
智能型果园多功能管理机的设计与田间试验
2016-05-03 07:37张亚刘继展詹国祥唐善奇陈绍平冯
江苏农业科学 2016年3期
张亚+刘继展+詹国祥+唐善奇+陈绍平+冯上海+何增富+王芹


摘要: 针对现有果园管理机械功能单一、集成化和智能化水平较低的问题,根据果园规格和作业要求开发了一种智能型果园多功能管理机,采用履带式无极变速底盘,装配单圆盘式开沟器、外槽轮式施肥装置和新型双摆弥雾系统,以实现果园的开沟、施肥、施药多环节高效机械作业。设计了智能监控系统,实现开沟、施肥、施药各功能启/停的自动化和快速一键切换,同时实现果园复杂工况下的开沟负荷反馈控制以及油量、药量的准确监测预警,保证多功能管理机作业的可靠性及便捷操作性。田间试验表明,管理机可实现50、40 cm宽深开沟,施肥与施药速度分别可达360 m/h和7.2 km/h,同时满足了矮化密植模式下的行间作业要求,为实现果园的多环节高效机械作业提供了新型多功能一体装备。
关键词: 果园;智能;多功能管理机;设计;田间试验;开沟;施肥;施药
中图分类号: S224 文献标志码: A 文章编号:1002-1302(2016)03-0434-05
我国是世界最大的水果生产国,随着农业产业结构的调整,林果种植面积不断扩大,果园管理机械化的重要性日益显著[1]。但是,我国目前果园管理机械化程度仍然较低,主要问题体现在:首先,我国果园以矮化密植为主,果园规模小且缺乏规范性,造成国外的先进大型机械难以应用[2-4];其次,目前国内现有的果园管理机械中多以手扶式中耕管理机械、手持式和背负式施药机械等微小型机为主,作业效率低且操作强度大,且大多作业功能单一而利用效率极低[5]。因此,开发适应我国果园生产作业要求的高效多功能管理机械已成为现实紧迫需求。
部分现有果园机械可实现一机多用,如可以实现松土、培土、起垄、旋耕等多功能的1YG系列果园微耕机等,主要用于土地整理,无法满足各类果园排水、埋施有机肥所需的宽深开沟要求,更不具备施药、施肥等功能;而市场现有的TG系列、DWG系列等果园多功能管理机,通过底盘附加不同机具实现剪枝、喷药、施肥、采摘、运输等功能,其底盘主要起各类机具的携带与运输作用,需由人工完成机具更换与操作,整机集成度低,操作复杂,劳动强度大而作业效率受到影响[6-7]。
本研究针对果园管理中宽深开沟、施肥、施药等劳动强度大的关键环节,根据果园规格和作业要求进行多功能高度集成与智能化的管理机设计,从而为实现果园多环节高效机械作业提供新型多功能一体装备。
1 设计要求
1.1 设计依据
1.1.1 果园规格 目前我国果园多采用低矮密植型种植模式,根据2013年11月江苏省句容市象山镇龙山果园基地的调研可知,果树行距和株距均为3~4 m,树高2~2.5 m,冠层较厚,两行果树枝叶几乎交接,造成果园密闭。
1.1.2 作业参数 (1)开沟尺寸。管理机主要作业于成龄果园,在果树行间行进开沟,完成沟内施肥,根据农艺要求,开沟宽度达到40~50 cm,深度达到40 cm[8]。现有果园开沟机的开沟尺寸一般为宽度20~35 cm,深度10~30 cm,无法满足果园作业需要,一些机型较大的机械开沟尺寸能达到要求,但不能满足其种植空间环境特殊性。(2)肥量。经过江苏省句容市象山镇龙山果园基地等落叶果树(苹果、葡萄等)果园调研可得,基肥秋季8月下旬至9月上中旬施入,以农家肥为主,混加少量的氮素化肥,同时每年追肥1~3次,分别以氮肥、磷钾肥、钾肥为主。综合各个时期施肥方式,估算果园施肥量为1 500~6 000 kg/hm2。(3)药量。调研可知,果园采用机动高压喷雾器,一般在果树的生长季节,正常情况下,果园的施药液量在2 250 kg/hm2左右,全年用药7~9次。
1.2 设计要求
1.2.1 整机结构 通常开沟机、施肥机与施药机均由发动机在驱动车身行走的同时,通过后轴输出为作业装置提供动力。开沟施肥机则通过开沟器地轮来带动排肥器实现同步开沟施肥作业。对于该果园多功能管理机,需要实现50 cm×40 cm宽深开沟的同时,完成果园开沟、施肥与施药的多功能作业,无法通过现有装备的简单组合来实现,而必须在考虑整机动力与传动方案的同时,满足宽深开沟的大动力与多功能模块的车身布局需要,从而有效控制车身尺寸以保证行间狭小冠层封闭空间的通过性。
1.2.2 监测控制 与单一作业机具不同,一定的自动化水平是满足多功能作业的客观需要。首先,果农在驾驶作业过程中,实现复杂的功能启停和切换,操纵困难且容易产生误操作;其次,果农难以实现对复杂果园土壤条件下宽深开沟作业的载荷波动、积累、突变和药量、油量变化的实时发现与处理,从而导致意外停机和机器损伤,严重影响多功能管理机的作业可靠性与效率。因此,实现油量、药量和开沟负荷的监控与响应,以及多功能的快速简单切换,是提高多功能管理机性能及操作性的保证。
2 机械结构设计
2.1 作业部件设计
2.1.1 开沟器 为提高生产率,开沟装置采用单圆盘式并实行一次成型作业。开沟装置主要由悬挂架组合、中间齿轮箱总成、刀轴组合等组成(图1)。
如图1,开沟器下刀深度受到圆盘尺寸、开沟旋切刀尺寸、侧边齿轮箱尺寸和三点悬挂系统共同限制:
式中:R为单圆盘开沟器刀刃回转半径,cm;R1为圆盘半径,cm;L为旋切刀轴向伸出长度,cm;h2为开沟刀盘轴心最低下刀离地高度,受侧边齿轮箱壳体宽度的限制,h2≥10 cm;h为开沟深度,据设计要求,h≥40 cm;h2′为开沟刀盘轴心最低抬升离地高度,cm;h1为刀刃的安全抬升离地高度,20 cm;R2为刀盘轴心与悬挂摆动支点距离,cm;θ为开沟刀盘抬升的摆动角度,rad,同时受液压悬挂三点系统参数、底盘后输出轴与开沟器输入轴间许可传动角度的限制。
为实现40 cm的开沟深度要求,根据式(1)分析计算,最终设计圆盘半径R1=38 cm,并选择国标IT245型旋耕弯刀作为开沟刀片,刀辊回转半径为245 cm。刀盘两侧各安装5把刀,两侧旋切刀按旋向相反的两锥状螺旋线排列,间隔错开,整个宽度方向依次切削,以保证开沟宽度和沟型要求。
2.1.2 施肥装置 排肥器性能的好坏直接影响到排肥装置的工作质量。综合考虑排肥均匀性和排肥量,选择外槽轮式排肥器(图2-a)。施肥装置设计的重点是参数的优化。沟内施肥时排肥器所需排肥量为[9]:
(2)
式中:[q]为沟内施肥所需排肥量,kg/min;Q为单位面积果园的施肥量,kg/m2;v为底盘的行进速度,m/s;x为果树的行距,m,调研得到的果树行距约为4 m;z为排肥器个数,个,z=1。
据式(2)求得沟内施肥时排肥器所需排肥量为 20~60 kg/min。
而外槽轮式排肥器的排肥量为[10]:
式中:q为排肥器的排肥量,kg/min;D为外槽轮的直径,cm;L为槽轮的有效工作长度,cm;γ为肥料密度,常用复合肥密度范围是0.840~1.01 g/cm3;α为槽内化肥充满系数,取0.7;n为排肥器的转速,r/min;f为每个凹槽的端面积,cm2;t为槽轮凹槽的节距,cm;λ为带动层厚度,与排肥轴转速有关,取 0.05 cm。其中凹槽端面积f和节距t由凹槽个数、深度及槽轮直径D所决定。
由式(2)(3)知,沟内施肥量是否得到满足,取决于外槽轮式排肥器的结构参数、排肥器转速和底盘行进速度的共同限制。
根据设计参数:开沟施肥200 m/h、单施肥速度360 m/h和开沟宽度与肥料流动性等实际因素,由式(2)(3)进行规划求解并取整,设计结果为:转速n=60 r/min,槽轮有效工作长度L=30 cm,槽轮直径D=18 cm,凹槽个数与深度分别为5个和2.5 cm。
排肥装置由直流减速电动机驱动,结构总成如图2-b所示。
2.1.3 施药系统 由于多功能管理机的后轴动力与后部空间为开沟器所占用,目前果园机械施药的主要装备侧向风送喷雾机所需的巨大动力和传动方式、以及喷雾机与药箱所需占据的庞大空间(功耗达数十千瓦,重量达200~800 kg)均无法适应多功能管理机的需要。因此提出并开发了双摆弥雾式施药装置(图3),以受到果农广泛欢迎的手持式小型轴流弥雾机为基础,由平面双曲柄-空间摆杆机构模拟果农对喷管的摇动,以弥补其喷幅偏小的不足,来实现药液对双侧果树冠层的均匀喷施覆盖。该装置中由0.09 kW直流减速电动机带动双弥雾机喷管的摇动,并由轴流发动机完成弥雾喷施,而无需底盘动力的传动输入,其功耗、重量和药液耗量均仅为侧向风送果园喷雾机的1/5~1/20,从而有效解决了各功能模块一体布置的空间与传动协调问题[11]。
2.2 底盘设计
2.2.1 整机动力与传动结构 (1)50 cm×40 cm宽深开沟的底盘与开沟器载荷远远大于施肥与施药作业,同时宽深开沟的作业速度较低,由地轮驱动无法满足均匀施肥和较大施肥量的需要,且果园生产中存在开沟后填入秸秆进而施加无机肥的间隔作业需要。因此,由主发动机驱动底盘行进与开沟作业,而施肥与施药装置则分别由电动机独立驱动,从而大大简化传动系统复杂性,并实现各功能的独立作业性和保证施肥量。(2)为提高在复杂果园土壤条件下的着地力并适应其载荷变化,进而为开沟载荷复杂变化的自动响应提供可控性,采用了履带式底盘,横置主发动机分别经HST液压无级变速系统和变速箱传递给底盘的驱动轮轴、经换向器与万向节后轴输出至开沟器主轴,带动底盘行走与开沟作业。
2.2.2 开沟功率估算 单圆盘开沟装置所需驱动功率为[12]:
式中:P1为开沟机所需驱动功率,kW;KN为综合比阻,KN=KgK1K2K3K4,Kg为土壤坚实度,K1为耕深修正系数,K2为土壤含水率修正系数,K3为植被修正系数,K4为作业方式修正系数,据试验实测数据及农业机械设计手册[13],Kg=25.5~35.7 N/cm2,K1=1.0,K2=0.92,K3=1.1,K4=0.66,可得KN=175~246 N/cm2;a为沟槽上口宽度,设计要求a≥50 cm;b为沟槽下底宽度,设计要求b≥38 cm;v为开沟作业速度,设计宽深开沟速度v≥200 m/h;η1为发动机到开沟轴的传动效率,根据发动机至开沟轴传动路线中各级传动效率[14]计算得到传动总效率η1=0.81。
由式(4)计算得到开沟装置所需的驱动功率约为 21~29 kW。
2.2.3 行走功率估算 履带行走装置所需驱动功率由下式得到:
式中:P2为行走装置所需驱动功率,kW;F为最大牵引力,N;v2为空载前进速度,根据设计要求v2≥0.5 m/s;η2为履带行走装置效率,η2=0.8~0.85;η3为发动机到驱动轮传动机构的效率,根据发动机至驱动轮传动路线中各级传动方式的效率[14]计算得η3=0.7。其中最大牵引力由整机重力进行估算[15]:
由式(5)、式(6)计算得到履带行走装置所需的驱动功率约为13~16 kW。
2.2.4 整机布局与底盘结构 根据整机功率需要,选择额定功率52 kW、额定转速为2700 r/min的常柴4L88型发动机为主动力。管理机结构如图4所示,为缩短机身长度和简化传动,将发动机横置于机身前侧,换向器安装在座椅后方并将动力传递至液压悬挂系统,液压悬挂系统的输出轴通过万向节与开沟器输入轴联接;施药装置沿行进方向安装于液压悬挂系统一侧,从而尽可能缩短机身长度,减小转弯半径。
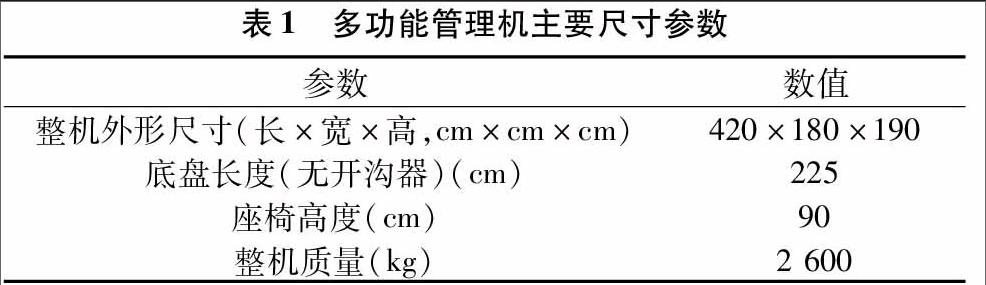
通过行进、开沟载荷测算和机身的布局优化,果园多功能管理机的机身高度和宽度分别控制在190 cm和180 cm,从而满足了果园行间通过性的要求。未悬挂开沟器的机身长度亦控制在225 cm,但由于单元盘开沟器对悬挂及下刀空间尺寸的需要,整机长度仍达到了420 cm。
3 智能监控系统设计
3.1 设计目标
(1)实现开沟、施肥、施药各功能启/停的快速一键启停切换,有效简化操控流程和降低操控难度;
(2)实现复杂果园地形与作业状态下的真实油量和药量准确监测,并及时进行预警和报警;
(3)实现对复杂果园土壤条件下开沟作业载荷的波动、
积累与突变等不同变化规律的分级自动响应。
3.2 硬件设计
根据多功能果园管理机的智能监控目标与简便操作的实际需求,采用触摸屏式监控结构,如图5所示。
3.2.1 负荷反馈调控子系统 为简化转矩测量的结构复杂性,通过霍尔速度传感器测量开沟轴的速度间接反映转矩的变化规律。在液压无级变速系统的调速手柄转轴位置安装步进电动机,根据反馈信号改变变量泵斜盘转角,从而调节行进速度。同时,在后输出轴的前端安装电磁离合器,实现开沟器与主发动机动力的接通与切断。
3.2.2 施药与施肥启停子系统 在手持式金亮6HYC-80D型弥雾机上进行自动启停改造,分别由微型隔膜泵进行脉冲发动机供油、由继电器进行可控触点吸合打火、并由振动开关实现对脉冲发动机启动的判断,进而由电磁阀进行供药控制,由直流电动机实现弥雾机摆动的可控启停。同时,由直流电动机实现对排肥器运转的启停控制。
3.2.3 液位监测子系统 由主发动机和弥雾机脉冲发动机的需要,该多功能管理机上分别布置了54 L柴油油箱和20 L汽油油箱,2个油箱同350 L药箱均分别由WMY型扩散硅液位传感器(测量深度范围0~60 cm,测量精度0.5%)实现油量与药量的连续监测。
3.2.4 单片机与触摸屏 多功能果园管理机智能监控系统需满足开沟轴转速、行走速度、油箱液位和药箱液位与弥雾机振动开关信号的采集,和电磁阀、隔膜泵、HST调节电动机、排肥电动机、点火开关等多类执行对象的控制。根据智能监控系统的设计目标和输入/输出类型复杂、数量多的特点,选择AVR单片机系列中具有丰富的外设资源和串行通信接口的Atmega128单片机和LAVI777A触摸屏,并采用MODBUS协议实现二者的通信。
3.3 控制流程与功能实现
3.3.1 人机交互界面设计 管理机由单人驾驶并完成多功能作业,因而监控与操控的人机界面必须足够简明便捷。如图6所示,人机界面由油箱与主/副油箱的液量柱和各功能的启停键所构成。人机界面设计采用维控中文组态软件Levi Studio工程编辑器来实现,并利用Levi Studio软件完成编程。
3.3.2 开沟负荷反馈与分级响应控制 负荷反馈控制根据监测的开沟轴转速变化规律,识别其不同的开沟载荷特性,进而实现分级响应(图7)。
(1)过载调控。当开沟转速稳定值低于根据传动计算得到的理论转速时,表明处于过载开沟作业状态,则通过电动机转动以减小HST变量泵的容积,从而降低行走速度,使开沟作业载荷减小直至稳定于理论值。
(2)防堵调控。当出现开沟转速持续下降趋势,表明开沟器出现由于排土不畅或杂草缠绕等造成的堵塞,则通过控制步进电动机降低行进速度,直至开沟转速重新稳定于理论值,从而避免堵死停机。
(3)安全保护。当出现开沟转速的快速急剧下降,意味着开沟过程中遇到树根甚至石块等障碍物,则电磁离合器迅速切断开沟器的动力输入并进行报警,以实现对发动机、传动系统和开沟器的安全保护。
3.3.3 液量监控预警 针对果园作业中复杂的地面坡度、速度变化、地面性质变化、坑洞与障碍物干扰等多种工况干扰,通过对液位原始测量信号的“坡度校正+低通滤波+中值滤波”进行复合滤波处理,提供稳定准确的液量信息,以防止提供错误信息和发生误报警。当液量低于20%时,液量柱变黄预警;当液量低于10%时液量柱变红并声音报警,提示驾驶人员停止施药作业;当液量低于5%时,施药系统自动停止作业。
4 田间试验
4.1 样机开发
根据上述设计结果,成功开发了智能型果园多功能管理机样机,其主要尺寸参数如表1所示。
4.2 果园试验
4.2.1 试验条件 2014年11月23日,在镇江市京口区瑞京园桃园基地由江苏省农业机械试验鉴定站进行了样机试验鉴定(图8)。桃园土壤为黏土,坡度约10°,地面有部分杂草覆盖。0~40 cm土壤平均含水率为26.8 %,平均坚实度为16.53 kg/cm3。果树行距6 m,株距平均为3.5 m,平均果树高度2.5 m。
4.2.2 性能与参数 试验表明,该管理机的高度和宽度能满足行间作业要求,具有良好的通过性,但悬挂开沟器时机身较长,换行转弯较为困难;在果园坡度变化、地面不平、速度时变的复杂工况下,液量监控波动小,报警响应准确;机器能够实现各功能的一键启停切换与自变速控制功能。试验鉴定结果如表2所示,样机达到了设计要求。
5 结论
(1)根据果园规格及设计要求,设计开发了开沟、施肥、施药多功能一体式果园管理机,机身高度和宽度分别控制在190 cm和180 cm,从而满足果园低矮种植模式下的行间作业要求。
(2)设计了触摸屏式智能监控系统,实现了多功能一键启/停切换、复杂工况下的开沟自变速控制与液量准确监控的分级响应,保证了多功能管理机作业的可靠性及便捷操作性。
(3)试验结果表明该机通过性较好,在实际果园条件下顺利实现了一键启停、液量监控与自变速控制功能,满足了开沟、施药、施肥的设计指标要求,为果园作业提供了新型多功能一体装备。
(4)受限于宽深开沟要求和单圆盘式开沟结构,悬挂开沟器后机身仍然偏长,有待进一步优化。
参考文献:
[1]常有宏,吕晓兰,蔺 经,等. 我国果园机械化现状与发展思路[J]. 中国农机化学报,2013,34(6):21-26.
[2]Sanders K F. Orange harvesting systems review[J]. Biosystems Engineering,2005,90(2):115-125.
[3]Bodin A. Development of a tracked vehicle to study the influence of vehicle parameters on tractive performance in soft terrain[J]. Journal of Terramechanics,1999,36(3): 167-181.
[4]杨学军,严荷荣,徐赛章,等. 植保机械的研究现状及发展趋势[J]. 农业机械学报,2002,33(6):129-131,137.
[5]王海波,刘凤之,王孝娣,等. 我国果园机械研发与应用概述[J]. 果树学报,2013,30(1):165-170.
[6]闫国琦,张铁民,徐相华,等. 我国微耕机技术现状与发展趋势[J]. 安徽农业科学,2008,36(25):11137-11139,11148.
[7]李 倩,宋月鹏,高东升,等. 我国果园管理机械发展现状及趋势[J]. 农业装备与车辆工程,2012(2):1-3,7.
[8]王晶晶,王文斌,罗 微,等. 南方长期作物配方施肥技术的问题与对策[J]. 中国农学通报,2010,26(9):220-225.
[9]张书慧,马成林,杜巧玲,等. 精确农业自动变量施肥机控制系统设计与实现[J]. 农业工程学报,2004,20(1):113-116.
[10]刘成莲. 2BMF-5型免耕施肥播种机排种(肥)箱的设计[J]. 农业技术与装备,2008(12):20-21.
[11]刘继展,王 芹,詹国祥,等. 果园双摆弥雾施药系统设计[J]. 农业机械学报,2014,45(12):109-116.
[12]陈玉仑,丁为民,汪小旵,等. 稻麦联合收获开沟埋草多功能一体机设计[J]. 农业机械学报,2009,40(8):62-66.
[13]中国农业机械科学研究院. 农业机械设计手册:上[M]. 北京:中国农业科学技术出版社,2007:237-238.
[14]邱宣怀,郭可谦,吴宗泽,等. 机械设计[M]. 4版. 北京:高等教育出版社,2004:251.
[15]张玉川,蔡 禺. 进口液压挖掘机国产化改造[M]. 成都:西南交通大学出版社,1999:60.
猜你喜欢
今日农业(2022年16期)2022-09-22
快乐语文(2021年27期)2021-11-24
中阿科技论坛(中英文)(2021年2期)2021-03-17
阅读(低年级)(2019年9期)2019-11-15
农机化研究(2018年8期)2018-07-10
小学生作文(低年级适用)(2017年9期)2017-10-13
中国农业文摘-农业工程(2016年5期)2016-04-12
儿童故事画报(2013年3期)2013-06-24
种业导刊(2012年7期)2012-08-15
小哥白尼·军事科学画报(2009年9期)2009-09-14
