模块化分布式卷扬机集成控制系统研究
2016-04-21 17:16陈慧明吴建强李青姜涛薛埃祥薛胜
筑路机械与施工机械化 2016年4期
陈慧明 吴建强 李青 姜涛 薛埃祥 薛胜伟
摘要:对新开发的一种模块化分布式卷扬机集成控制系统进行了详细的阐述,并通过标准化设计的卷扬机模块,使用上位计算机对分布于施工现场的大吨位牵引卷扬机进行远程集中控制,进而达到对大跨径索结构桥梁的施工工艺进行智能化控制。经云南龙江特大桥施工应用后,证明模块化分布式卷扬机集成控制系统能够提高设备利用率,在大跨径索结构桥梁施工专用设备配置更加合理,对日后大型桥梁专用设备的自主研发进行了技术储备。
关键词:模块化;分布式;卷扬机;集成控制
中图分类号:U445.32 文献标志码:B
Abstract: A newly developed modular distributed control system for windlass was introduced in detail. Host computer was used to conduct the remote control over large-tonnage windlass in construction site by means of the windlass modules with standard design, which realizes the intelligent control of construction of large-span cable bridge. The application to Longjiang Bridge in Yunnan Province shows that the modular distributed control system for windlass improves the equipment utilization and makes the configuration of specialized equipment for cable bridge construction more reasonable.
Key words: modularization; distribution; windlass; integrated control
0 引 言
几十年来,在大型索结构桥梁施工中,卷扬机作为大吨位结构件,在提升、牵引作业中都有着非常广泛的应用。在现代大型悬索桥施工中的猫道架设、主缆架设、山区悬索桥加劲梁架设,以及山区或特殊斜拉桥的加劲梁架设施工中,大多也采用大吨位卷扬机组成的大型、长距离牵引或起重系统来完成。目前,多台卷扬机的协同工作,是通过人工统一指挥的方式来实现的。
如何利用现已成熟的工业自动控制技术和计算机网络技术,开发出一套模块化分布式卷扬机集成控制系统,替代原有的人工操作、指挥,完成对多台卷扬机的集成控制有着实际意义。全面地掌握卷扬机集成控制技术在桥梁建设领域中的应用,可有效降低因人为操作失误的风险,提高施工的安全与可靠性。同时卷扬机集成控制系统还可用于不同的牵引、起重作业,大大提高了设备利用率,降低生产成本,进一步提升施工企业在大型桥梁建设领域的核心竞争力。
1 工作原理
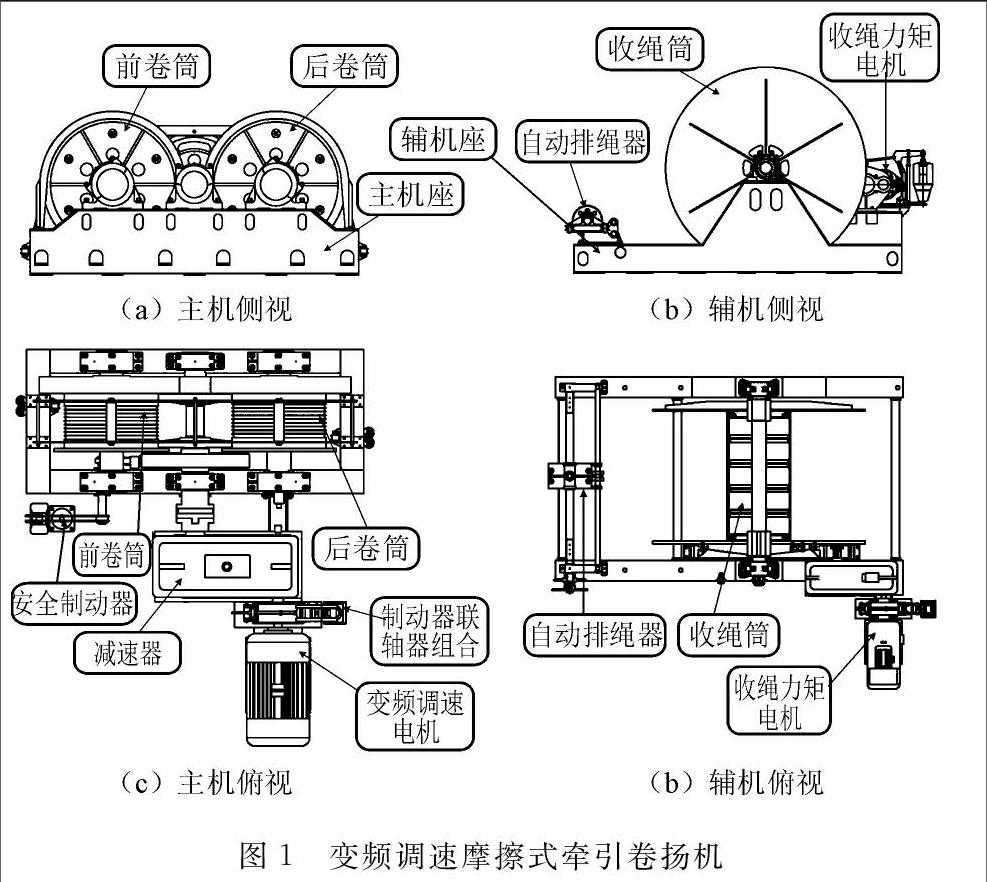
模块化分布式卷扬机集成控制系统的动力模块是由单台变频调速摩擦式牵引卷扬机、变频控制柜、卷扬机控制台和检测卷扬机现场工作状态的各种传感器组成,作为模块化分布式卷扬机集成控制系统的动力设备。卷扬机控制台选用西门子公司的 S7-1200 PLC 作为控制计算机,实现卷扬机控制的全部功能和上位计算机远程控制的全部功能[1-3]。变频调速摩擦式牵引卷扬机,其机械部分的总体结构见图1。
变频调速摩擦式牵引卷扬机的工作原理是通过变频控制器控制摩擦式牵引卷扬机的主电机,经过减速器减速后带动前、后卷绳筒转动,前、后卷绳筒再带动缠绕其上的牵引钢丝绳,实现对构件的牵引。牵引钢丝绳由牵引卷扬机的前端入绳孔引入,为了产生足够的牵引力,牵引钢丝绳必须在前、后卷绳筒上缠绕足够的圈数,再从卷扬机后端出绳孔引出,并进入置于卷扬机后端的储绳辅机储存。
变频调速摩擦式牵引卷扬机具有储绳量大、牵引速度恒定的特点,电脑变频调速,可控性强,非常适用于大型索结构桥梁的施工。
2 控制系统的组成
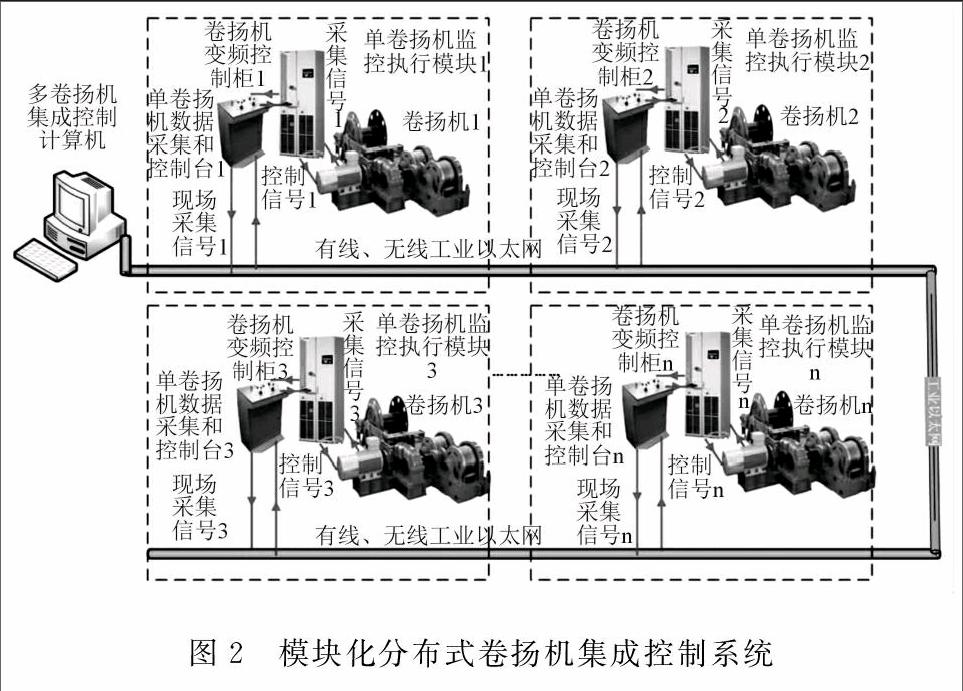
模块化分布式卷扬机集成控制系统见图2。由变频调速摩擦式牵引卷扬机、现场数据采集传感器、变频控制柜(电机驱动)、卷扬机控制台(现场数据采集与控制)和上位集成控制计算机(集成控制软件和硬件),以及将模块连接在一起的有线、无线工业以太网组成。
牵引卷扬机和牵引钢丝绳需要承受被牵引结构件的重量,用户可以根据牵引载荷的大小来配置牵引卷扬机的型号和数量。国内一般常用的牵引卷扬机有18 t、20 t、25 t、40 t、50 t五种规格。
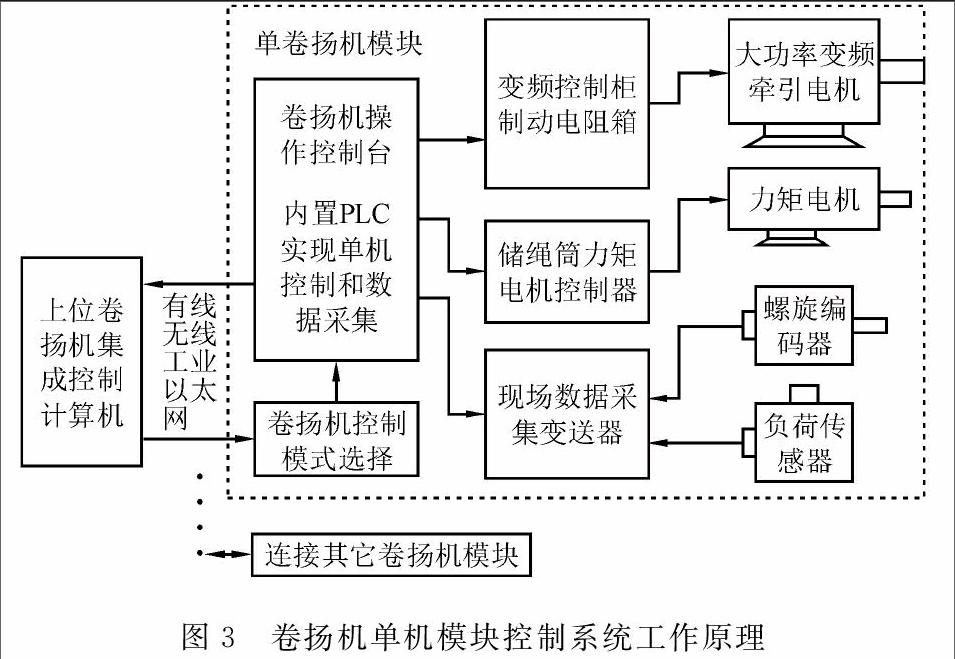
卷扬机控制模块采用标准化设计,通过PLC(可编程控制器)控制,具有2种工作模式,即本机手动控制和远程计算机控制,通过安装在卷扬机控制台上的转换开关进行选择。将开关选择到“本机”模式时,卷扬机将手动完成所具备的操作功能,成为集机械、电子数据采集和控制技术于一体的独立施工设备。将开关选择到“远程”模式时,卷扬机的所有操作将由上位计算机直接控制。但无论选择哪一种控制模式,卷扬机运行状态的数据都将通过工业以太网传送到上位计算机,并在上位计算机显示屏上显示出来。卷扬机数据采集控制模块的工作原理见图3。
卷扬机数据采集与控制系统通过传感器获取卷扬机牵引钢丝绳的速度、出绳长度、内部张力,以及卷扬机电机和制动器运行期间的工作状态的数据信息采集,建立整个牵引系统和被牵引构件的实际状态信息,并经卷扬机控制台中的PLC处理后,在控制台上的显示屏上显示出来。主控计算机根据采集的数据状态确定牵引卷扬机的下一步动作及整个系统的同步调节量。在模块化分布式卷扬机集成控制系统中,采集的传感器信号有牵引钢丝绳的绳速、出绳长度、钢丝绳张力感器测量的钢丝绳张力、状态传感器测量的角度或水平状态,卷扬机驱动电机的运行频率、电压、电流、转矩,变频器的各项运行数据以及制动器运行状态等。
上位计算机主要由计算机主机、高分辨率大屏幕LED显示器及相应的外部设备组成。上位计算机选用安装有Windows 7专业版及其以上版本的工控计算机,上位计算机中安装有西门子TIA Portal V13 RUNTIME版运行软件,带加密锁,并根据应用类型安装相应的控制软件。
上位计算机经工业以太网与各卷扬机模块相连,在西门子TIA Portal V13 软件开发平台上开发的控制系统,采用完全图形化的工作界面,操作简便,易于掌握。同时,系统具有超差报警保护与显示功能,控制软件中设置了钢丝绳张力、位量移超差报警、自动停机等功能可确保牵引过程的安全;系统能实时显示出钢丝绳张力、钢丝绳绳速及构件位置参数,便于操作与监控。
实时远程视频监视系统通过以太网将摄像头、计算机和监视器等设备相连接,对牵引与吊装系统和结构件的状态进行实时监控,使操作人员及时掌握施工现场的情况,避免高空作业,降低了劳动强度,保障了施工安全。
为了确保卷扬机集成控制系统能够可靠运行,将全套控制系统的IP地址设计到一个独立的网段内,并通过路由器中的防火墙与监控系统和项目部局域网隔离,防火墙具有多项安全策略,保证了卷扬机集成控制系统的稳定运行,又可利用VPN技术在公用Internet 网中建立起企业的专用通道,实现整个系统的远程技术支持。技术人员在公司就可与施工现场的设备连接,进行系统故障检测,控制系统软件更新、调试等工作,有效地降低了系统的维护成本,极大地提高了系统维护的响应速度。
4 控制策略
模块化分布式卷扬机集成控制系统要根据牵引或吊装设计方案中设备的布置、被牵引或吊装结构件的要求,建立与之相适应的控制策略,开发适用的控制软件。
在大型桥梁建设中,一套牵引(或吊装)系统往往需配备多台牵引卷扬机,并依据构件牵引工艺要求,要建立多种同步控制策略,常用的同步控制策略有:动作同步控制策略,以实现多台牵引卷扬机同步协调动作;被牵引构件位置同步控制策略,以实现被牵引构件各牵引点的空间位置同步,同时对各牵引点的钢丝绳张力进行监控;载荷分配控制策略,以实现各牵引点的钢丝绳张力分布与理论计算基本一致,同时对各牵引点的空间位置进行监控;位置同步与钢丝绳张力分配相结合的控制策略,根据牵引工艺的实际要求,在整套牵引系统中,对某些点采取位置同步控制策略,对某些点采取钢丝绳张力分配控制策略,使2种控制模式同时存在于系统中,以实现控制目标。
5 工程实例
5.1 工程简介
本研究课题依托云南龙江特大桥施工工程,详细说明模块化分布式卷扬机集成控制系统的实现过程。云南龙江特大桥为双塔单跨钢箱梁悬索桥,位于中国云南保山至缅甸密支那公路保山至腾冲段高速公路K20+254~K22+090处,跨越龙江,为双向四车道高速公路,桥梁设计速度为80 km·h-1,全桥钢箱梁共97段,分A、B、C三种类型,宽度为23.5 m(不含检修道),B、C类各有1段长度分别为8.9 m和7.3 m,其余95段全部为A类,长度为12.4 m,单段钢箱梁重约150 t。
5.2 钢箱梁吊装设备
根据龙江特大桥工程的具体特点,钢箱梁采用以“模块化分布式卷扬机集成控制系统”为核心的缆索吊进行吊装,缆索吊设计额定起吊重量为170 t(含吊具10 t),主索跨径组合为310 m+1 196 m+310 m,利用两岸索塔作为缆索吊塔架,索鞍布置于索塔上横梁顶面,主索分别锚固于两岸主桥锚碇的散索鞍支墩上。缆索吊机总体布置见图4。
由2台分布于左、右幅的25 T卷扬机组成缆索吊起重系统卷扬机(编号为5、6号,5号机设置在下游侧,6号机设置在上游侧);4台30T牵引卷扬机(编号1~4号,1号机、2号机为一对设置在上游侧,3号机、4号机为一对设置在下游侧),主控制室部署在6号机的控制室中。
为了保证“模块化分布式卷扬机集成控制系统”的主要操作人员能实时掌握吊装现场设备的运行状态,在主控室中配备了一套具有4个视频监控点的实时监控系统。通过实时监控点的画面,主控人员可以掌握当前吊装梁段的实际状况及各卷扬机的现场状态,再通过主控计算机对卷扬机和被吊梁段运行状态数据进行监控,确保系统控制准确可靠,安全运行。 “模块化分布式卷扬机集成控制系统”主控制界面,如图5所示。
5.3 钢箱梁吊装缆索吊的控制系统
钢箱梁吊装的缆索吊集成控制系统是由6台具备远程控制功能的卷扬机模块、1台配有“卷扬机集成控制软件”的上位计算机和1台43 in.具备4 K分辨率的LCD显示器,通过6块西门子S7系列的工业以太网交换机模块、一对工作于5 GHz频段的无线网桥和1台独立的以太网交换机组成的网络通讯系统。
在本系统中,每个卷扬机模块都是既可独立操作,又可通过上位计算机远程集中控制。在集中控制模式时,1~4号卷扬机控制缆索吊运梁跑车沿主桥轴线方向的水平移动,5~6号卷扬机控制钢箱梁的提升与下放,6台卷扬机在通过上位计算机远程集中控制模式下,可实现下述功能。
(1)通过计算机控制每台卷扬机单独运行,常用于正式同步运行前的跑车、吊具位置和状态的调整;同步吊装不停机状态下,单机调整与控制。
(2)通过计算机分别控制上、下游跑车的每对卷扬机同步运行,通常用于上、下游同步运行前的位置调整和吊装过程中,上、下游同步出现误差时的单边调整与控制。
(3)上、下游4台牵引卷扬机启动时的同步运行控制包括4台同时启动、停止、前进、后退、加速、减速、点动进、点动退等各种同步运行控制。
(4)上、下游2台提升卷扬机同步启动、停止、提升、下放、加速、减速、点动升、点动降等同步运行控制。
(5)在任何时间、任何运行状态下,可不停机单独调整与控制任1台卷扬机模块的运行状态。
(6)在同步吊装运行过程前和同步吊装运行过程中,可根据施工工况选择自动控制模式,即恒力矩同步控制模式或等出绳长度同步控制模式,以便精确控制卷扬机按照预先设定的控制要求进行钢箱梁吊装作业,实现对整个吊装过程中的自动运行控制,进一步提高钢箱梁吊装施工的效率。
(7)设备运行状态显示在图形化控制界面中,下半部分以图形和数据的方式,显示出每个卷扬机模块完整的实时运行状态。用仿真模式动态显示出缆索吊2个平移跑车分别距2个主塔中心线之间的距离、钢箱梁与跑车上挂架之间的距离等数据。使操作人员对缆索吊的运行状态一目了然,对吊装中的钢箱梁所处的位置心中有数,真正做到对全套缆索吊装系统的吊装过程安全有效地监控,也大大提高了施工效率。
(8)极限控制和故障报警。为确保系统安全,程序中对设备运行的极限位置都采取了限位控制和极限停机。在同步运行的过程中,只要检测到任1台设备因故障出现停机,就会立即停止整个系统运行;对暂时不会危及安全的故障,通过屏幕上闪烁指示灯的方式进行报警,提示操作人员及时处理或采取相应的控制操作或主动停机。每台卷扬机出现通讯故障、电机过载、力矩超载等现像,系统都会报警;超过极限值会立即停机。
5.4 龙江大桥钢箱梁吊装
为全面测试“模块化分布式卷扬机集成控制系统”在系统设计中提出的各项目标,钢箱梁吊装于2015年7月30日开始,采用统一指挥,单台卷扬机人工操作,分别控制6台卷扬机进行施工;并于2015年9月6日开始,应用卷扬机集成控制系统吊装龙江大桥第47(B23)段钢箱梁,至2015年10月30日全桥吊装合龙,总共用时92 d,圆满完成之江大桥钢箱梁吊装工作。
6 控制系统的优点
模块化分布式计算实时控制系统相比传统的集中控制系统,具有如下优点。
(1)将组态控制技术应用于建筑工程领域具有完全图形化操控界面,操作形象直观,易于掌握。
(2)系统采用模块化设计,可根据不同牵引设计方案灵活搭建,可扩展性好,设备利用率高,可广范适用于各种不同规模的牵引、提升、下放等牵引系统中。
(3)牵引点分布区域广,控制距离远,通过工业以太网与控制点距离可达5 km以上。
(4)控制点多,最多可达16台;控制精度高(取决于传感器的精度)。
(5)测试手段先进,可配备各种绝值旋转编码器、相对型旋转编码器感器、张力检测压力传感器、载荷传感器等。
(6)控制模式多,位移同步控制、钢丝绳恒张力控制及位移荷载混合控制等控制模式。
(7)安全、可靠性高,具备完善的应急报警及保护措施和较强的纠错能力。
(8)采用VPN技术在公用Internet 网中建立起企业的专用通道,实现远程技术支持,完成系统故障检测、软件更新及调试,有效地降低了系统的维护成本。
7 结 语
模块化分布式卷扬机集成控制系统的研究成功,实现了国内桥梁缆索吊装作业的智能化控制和远程技术支持;模块化设计可根据不同的工序要求,灵活搭建提升或牵引系统,提高了设备的利用率,使在大跨径索结构桥梁施工专用设备方面配套更加齐备合理,也对今后其他类型大型桥梁专用设备的自主开发做了技术储备。模块化分布卷扬机集成控制系统的成功必将促进国内桥梁建设关键设备的国产化发展。 同时,作为中国企业自主创新技术,大大增强了企业在国际市场中的核心竞争能力。
参考文献:
[1] 钟 克,许可诚.基于模糊PID算法的JM12.5卷扬机控制系统的设计[J].煤矿机械,2014,35(3):121-123.
[2] 穆光亚.沥青搅拌站成品料仓卷扬机控制系统[J].筑路机械与施工机械化,2008,25(5):35-37.
[3] 袁 泉.浅析PLC在起重机械中的同步应用[J].科技创业月刊,2013(6):176-177.
[责任编辑:高 甜]
猜你喜欢
海洋信息技术与应用(2022年1期)2022-06-05
装备制造技术(2021年2期)2021-07-21
现代装饰(2020年5期)2020-05-30
制导与引信(2017年3期)2017-11-02
中国核电(2017年2期)2017-08-11
流程工业(2017年4期)2017-06-21
流程工业(2017年4期)2017-06-21
自动化博览(2014年12期)2014-02-28
汽车电器(2014年5期)2014-02-28