基于S模式ADS-B数据解码算法研究
2016-04-20 02:50民航内蒙古空管分局白志刚
电子世界 2016年6期
关键词:S模式
民航内蒙古空管分局 白志刚
基于S模式ADS-B数据解码算法研究
民航内蒙古空管分局 白志刚
【摘要】广播式自动相关监视系统(ADS-B)作为空管系统对空监视的一种重要手段,相比传统二次监视雷达系统具有成本低、精度高和数据更新速度快等优点。1090兆赫扩展电文广播式自动相关监视系统作为国际民航组织推荐的唯一标准,是未来ADS-B系统的发展趋势。以实际监视数据为研究对象,对ADS-B数据的解码算法进行研究,从底层加深对ADS-B系统的理解与认识。
【关键词】S模式;ADS-B;数据解码;CPR算法
0 引言
近年来中国民航业呈井喷式发展,对空中交通管制系统的保障能力提出了极高的要求。作为管制员的“千里眼”,对空监视系统早已成为空管运行中不可缺少的工具。广播式自动相关监视系统(ADS-B)和二次雷达系统均是实现对空监视的重要手段,且ADS-B系统以其成本低、精度高以及监视数据更新速度快等优点,逐步成为监视新技术运用的核心。ADS-B对提升空域容量、优化航路设置和缩小航空器间隔有重要作用,且在传统雷达无法覆盖区域,比如沙漠、海洋等区域,可提供可靠的飞行器监视服务,有效增加监视空域的覆盖范围。
1090兆赫扩展电文(1090MHz ES)ADS-B系统是基于Mode S数据链的一种ADS-B 技术。作为国际民航组织唯一推荐的一种模式,该系统通过GNSS机载设备的支持,按固定速率自动广播飞行器当前状态信息、模式信息、目标信息等,从而实现监视、导航、敌我识别等功能。
本文研究了Mode S数据链ADS-B系统接收数据译码的关键算法,对飞行器空中位置信息、空中速度等重要状态信息的译码算法进行详细论述。
1 简介
1.1 模式S数据链ADS-B系统
ADS-B系统有三种架构,分别是基于VDL-4数据链、UAT数据链和Mode S数据链的ADS-B系统。Mode S数据链ADS-B系统的数据传输带宽高达1M Bits/s,是国际民航组织(ICAO)唯一推荐的标准,是ADS-B系统未来发展的趋势。
1090 ES (1090 MHz Extended Squitter)是基于S模式应答机的一种技术。它的下行频率是1090MHz,数据传输采用脉冲位置编码。1090 ES用发射机和发射天线来传送不同的消息,包括24比特码、高度、呼号等。由于消息长度的限制,每次传送的消息只能包含有限的信息,所以需要通过多次传输消息才能获得完整的飞行器信息。然而消息的更新率却比传统二次雷达系统高很多,比如重要的位置消息和速度消息每0.4~0.6秒就会更新一次,而次重要的标识消息和类型消息每4.8~5.2秒更新一次,意向改变消息每1.6~1.8秒更新一次。接收机将飞行器送来的位置、速度、标识等信息,按照一定格式编码汇总,形成标准的ADS-B报告(包括状态报告、模式报告和速度报告),并以脉冲位置编码的数据格式发送至ADS-B数据用户。
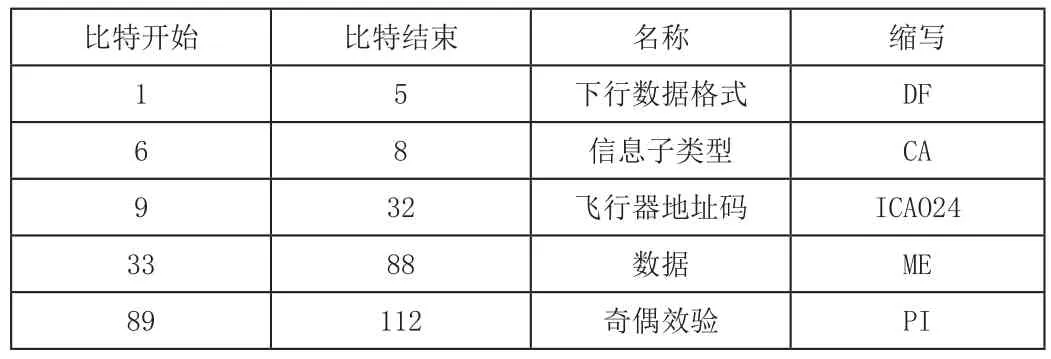
表1 ADS-B消息结构

表2 空中位置信息ME字段结构
1.2 ADS-B消息结构
一条ADS-B消息长度为112个比特序列。表1为 ADS-B 消息的基本结构。Bit 1~5为下行链路格式域(DF),DF=17格式表示S模式应答机发射的ADS-B消息;Bit 6~8为CA域,表示S模式应答机能力;Bit9~32总共24个比特为AA域,表示应答机24比特ICAO地址;Bit 33~88总共56个比特为ADS-B消息域ME,承载飞行器报告的重要状态信息。ME字段中,前 5个比特为消息类型字段,紧接着的3个比特为消息子类型,剩余48个比特为消息具体内容。最后24比特为校验域 PI。
2 ADS-B消息解码
2.1 空中位置信息解码
空中位置信息包括编码后的经纬度和高度信息,其类型字段值为9到18。表2列出ME字段结构。
由于飞行器运动轨迹是连续的,不可能出现大跨度的跳跃,加之ADS-B位置信息广播速率高等因素,可得知位置信息中表示经纬度数据的高位比特必定变化缓慢。若每次都将完整位置信息广播的话,几乎不变化的高位比特会降低信息的传输效率,浪费有限的带宽资源。若将变化缓慢的高位比特在编码时进行忽略,可以提升传输效率,但也会造成相同的一组数据却可以对应全球多个位置,导致解码时不能正确确定飞行器的位置。为了解决这一问题,可以采用紧凑位置报告(CPR)算法来编码飞行器经度和纬度数据,CPR算法将经纬度信息编码为奇格式编码信息和偶格式编码信息,接收机如果在短时间内可以接收到上述两种编码信息,通过CPR算法解码,就可以计算出飞行器的精确位置。
当DF=17,TC=9到18时,数据帧所包含的信息为位置信息。以下为接收到的真实的ADS-B数据,数据1:8D40621D58 C382D690C8AC2863A7,数据2:8D40621D58C386435CC4126 92AD6。将其ME字段数据转为二进制后按结构划分,如下表:

表3 空中位置信息ME字段域对应数据
其中53bit(T位置)代表时间标记,第54bit(F位置)为0时代表偶格式编码,为1时代表奇格式编码。55到57bit代表CPR纬度,72到88bit表CPR经度。
解码算法如下:
(1)将奇格式编码和偶格式编码的CPR纬度和CPR经度数据归一化处理。
奇格式编码纬度:LATCPR_E= 92095 / 131072 = 0.7026
奇格式编码经度:LONCPR_E= 88385 / 131072 = 0.6743
偶格式编码纬度:LATCPR_O= 39846 / 131072 = 0.3040
偶格式编码经度:LONCPR_O= 125818 / 131072 = 0.9599
(2)计算纬度区域索引值j。

函数floor()代表取整,带入(1)中数据,得出j = 1。
(3)计算纬度Lat。

函数mod()代表取模。其中DLatE = 360 / 60,DLatO = 360/59,带入(1)和(2)中数据,得出RLatE = 10.2157745361328,RLatO = 10.21621445478026。接下来判断LatE和LatO是否在同一纬度区。若不在同一纬度区,表明飞行器正在跨越纬度区域飞行,数据不可解码,需要等待下一组接收到的数据。查表可知RLatE和RLatO在同一纬度区,根据公式:

可求得纬度Lat = LatE = 10.2157745361328。
(4)计算经度索引值。

函数NL()可通过查表得出,NL(LatE) = 59,NL(LatO) = 59,带入公式得出m = -39。
(5)计算经度。

其中ni = 58,带入数据,获得经纬度坐标为:
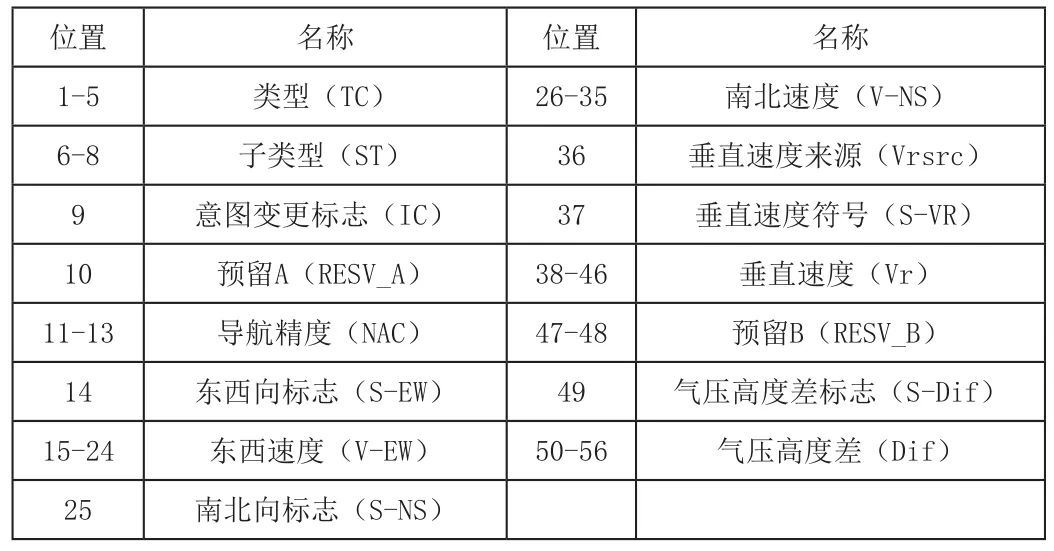
表4 空中速度消息子类1的ME字段结构
Lon = 123.889128586342
(6)计算高度。
高度编码格式如下:高度字段总长12比特,在“ME”字段域中为bit9~bit20,bit16为单位指示比特Q,当Q=0时,编码单位为100英尺,Q=1,编码单位为 25 英尺,编码范围为:-1000英尺至+50175英尺。不论奇偶数据帧,均包含高度码数据。
取出高度编码数据:110000111000,其中第8位比特为Q比特,移除Q比特后,编码数据变为11000011000,转换为十进制为N=1560。高度值计算公式为:

代入数据可得Alt = 1560 * 25 - 1000 = 38000 ft。
通过上述计算,我们最终获得飞行器位置的三个参数:经度、纬度、高度。
LAT:10.2157745361328
LAT:123.889128586342
ALT:38000 ft
2.2 空中速度消息解码
ADS-B空中速度信息格式有两种,一种是飞行器能够获知自身水平运动速度,在此情况下用子类型来区别是否是超音速速度报告,子类1表示亚音速,子类2则表示超音速;另一种是不能获得自身水平速度时广播的速度报告,子类3表示亚音速,子类4表示超音速。由于现有飞行器主要在亚音速飞行,所以在接收到的ADS-B速度消息中有95%以上为子类1,其结构如下表。
ME字段中,东西向标志表明速度矢量是向东还是向西,为0时向东飞;南北向标志表明速度矢量是向南还是向北,为0时向北飞。接收到的ADS-B数据:8D485020994409940838175B284F,按照表4将ME字段解码后各域数据对应如下表:
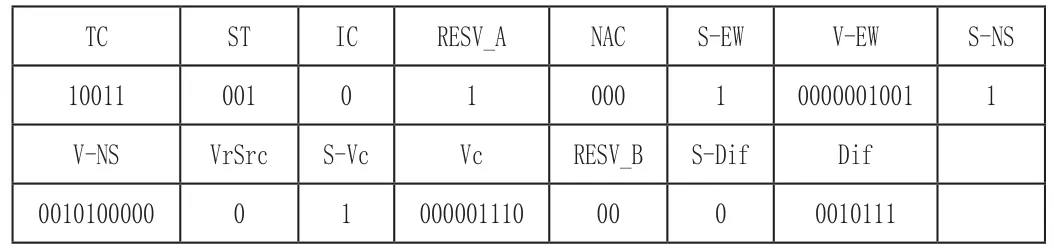
表5 空中速度消息ME字段域对应数据
(1)水平速度计算。
计算水平速度和方向需要四个参数,东西速度V(ew),东西速度标志S(ew),南北速度V(ns),南北速度标志S(ns)。速度V和方向H计算公式如下:

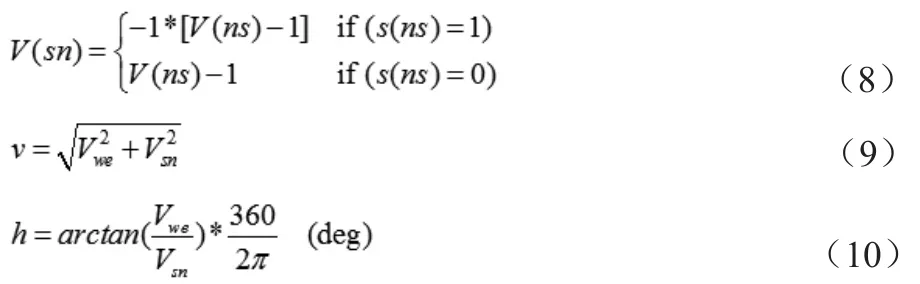
将各域对应数据转换为十进制后可得V-EW=9,S-EW=1,V-NS=160,S-NS=1。带入公式计算得出:
V(we)=-(9-1)=-8
V(sn)=-(160-1)=-159
v=159.20 (kn)
h=182.88 (deg)
即飞行器水平速度159.20节,航向为182.88度。
(2)垂直速度计算。
信息69比特S(Vr)字段为0时,表示飞行器向上飞,为1时表示飞行器向下飞,Vr字段是二进制表示的垂直飞行速率,单位为ft/min,将对应域中数据转为10进制后,可得Vr=14, S-Vr=0,所以可知飞行器以14ft/min的速度上升飞行。
3 结束语
在空管系统大力提倡创新的环境下,本文通过对S模式ADS-B数据空中位置信息和速度信息解码算法进行深入研究并通过实例解读计算程序,从底层来分析ADS-B系统的运行原理。希望能够为广大同行在系统维护与创新的过程中提供一些思路。由于能力有限,不正确之处还请大家批评指正,谢谢。
参考文献
[1]朱芸.模式S应答接收机数字处理系统设计[D].电子科技大学硕士论文,2006.
[2]王菲.基于1090MHzES数据链ADS-B关键技术研究[D].电子科技大学硕士论文,2009.
猜你喜欢
现代商贸工业(2016年5期)2016-12-26
软件导刊(2016年11期)2016-12-22
科技创新导报(2016年21期)2016-12-17
电脑知识与技术(2016年24期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
软件导刊(2016年9期)2016-11-07
考试周刊(2016年44期)2016-06-21
科技视界(2016年14期)2016-06-08
科技视界(2016年9期)2016-04-26