行人情况所占用的通行时间。
实际中应用中需要根据车流状况在四种工作模式之间自动切换,从而达到灵活分配两个方向通行时间的目的。系统基本控制流程如图2所示。
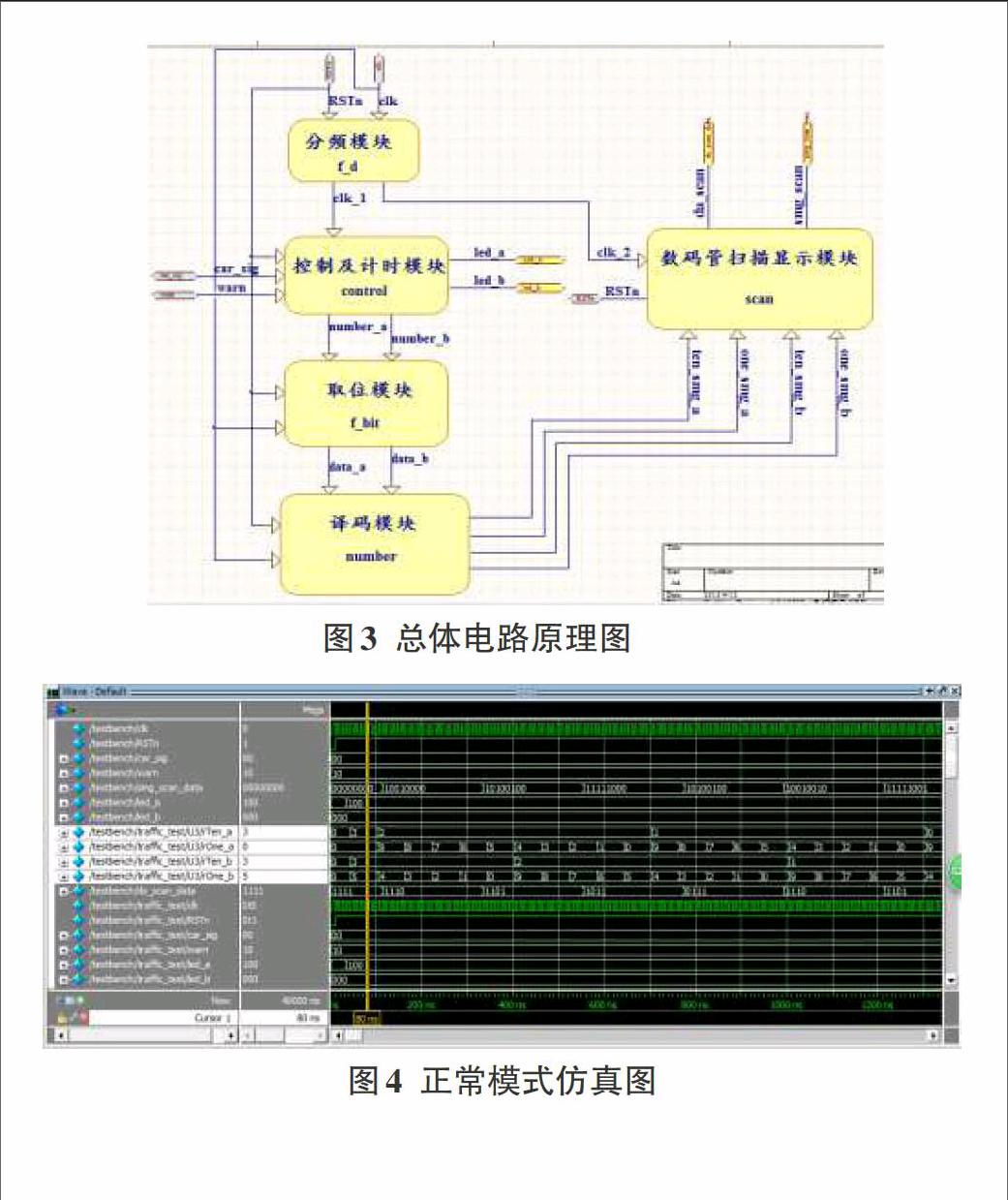
在以上设计思路的基础上,本文提出了一种基于FPGA平台的控制系统架构[6]。采用ALTERA公司CYCLONE IV系列的FPGA芯片,型号为EP4CE6F17C8。其功耗较低,而且引脚资源非常丰富便于系统今后的功能扩展。控制系统的核心部分包括:分频模块、控制及计时模块、取位模块、译码模块以及数码管显示扫描模块。所需输入信号包括全局时钟clk、系统复位信号RSTn、地感线圈信号car_sig以及行人探测信号warn。各个模块相互关联之后,构成了上述系统的基本运行架构,如图3所示。
分频模块将clk全局时钟频率转化为频率为1Hz的clk_1,供给控制及计时模块,用于信号灯的倒计时以及车流量统计计时;同时为数码管显示扫描模块提供clk_2,以满足数码管动态扫描所需要的时钟频率。
控制及计时模块负责整个系统的核心控制功能。接收到clk_1时钟后,模块根据car_sig和warn的输入信号,控制模块完成对车流计数、工作模式的转换,并输出内部状态机在每个时钟沿下对应的灯色编码。然后计时模块将当前灯色剩余时间提供给取位模块。
取位模块得到计时模块传来的时间数据,进行取位操作,得出十位以及个位的数据传给译码模块。
译码模块得到取位模块时间数据后,进行译码操作后,将译码数据传给数码管扫描显示模块。
数码管扫描显示模块接收到译码数据后,在分频模块供给的clk_2时钟上升沿的控制下输出译码,逐个显示在八段数码管上。
在此构架基础上编写了相关程序,编译成功后把程序文件进行ModelSim仿真测试。测试结果表明,控制系统能够自动切换工作模式以适应不同的交通状况,倒计时显示以及灯色转换均正常工作,较好地完成了设计目标,如图4。
参考文献:
[1] 蔡翠.我国智慧交通发展的现状分析与建议[J].交通工程,2013(6):224-227.
[2] 李盛春,孔令江,刘慕仁,等.智能交通灯对交叉路口交通流的影响[J].物理学报,2009(4): 2266-2270.
[3] 苏松志,李绍滋,陈淑媛,等.行人检测技术综述[J].电子学报,2012(4):814-820.
[4] 何志强,罗飞,于峰崎,等. 基于地磁传感器的车辆检测算法[J].科学技术与工程,2014(15):203-206.
[5] 杜红艳.基于PLC的智能交通灯控制系统设计[J].自动化与仪器仪表, 2014(2):60-62.
[6] 张晓荣,李永红.智能交通灯的设计及其 FPGA 的实现[J].传感器世界,2013(12):27-30.
