
基于多约束优化的电动汽车再生制动控制策略
2016-04-17 11:14郑伟胜周艳红杨兆万杨辉华
桂林理工大学学报 2016年4期
郑伟胜,周艳红,杨兆万,杨辉华,3
(1.桂林电子科技大学电子工程与自动化学院,广西桂林 541004;2.华中科技大学生命科学与技术学院,武汉 430074; 3.北京邮电大学自动化学院,北京 100876)
基于多约束优化的电动汽车再生制动控制策略
郑伟胜1,周艳红2,杨兆万2,杨辉华1,3
(1.桂林电子科技大学电子工程与自动化学院,广西桂林 541004;2.华中科技大学生命科学与技术学院,武汉 430074; 3.北京邮电大学自动化学院,北京 100876)
针对前后轮独立驱动纯电动汽车再生制动过程的控制问题,提出了一种基于多约束优化的再生制动控制策略。通过对汽车动力学的分析,并考虑能量回收所涉及的电机、电池组特性的影响,在保证制动过程安全可靠的前提下,结合再生功率流路径上各部件的运行效率和边界约束,以制动系统总效率最大化为目标优化前后电机的再生制动转矩分配,达到最大化回收制动能量的目的,并与原车的简单逻辑控制策略进行仿真对比,结果表明了该控制策略的有效性。
汽车动力学;多约束优化;制动力分配;效率最大化
0 引言
传统汽车在城市道路行驶过程中有相当部分的能量由于制动转化为热量而消耗掉[1],而电动汽车能够对制动能量进行回收并存储在动力电池组中。研究表明,在不同的行驶循环以及控制策略中,再生制动可回收8%~25%的能量[2]。再生制动控制系统设计主要围绕两个基本的问题:第一是所需的总制动力如何在摩擦制动力和再生制动力之间分配,以回收尽可能多的制动能量;第二是前后轮上的制动力该如何分配,以实现制动过程的稳定性[3]。目前国内外对于电动汽车再生制动的研究大多集中在车身的稳定性控制方面。针对如图1所示的前后轮独立驱动结构电动汽车:文献[4]研究了其在低附着路面下的再生制动控制问题,以前后车轮的滑移率作为控制变量,最大限度地利用轮胎和路面间的附着系数,保证制动时车身的稳定性;文献[5]采用模糊控制策略,以制动强度和电池SOC(state of charge,荷电状态)作为输入,计算出再生制动力占总制动力的比例;文献[6-7]对车轮在制动过程中的抱死情况进行分析,对再生制动力进行限制,防止车轮在制动过程中抱死,保证车辆制动稳定性;文献 [8]分析了再生制动的引入对ABS系统(anti-lock brake system,制动防抱死系统)的影响,依据ECE制动法规对前后轮的制动力进行约束,控制车轮总是处于非抱死状态,进而保证制动安全。
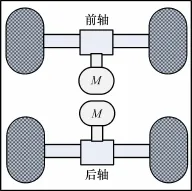
图1 前后轮独立驱动电动汽车Fig.1 Front and rear wheel independent drive electric vehicle
电动汽车再生制动过程中动能由驱动轮输入,经电机转换为电能,最后存储到电池中。能量流动过程涉及车身、电机以及电池的状态。要想控制好再生制动过程,就必须考虑各部件的状态及约束条件。因此,本文提出了一种多约束优化控制策略。在保证制动过程平稳、安全的前提下,充分考虑再生功率流路径上各部件的运行效率和边界约束,以再生制动总效率最大化为目标,优化前后轴电机的转矩分配,并在AMESim中建立电动汽车整车模型、Simulink中建立优化控制系统模型,AMESim和Simulink进行联合仿真。同时,在AMESim中进行UDDS(urban dynamometer driving schedule,城市测功机行驶循环)实际工况模拟,根据电池组的SOC消耗水平对所制定的控制策略进行评价。
1 汽车制动系统性能分析
汽车制动系统的作用是快速降低车速,同时保持车辆行驶的稳定性以及在各种路面条件下的可控性。要求尽量缩短制动距离、防止车轮抱死和侧滑情况的出现,这些要求是通过在车轮上施加足够的制动力,并且在前后轮上合理分配总制动力来实现的。
1.1 制动过程动力学分析
假设汽车行驶在平坦路面上,当其制动时车辆的受力情况如图2所示。与车辆制动力相比,其所受滚动阻力和空气阻力的值都很小,在分析中对其进行忽略。
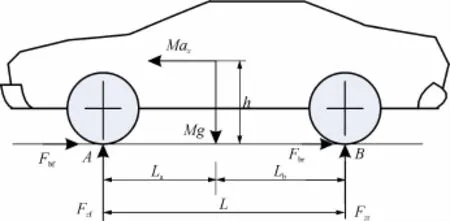
图2 汽车制动受力示意图Fig.2 Schematic diagram of automobile brake force
设ax是车辆制动时的负加速度,根据牛顿第二定律可得

其中:Fbf和Fbr分别是作用在前后轮上的制动力,M为汽车总质量。汽车所能产生的最大制动力受制于轮胎和路面间的最大附着系数μ,且正比于轮胎的垂直载荷Fz。所以汽车总的最大制动力为

在制动过程中,由于受到负加速度的影响,将会有载荷从后轴转移到前轴,使得前后轮垂直载荷发生变化。根据车辆前后轮与接地点A和B之间的力矩平衡关系,可得前后轮上的垂直载荷Fzf和Fzr分别为
其中:h为车辆质心高度;La和Lb分别为质心与前轴和后轴的距离。
汽车转弯时,由于离心力的存在,将会产生侧倾力矩,使得载荷在左右轮之间发生转移。该力矩在前、后轴上的分配比例跟前、后载荷分配有关。汽车转弯时前轴受力情况如图3所示。
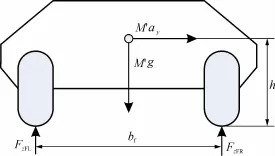
图3 汽车转弯时前轴受力情况Fig.3 Front axle steering force
此处假设汽车前后轴之间不存在耦合关系,则前轴的等效质量M'为

根据力矩平衡关系得到

将式(3)中前轮载荷Fzf、式(5)中的等效质量M'代入式(6),即可求得右前轮轮胎对地垂直载荷FzFR为

类似地,可以求得其他3个轮胎的对地垂直载荷


式中:bf为车辆前轴轮距;br为车辆后轴轮距。再根据式(2)即可计算得到汽车各轮的最大制动力。
1.2 理想制动力分配
根据上述汽车制动过程动力学的分析,当作用于前后轴上的制动力正比于其各自的垂直载荷时,前后轴的制动力分配比例即为理想制动力分配比例(式(11)),通常称之为I曲线,如图4所示。


图4 汽车前后轮制动力分配曲线Fig.4 Brake force distribution curve of front and rear wheels
因此,如果想在任何路面条件下,使得车辆的制动性能最好,则制动力在前后轮上的分配应遵循I曲线。
1.3 实际制动力分配
尽管以理想制动力分配的制动系统性能最好,但由于传统摩擦制动系统响应缓慢,如果车辆的制动力分配完全遵循理想制动力分配曲线,将会使制动系统的结构和控制变得极为复杂。因此,大部分传统汽车的实际制动力分配通常被设计成一个不变的线性比例关系,称之为β线,如图4所示。其定义为
由此可知摩擦制动系统产生的施加于前后轴的实际制动力为

1.4 ECE制动规程
在汽车制动过程中,如果后轮先制动住,此时由于后轮胎承受横向力的能力为零,汽车易发生侧滑;而当前轮抱死时,将失去转向能力。因此制动系统的设计应该保证后轮不会较前轮先抱死,即要保证汽车制动过程的稳定性,则实际制动力分配β线应该处于I曲线的下方(图4)。
当β线比I曲线低很多时,只有很少的制动力作用于后轮,这样将不能有效利用路面附着力。因此欧洲经济委员会制定了ECE制动法规,该法规对汽车前后轮的制动力提出了明确要求[9],规定了作用在后轮上的最小制动力:

其中,ax是前轮在附着系数为μ的路面上抱死时车辆的负加速度,此时前轮抱死,其制动力为Fbf= Fzf·μ。
2 多约束优化再生制动控制策略
再生制动过程涉及到车身状态、驱动电机及电池特性的影响,因此必须充分考虑如下约束关系:①ECE制动法规中对前后轮制动力分配所作出的规定,即应满足式(14)的要求;②电机所能提供最大制动力的约束;③由电池充电特性所决定的最大再生制动力的约束。由于所研究车型配备的是并行式再生制动系统,其前后轮的摩擦制动力分配关系不可调,所以再生制动控制策略的重点是在几种约束条件下寻找一组优化解,优化分配前后轴电机的制动扭矩,使得回收的能量最大。
2.1 牵引电机特性约束
电动汽车牵引电机的典型特性曲线如图5所示。
电机由零转速起动,当转速升至基速时,电压升至额定值,而磁通保持常值。在该转速范围内,电机产生恒定转矩。当电机转速超过基速后,电压保持为常值,而磁通被削弱,此时输出功率恒定,转矩随转速呈双曲线下降。电机在不同转速下的最大输出转矩不同[10],为车辆起步以及初始加速提供大转矩,同时也为车辆高速巡航、超车提供后备功率。
车辆处于再生制动工况时,电机运行于发电模式。此时电机可输出的最大制动转矩是转速的函数
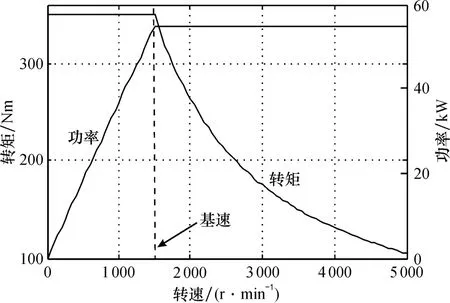
图5 牵引电机典型外特性Fig.5 Typical characteristics of traction motor
其中:ωb为电机的基速;ωm为电机的实时转速; PM为电机的额定功率;TM-max为电机的最大再生制动转矩。因此驱动电机提供的制动力为

其中:ig为电机主减速器传动比;r为驱动轮滚动半径;ηt为驱动系的传动效率。
2.2 动力电池特性约束
动力电池组作为电动汽车的储能单元,其充放电特性直接影响着整车的动力输出和能量回收能力。电池的电化学单元等效电路模型[11]见图6。其中:Cs为储能电容,表征电池剩余电量;Rs为电池自放电电阻;RdCd并联回路表征电池扩散电荷变化,其电压Ud与扩散电荷成正比;电压E为电池的开路电压,R为电池欧姆内阻[12]。

图6 电池等效电路模型Fig.6 Equivalent circuitmodel of battery
当电池组处于充电模式时,其充电电流、充电功率、电池组SOC都成为再生制动能量回收的约束条件。结合等效模型和充电电流可计算出充电功率
其中,S为拉普拉斯变量。由电池可允许最大充电电流可计算出电池最大允许充电功率Pbat。由此,电池充电功率约束下的最大再生制动力为

式中:v为车速;ηb为电池充电效率。
2.3 多约束再生制动优化控制
车辆制动时再生制动力附加在摩擦制动力之上,前后轮总的制动力由摩擦制动和再生制动共同提供。根据前文对制动性能的分析可知,为保证制动的稳定性,汽车前后轮之间的制动力分配必须处于I曲线和ECE曲线之间,即由式(11)和式(14)确定的约束关系:

将式(1)分别代入式(14)和(19),可得
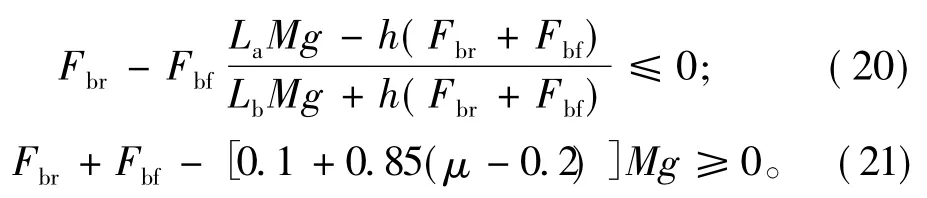
结合电机特性及电池特性的约束,再生制动过程的多约束优化问题可描述如下:
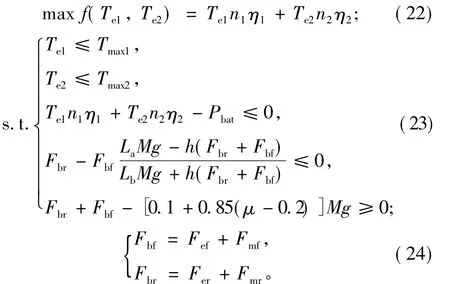
其中:式(22)以总回收功率为目标函数,式(23)为约束方程组;Te1和Te2分别为前后电机的制动转矩;n1和n2分别为前后电机的转速;η1和η2分别为前后电机的效率;Tmax1和Tmax2分别为前后电机在当前转速下的最大转矩;Fef、Fer分别为前后电机制动力,由制动转矩换算而来;Fmf、Fmr分别为前后轮的摩擦制动力。本再生制动优化分配策略旨在寻找一组解,使系统回收的能量最大化,基本流程如图7所示。
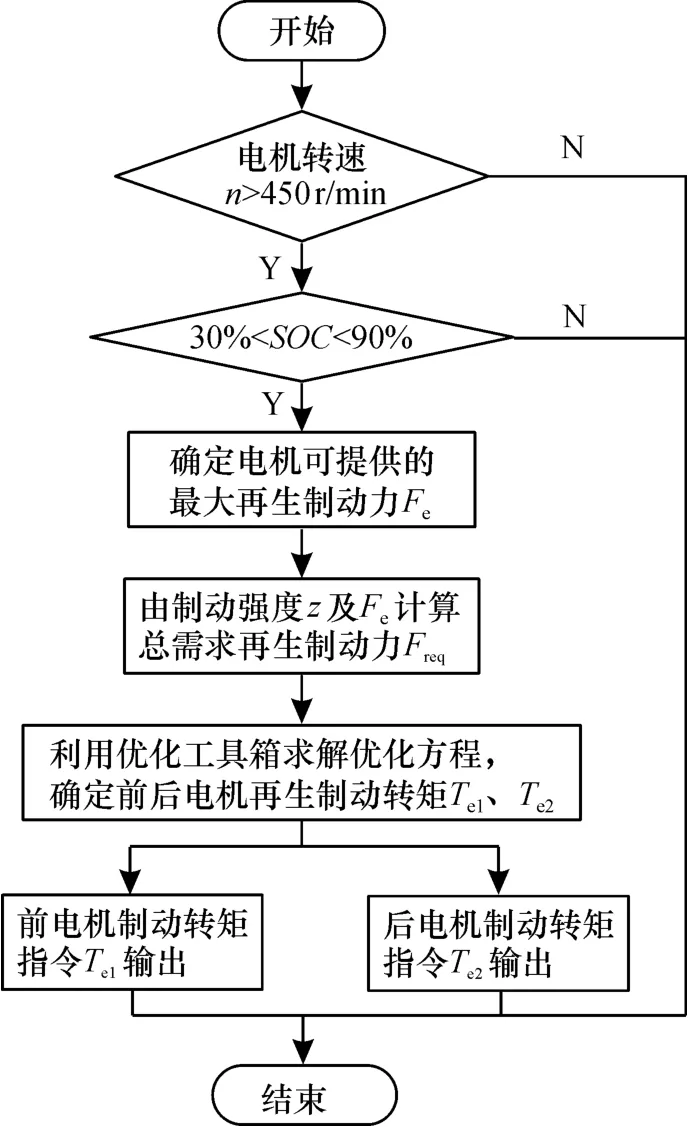
图7 再生制动优化控制流程Fig.7 Flow chart of regenerative braking optimal control
控制实施过程为:①当检测出制动意图时,先判断电机转速和电池SOC是否满足再生制动启动条件。此处将判断条件设为n>450 r/min、40%<SOC<80%。②查表得到电机能提供的总的最大制动力Fe,再由制动踏板解析出制动强度z,求得电机总的需求制动力Freq=Fe·z。③由制动油缸压力传感器得到此时摩擦制动力的大小Fbf和Fbr,再根据式(22)~(24)的优化方程,使用Matlab全局优化工具箱[13]计算当前转速下前后电机的制动转矩分配,使得两电机总的发电功率最大,即最大化回收制动能量。
3 仿真分析
前后轮独立驱动电动汽车的主要参数见表1。根据上述对车辆动力学的分析,在多领域仿真软件AMESim中建立整车模型,包括底盘模型,由电机、电池等组成的传动系模型,驾驶员模型以及轮胎模型等,所建立的模型如图8所示。同时,在Simulink中根据本文所提出的控制策略建立了电动汽车的控制系统模型,包括驱动控制和再生制动控制两部分,所建立的模型如图9所示。其中优化求解部分使用Matlab的全局优化工具箱实现。通过联合仿真技术实现 AMESim和 Matlab的联合仿真[14],即用Simulink中的控制系统去控制AMESim中的汽车模型。
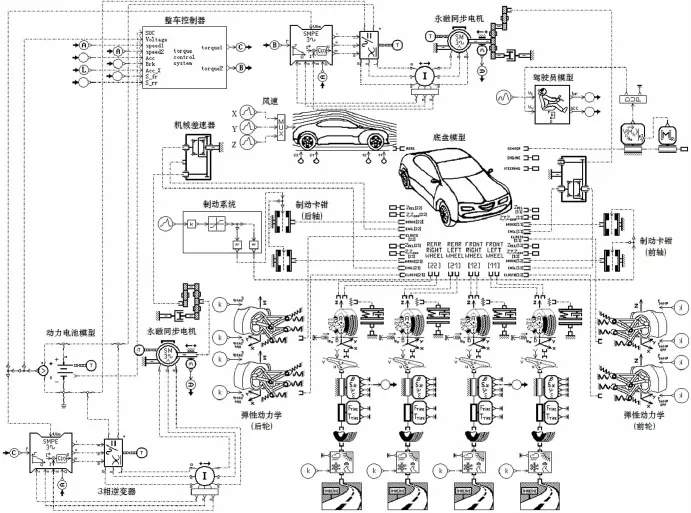
图8 AMESim中建立的电动汽车仿真模型Fig.8 Electric vehicle simulation model built in AMESim
选择美国城市行驶循环UDDS作为仿真工况,如图10所示。该循环工况使用汽车行驶速度与时间历程关系来描述城市道路的行驶工况,持续时间为1 370 s。本文所提的控制策略与原车的常规逻辑控制都使用此循环工况进行对比测试,仿真时将UDDS的速度曲线输入到AMESim的驾驶员模型中,使汽车模型的行驶速度跟随UDDS的工况速度,通过与原车的常规逻辑控制相比,验证所制定多优化再生制动控制策略的有效性、电池组SOC的消耗水平以及前后电机制动转矩的分配情况。
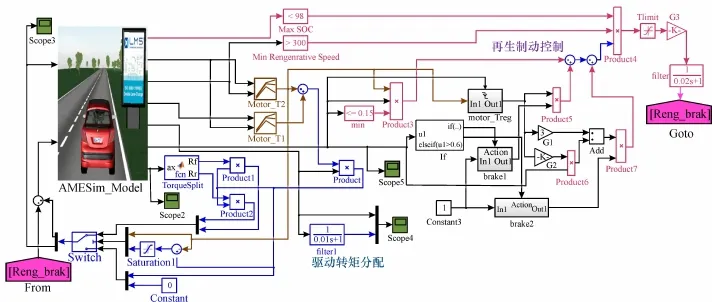
图9 Simulink中建立的控制系统模型Fig.9 Control system model built in Simulink

表1 仿真车辆参数Table 1 Simulation vehicle parameters
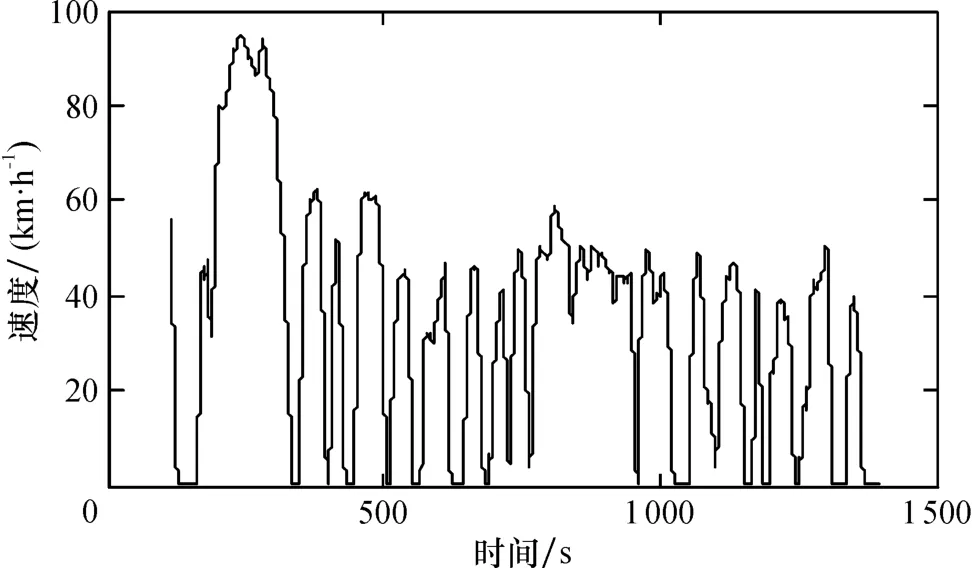
图10 UDDS城市行驶循环Fig.10 UDDS urban driving cycle
仿真中前后电机的转矩分别如图11和图12所示,其中负转矩为再生制动转矩。
可以看出,当车辆制动时,由于载荷会向前轴转移,导致控制策略分配给前轴电机更多的制动转矩。同时存在摩擦制动,以及制动力分配的安全性约束,决定了电机的再生制动不可能全部分配到前轴或后轴。此时控制策略以总效率最大为目标进行分配。
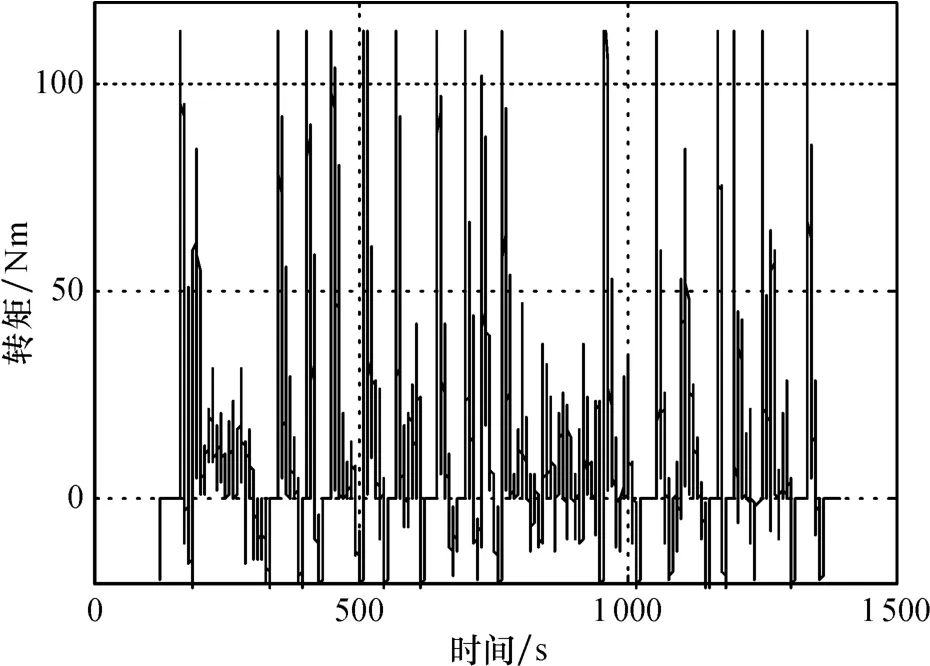
图11 前轴电机实时转矩Fig.11 Frontmotor real time torque

图12 后轴电机实时转矩Fig.12 Rearmotor real time torque
电池组SOC如图13所示。使用本文制定的并行再生制动控制策略,电池组SOC下降缓慢,能够回收更多的制动能量,比原车的简单逻辑再生制动策略有明显的提高,延长了电动汽车的行驶距离。
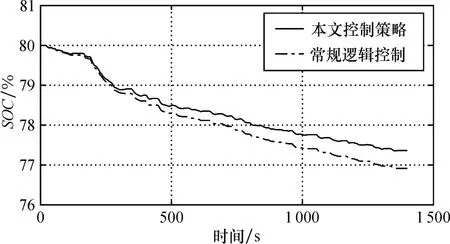
图13 电池组SOC对比Fig.13 Comparison of battery SOC
4 结论
针对前后轴独立驱动电动汽车并行再生制动的控制问题,首先进行了车辆动力学特性以及制动能量回收链路上主要部件的特性分析,并以此为基础制定了并行再生制动优化控制策略。在保证汽车制动安全的前提下,运用控制策略优化分配前后轴电机的制动转矩,使制动系统总的回收效率最高,达到最大限度回收制动能量的目的。仿真结果表明:本控制策略在频繁制动停车的城市行驶工况下的制动能量回收比原车简单逻辑控制具有较明显的效果,验证了制动力优化分配策略的有效性。
[1]Rajashekara K.Power conversion and control strategies for fuel cell vehicles[C]//Industrial Electronics Society,2003.IECON'03.The 29th Annual Conference of the IEEE,2003,3:2865-2870.
[2]ZolotM,Markel T,Pesaran A.Analysis of fuel cell vehicle hybridization and implications for energy sorage devices[C] //4th Advanced Automotive Battery Conference,San Francisco,2004:121-124.
[3]EhsaniM,Gao Y M,Emodi A,等.现代电动汽车、混合动力电动汽车和燃料电池车——基本原理、理论和设计[M].2版.倪光正,倪培宏,熊素铭,译.北京:机械工业出版社,2010:353-354.
[4]王耀南,刘东奇.电动汽车机电复合制动力分配策略研究[J].控制工程,2014,21(3):347-351.
[5]Mutoh N.Driving and braking torque distribution methods for front-and rear-wheel-independent drive-type electric vehicles on roadswith low friction coefficient[J].IEEE Transactions on Industrial Electronics,2012,59(10):3919-3933.
[6]张京明,刘金龙.电动客车并行复合再生制动控制策略[J].机械设计与制造,2014(9):11-12,18.
[7]Liu JL,Zhang JM,Xue M Z.A novel parallel regenerative braking control strategy[J].Journal of Applied Science and Engineering Innovation,2014,1(4):260-267.
[8]Ko JW,Ko SY,Kim IS,et al.Co-operative control for regenerative braking and friction braking to increase energy recovery withoutwheel lock[J].International Journal of Automotive Technology,2014,15(2):253-262.
[9]刘丽君,姬芬竹,杨世春,等.基于ECE法规和I曲线的机电复合控制控制策略[J].北京航空航天大学学报,2013,39(1):138-142.
[10]卢东斌,欧阳明高,谷靖,等.电动汽车永磁同步电机最优制动能量回馈控制[J].中国电机工程学报,2013,33 (3):83-91.
[11]冯旭云,魏学哲,朱军.MH/Ni电池等效电路模型的研究[J].电池,2007,37(4):286-288.
[12]Husain I.纯电动及混合动力汽车设计基础[M].2版.林程,译.北京:机械工业出版社,2012:94-95.
[13]周雪刚.非凸优化问题的全局优化算法[D].长沙:中南大学,2010.
[14]王吉,李建华,靳立强,等.基于AMESim与Simulink/ Stateflow的汽车ABS联合建模与仿真研究[J].汽车技术,2010(1):25-28.
Regenerative braking control of electric vehicles based on multi-constrained optim ization
ZHENGWei-sheng1,ZHOU Yan-hong2,YANG Zhao-wan2,YANG Hui-hua1,3
(1.College of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin 541004,China;2.College of Life Science&Technology,Huazhong University of Science and Technology,Wuhan 430074,China; 3.College of Automation,Beijing University of Posts and Telecommunications,Beijing 100876,China)
Aiming at regenerative braking process for the frontand rearwheels independent drive type of electric vehicles,a control strategy of regenerative braking based onmulti-constraintoptimization is presented in this paper.In this strategy,not only the vehicle dynamics,the characteristics of the motor and the battery pack involved in the energy recovery are taken into account,but also the efficiency and constraints of the components on the regenerated power flow path,which is under the premise of guaranteeing the safety and reliability of the braking process.In order tomaximize the energy recovery from the regenerative braking,optimal distribution of the regenerative braking torque between the front and rearmotor is presented based on objective ofmaximizing the total efficiency of the regenerative braking system.Simulation comparison with the simple logic control strategy is carried out,and the results show the effectiveness of the control strategy.
vehicle dynamics;multi-constrained optimization;distribution of braking force;maximum efficiency
TP273.5
:A
2015-09-23
国家自然科学基金项目(61263013)
郑伟胜 (1987—),男,硕士研究生,研究方向:模式识别与智能系统、电动汽车控制,534033905@qq.com。
杨辉华,博士,教授,13718680586@139.com。
郑伟胜,周艳红,杨兆万,等.基于多约束优化的电动汽车再生制动控制策略[J].桂林理工大学学报,2016,36 (4):830-837.
1674-9057(2016)04-0830-08
10.3969/j.issn.1674-9057.2016.04.031
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
数学年刊A辑(中文版)(2020年1期)2020-05-19
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年1期)2016-04-16
人生十六七(2015年6期)2015-02-28
中国塑料(2014年12期)2014-10-17
计算机辅助工程(2012年5期)2012-11-21
