利用时间谱信息融合的空中目标分类算法*
2016-04-26 11:06姜礼平
火力与指挥控制 2016年3期
关键词:目标识别
刘 杨,姜礼平,管 正
(海军工程大学,武汉 430033)
利用时间谱信息融合的空中目标分类算法*
刘杨,姜礼平,管正
(海军工程大学,武汉430033)
摘要:时间谱信息(目标的航迹、速度、机动性、空间坐标信息)揭示了目标空间状态随时间的变化特性,从而可利用目标的时谱简化(或缩小)待识别目标的范围。将低分辨雷达测量得到的高度、速度、加速度作为目标特征,建立典型空中目标对各特征的模糊隶属函数,进而采用改进的证据推理进行分类判决。结果表明利用时间谱信息可为雷达空中目标识别提供有效辅助手段。
关键词:目标识别,时间谱信息,证据理论,低分辨雷达
0 引言
雷达目标识别是根据目标的后向电磁散射来鉴别目标,当雷达带宽足够宽时,目标后向电磁散射包含了目标的形状、大小、结构等细节信息,以此为基础形成了一些有效的目标识别方法[1-2]。但现役雷达一般不具备径向上和横向上的高分辨,雷达所揭示的目标信息非常有限,因此,低分辨雷达的目标识别研究仍受到各国的充分重视和关注[3-7]。
文献[7-8]指出利用低分辨雷达提供的时间谱信息进行目标粗分类是可行的。如直升机的悬停、反舰导弹的蛇形机动、飞机的高速俯冲及跃升,都一定程度上揭示了目标随时间的运动变化特性。因此,可利用时间谱信息,简化(或缩小)待识别目标的范围,为高分辨雷达目标识别研究打下良好基础。文献[8]采用模糊逻辑方法利用时间谱信息对5种目标进行识别;文献[9]利用运动状态和敌我识别信息对空中目标进行了分类,但需要提前获取各个运动参数的先验概率分布。文献[10-11]利用位置和运动信息对海空目标进行了识别,但文中建立的隶属函数存在谬误;此外,上述文献中出现的识别方法均只对当前时刻的信息进行了处理,没有利用时间上的累积信息。
本文利用目标的位置、速度、加速度等参数对反舰导弹、直升机、战斗机进行分类判决。首先分析不同目标的运动特性,建立各运动参数的模糊隶属函数。根据目标模糊隶属度对目标属于各类的基本概率进行指派。由不同运动参数产生的概率分配可能会存在冲突,运用传统的DS合成规则会得到有悖常理、违反直观的结论,因而本文采用基于支持度的改进证据合成方法[16],在不同参数和时间两个维度上对概率分配函数进行合成,得到多信源和多帧的融合置信函数,经决策判决后获取识别结果。
1目标运动特征分析与提取
低分辨雷达测量可供利用的目标时间谱信息有:目标的位置、速度、加速度。但目标的运动状态在不同时间、不同任务下是大不相同的,运动参数和目标类型间的对应关系是不确定的,模糊的,很难用具体的函数形式精确描述运动参数的概率分布。因此,本小节通过分析各目标运动特点,确定各运动参数的模糊隶属函数,着重反映运动状态从隶属于目标到不属于目标的变化特性。各目标类型的隶属度数值变化特性则用简单的梯形与半梯形分布来描述。
1.1目标高度特征分析
战斗机飞行高度从几百米到上万米,可以看作低空目标也可以看作高空目标。直升机也在几百米到数千米的范围内变化。而反舰导弹为有效突防,一般采用低空或掠海飞行弹道,高度在数十米左右。因此,高度信息可较为准确区分反舰导弹和飞机目标。
建立模糊隶属函数如图1所示。
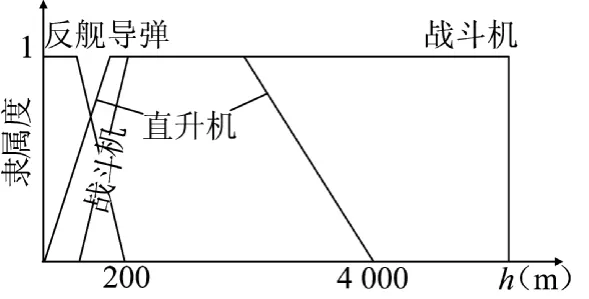
图1 基于高度的模糊隶属函数
1.2目标速度特征分析
反舰导弹目标属于高速目标,速度在数百米/s;一般战斗机的最大平飞速度可达2 MHz~3 MHz,巡航速度一般在0.5 MHz~1 MHz,最小平飞速度一般在0.2 MHz~0.25 MHz,高速范围内与反舰导弹的飞行速度范围有所重合,低速范围内与直升机的速度范围有所重合;直升机属于低速目标,速度一般在100 m/s以下,甚至可以实现悬停飞行,因此,当目标具有一定高度且飞行速度为0时,可以以很高的置信度判断为直升机。
建立模糊隶属函数如图2所示。
1.3目标加速度特征分析
反舰导弹在跃升俯冲时加速度较大,有高达10左右的过载系数,可以作为识别反舰导弹的主要特征。但反舰导弹一般只在末端自导段才进行跃升俯冲,巡航段的加速特征体现不明显。战斗机的加速能力则远大于直升机的加速能力,F22据称可达到0.8 g的飞行加速能力。
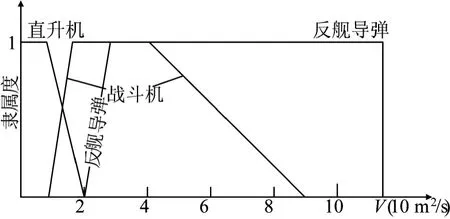
图2 基于速度的模糊隶属函数
建立模糊隶属函数如图3所示。
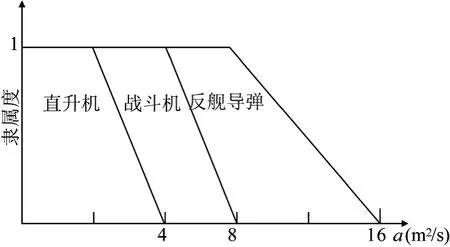
图3 基于加速度的模糊隶属函数
2基于改进证据合成方法的融合识别
Dempster证据合成方法是一种较好的不确定性推理方法,适用于多源信息融合。但当参与证据组合的证据体之间存在较大冲突时,Dempster组合规则常常会得出“一票否决”等有悖直观的结论,抗干扰能力不强。本文采用基于支持度的改进证据合成方法,避免Dempster合成方法中的“一票否决”问题,同时保留了Dempster组合方法满足交换律、结合律的良好特性。
2.1基于支持度的改进证据合成方法
设融合系统的辨识框架Θ包含w个完备的互不相容的假设命题(A1,A2,A3,…,Aw),n个证据e1,e2,…,en的基本可信度分配函数(BPA函数)分别为m1,m2,…,mn,按照以下步骤进行证据合成:
①检验证据之间是否存在冲突。对证据ei、ej,其对应的BPA函数为mi、mj,设Ap、Aq满足mi(Ap)=如果Ap、Aq对应着同一个识别结果,则认为不存在证据冲突;否则,将mi、mj看作两个向量,考查它们之间的相似性系数:

设置阀值p,如果δ(mi,mj)≤p,则认为证据ei、ej相互冲突。两两检验BPA函数m1,m2,…,mn,发现存在相互冲突的证据,转②;如果检验完毕,没有发现证据冲突,则转⑥;
②检验证据总数n。如果n=2,转③;如果n>2,则转④;
③采用加性策略对BPA函数m1,m2进行处理,转⑥;
④计算证据ei与ej之间的距离

并计算证据ei与ej之间的支持度

⑤构造证据e1,e2,…,en的支持矩阵

支持矩阵R是非负对称矩阵,由Perron-Frobenius定理可知,R存在正的最大特征值,使得该特征值对应的特征向量V=(v1,v2,…,vn)为非负的(vk≥0,k=1,2,…,n),满足


这里β(k)反映了证据ek在e1,e2,…,en之中的支持度程度。利用支持度系数对BPA函数m1,m2,…,mn进行如下转化:

⑥采用Dempster方法对证据e1,e2,…,en进行合成,得到最终的合成结果m'。
⑦对合成经过进行判别。设ε为检验门限值,分别取合成结果m'中的最大值m'(Ap)和次最大值m'(Aq),如果m'(Ap)-m'(Aq)>ε,则Ap为判决结果;否则,认为识别结果不明确。
2.2融合识别方法
设识别框架Θ={反舰导弹(A1),直升机(A2),战斗机(A3)},由低分辨雷达能获取目标的运动参数∏={高度(X1),速度(X2),加速度(X3)},基于证据合成的融合方法如下:
①计算k时刻基于不同运动参数的各类型隶属度。k时刻,探测到目标,并获取目标的4个运动参数,得到运动参数估计值Xk=[X1kX2kX3k],利用第2节确定的基于各运动参数的模糊隶属函数,计算不同运动参数下目标属于各类的隶属矩阵:
其中ukij(1≤i≤3,1≤j≤3)表示k时刻运动参数Xik确定的Aj类型的隶属度。
②计算k时刻基于不同运动参数的BPA函数。将k时刻由运动参数确定的各类型隶属度进行归一化,转化为k时刻基于不同运动参数的BPA函数:

③计算k时刻的BPA函数。对k时刻不同运动参数的BPA函数,采用改进的证据合成方法进行融合,得到k时刻的BPA函数mk。
④量测更新。经滤波后获取k+1时刻的运动参数估计值Xk+1=[X1k+1X2k+1X3k+1]'及估计误差协方差矩阵Sk。比较Xk+1与Xk,如果说明目标未进行机动,k+1时刻的BPA函数mk+1不更新;如果说明目标发生机动,则重复步骤②、③,得到k+1时刻的BPA函数mk+1。其中c为设定的系数。
⑤采用改进的证据合成方法,对mk+1和mk进行融合,得到最终识别结果。
3仿真分析
根据文献[17]中各目标的典型运动模式(匀速直线运动、匀加速直线运动、转弯运动、比例导引运动、跃升俯冲运动)设计多种不同的运动情境。由舰载3D雷达对目标进行观测,采用交互式多模型跟踪算法进行滤波,提供目标的高度,速度、加速度信息。其中反舰导弹运动模型中包括匀速直线运动、比例导引运动和跃升俯冲运动,直升机、战斗机以匀速直线运动、匀加速运动、协同转弯运动为主。
实验中3种目标典型航迹如图4~下页图6所示。
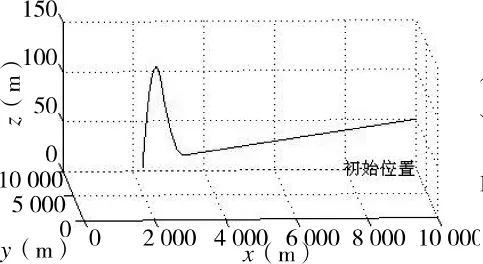
图4 反舰导弹航迹
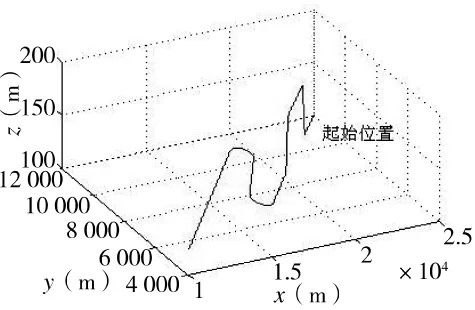
图5 直升机航迹
以图7中持续100帧的战斗机航迹识别过程为例。战斗机1帧~40帧进行爬升运动在水平面内加速,爬升至15帧时,爬升速度逐渐减小并在最高点开始加速俯冲至40帧。40帧~90帧为匀速转弯运动,90帧~100帧为匀速直线运动。3种目标类型的识别置信概率如图7所示。
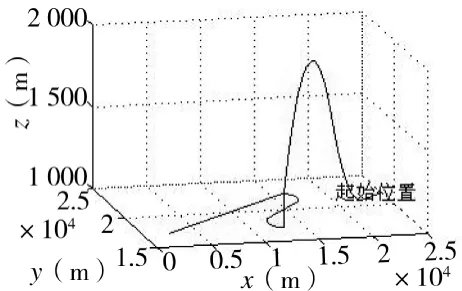
图6 战斗机航迹
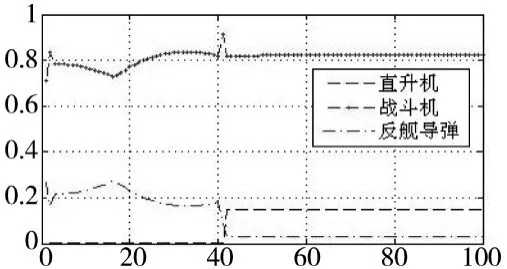
图7 航迹识别结果
由图7可知,在航迹初始阶段至15帧,战斗机向上爬升,高度不断增大,因此,战斗机的置信概率略微增加。随后由于速度不断增大,反舰导弹的置信概率有所增加,战斗机的置信概率有所减小。之后战斗机速度开始下降,从而反舰导弹的置信概率有所下降,战斗机的置信概率有所增加。战斗机爬升至最高点并转入俯冲后,速度逐渐增加,故反舰导弹的置信概率有所增加,战斗机的置信概率有所下降。在第40帧时,战斗机结束各方向的加速过程,转入匀速运动,因此,反舰导弹的置信概率有下降的突变,战斗机和直升机的置信概率急剧增大。随后战斗机转入匀速过程,战斗机的置信概率又急剧下降至0.81,直升机的置信概率则维持在0.16。
由上述分析可见,目标类型置信概率的变化正确反映了目标的机动过程,有效地对目标机动过程进行了跟踪。实验中对每种目标设计了200种不同的运动情境,其中反舰导弹的识别正确率为98 %,对直升机目标的识别正确率为95 %,对战斗机的识别正确率为97 %。
4 结论
本文在分析空中目标运动特征的基础上,建立了不同目标基于运动特征的模糊隶属函数。应用基于支持度的改进证据合成方法,在参数和时间两个维度上对直升机、反舰导弹和战斗机进行了融合分类。仿真实验结果表明,文中提出的识别方法可以对空中目标进行粗分类。需要指出的是,利用时间谱信息的识别精细化程度不高。针对具体任务中的识别目标,建立更为准确的隶属函数,可提高算法的分类性能,为实现目标精细化识别打下基础。
参考文献:
[1]CAROMICOLI A,KURIENT.Multi target identification in airborne surveillance[J].SPIE,Aerospace Pattern Recognition,1989,1098:161-176.
[2]TETTI J G,GORMAN R P,BERGER W A.A multi feature decision space approach to radar target identification[J].IEEE Transac tions on Aerospace and Electronic Systems,1996,32(1):480-48.
[3]张汉华,王伟,李国顺.一种低分辨雷达自动目标识别系统[J].现代雷达,2003,12(25):11-13.
[4]LEUNGH,WU J.Bayesian and dempster-shafer target identification for radar surveillance[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(2):432-447.
[5]RISTIC B,GORDAN N,BESSEL A.On target classification using kinematic data[J].Information Fusion,2004(5):15-21.
[6]ANGELOVA D,MIHAYLOVA L.Sequential monte carlo algorithms for joint target tracking and classification using kinematic radar information[C]//Proceedings of the 7th international conference on information fusion,2004.
[7]王伟,张汉华,姜卫东,等.低分辨雷达的目标特征提取方法[J].国防科技大学学报,2002,24(2):15-21.
[8]张汉华,王伟,姜卫东,等.基于时间谱信息的低分辨雷达飞机目标分类[J].系统工程与电子技术,2004,26(4):488-490.
[9]王壮,郁文贤,庄钊文,等.基于运动状态和敌我属性的空中目标融合识别[J].国防科技大学学报,2001,23(2):15-20.
[10]何翼,刘严岩,刘华军.基于运动特征的分层模糊目标识别[J].现代雷达,2010,32(9):44-47.
[11]王晓博,王国宏,阎红星.利用位置和运动信息的目标识别[J].电光与控制,2008,15(10):5-9.
[12]SHAFER G.A mathematical theory of evidence[M].Princeton,NJ:Princeton University Press,1976.
[13]LEFEVRE E,COLOT O,VANNORENBERGHE P,et al.A Generic frame work for resolving the conflict in the combination of belief structures[C]// Proc.of the 3rd international conference on information fusion,2000.
[14]JOUSSELEM A,GRENIER D,BOSSE E.A new distance between two bodies of evidence[J].Information Fusion,2001,2(2):91-101.
[15]DENG Y,SHI W K,ZHU Z F,et al.Combining belief functions based on distance of evidence[J].Decision Support Systems,2004,38(3):489-493.
[16]姜礼平,刘杨,胡伟文,等.基于支持度的改进证据合成方法[J].系统工程与电子技术,2014,36(8):1483-1487.
[17]石章松,刘忠,王航宇,等.目标跟踪与数据融合理论及方法[M].北京:国防工业出版社,2010.
Aircraft Target Classification Based on Fusion of Registration Information
LIU Yang,JIANG Li-ping,GUAN Zheng
(Naval University of Engineering,Wuhan 430033,China)
Abstract:The motion state characteristic of the aircraft targets can be partially revealed by registration information(track,velocity,maneuverability).So it is possible to use registration information to simplify(or reduce)the range of the target recognition.Registration information is used in this paper to classify three kinds of aircraft targets by evidence theory.The simulation results show that it is practical for rough classification.
Key words:target recognition,registration information,evidence theory,low resolution radar
作者简介:刘杨(1987-),男,山东淄博人,博士研究生。研究方向:目标跟踪与信息融合。
*基金项目:国家自然科学基金资助项目(6107419)
收稿日期:2015-03-08修回日期:2015-05-05
文章编号:1002-0640(2016)03-0008-04
中图分类号:TN957.51
文献标识码:A
猜你喜欢
数字技术与应用(2016年10期)2017-04-01
科技创新与应用(2017年6期)2017-03-23
中国新通信(2017年3期)2017-03-11
中国水运(2017年1期)2017-02-27
中国水运(2016年11期)2017-01-04
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
科学与财富(2016年28期)2016-10-14
现代电子技术(2014年22期)2014-11-14