声纳阵列网络基于移动信标到达角的渐进最优节点自定位算法*
2016-05-03 12:35骆吉安谭智文郭云飞杭州电子科技大学物联感知与信息融合实验室杭州3008七一五研究所声纳技术国防科技重点实验室杭州3002
传感技术学报 2016年3期
骆吉安,谭智文,郭云飞(.杭州电子科技大学物联感知与信息融合实验室,杭州3008;2.七一五研究所声纳技术国防科技重点实验室,杭州3002)
声纳阵列网络基于移动信标到达角的渐进最优节点自定位算法*
骆吉安1,2*,谭智文1,郭云飞1
(1.杭州电子科技大学物联感知与信息融合实验室,杭州310018;2.七一五研究所声纳技术国防科技重点实验室,杭州310012)
摘要:针对水下声纳阵列网络节点自定位问题,提出一种基于移动信标到达角的三维总体最小二乘(TLS)节点自定位算法。首先给出了基于方位角和俯仰角的变量含误差模型,并根据该模型提出三维TLS算法,证明三维TLS算法随信标广播次数增加是渐进最优估计,仿真结果验证所提出算法的均方根误差渐进达到CRLB。
关键词:声纳阵列网络;节点自定位;总体最小二乘;移动信标;方位角和俯仰角
项目来源:浙江省信号处理重点实验室开放基金项目(ZJKL_4_SP-OP2014-01);七一五所声纳技术国防科技重点实验室开放基金项目(KF201303)
近年来,由带有测向功能的声纳阵列组成的声纳阵列网络作为无线传感器网络的重要分支得到了快速的发展[1]。声纳阵列网络的原理是将声纳阵列与无线传感网络相结合,实现信息协同处理,并在军事方面的舰船、潜艇、AUV等目标跟踪以及民用方面的水下探测器导航等领域有着重要应用。为实现上述应用,一方面节点自身的位置信息是目标跟踪等多传感器融合算法的前提[2],另一方面,为设计高效的网络路由[3]、休眠调度[4]、节点选择[5]、网络安全[6]等网络管理协议,节点位置是不可缺少的已知条件。因此,节点的自定位对声纳阵列网络具有十分重要的意义。
目前节点自定位算法根据定位过程中是否进行测距可以分为两大类,一类是利用网络拓扑结构实现自定位的非测距算法,如DV-Hop算法、APIT算法、MDS算法及质心算法等[7],这类算法的定位精度较差,但是硬件实现成本较低。另一类算法是测距定位算法,如信号接收强度(RSSI)[8],到达时间(TOA)或到达时间差(TDOA)[9],以及到达角(AOA)[10-11]等方法。与非测距算法相比,这类算法具有较高的定位精度,但硬件成本也相对较高,如为实现对水下信号源的测向,每个节点需要安装一个声纳阵列。本文考虑基于方位角和俯仰角的三维节点自定位算法。在文献[12]中,Badriasl提出了一种三维伪线性估计(PLE)算法,通过对方位角和俯仰角的测量方程进行线性化,将未知节点估计转化为PLE模型求解,并分析了PLE算法通过笛卡尔坐标系旋转可以显著改变算法性能,从而有效的减小了系统偏差。文献[13]和[14]中,Doǧançay分析PLE算法是有偏估计,并且PLE估计的偏差不随测量数的增加而减少。Bishop[15]指出纯方位角极大似然(ML)定位算法的精度依赖于初始位置是否准确,另外ML算法在传感器个数较少或者观测误差大的情况下容易发散。文献[16]提出了一种基于角度和频率联合量测的三维ML算法,在角度估计误差较大、频率测量误差较小的条件下,基于角度和频率联合量测的ML算法比基于角度的ML算法精度更高。
节点自定位相关应用中,信标节点一般需要配备昂贵的定位设备或采用人工标定等方式精确的获得自身位置信息。传统的无线传感器网络节点往往部署在陆地环境,因此可利用GPS设备或者人工标定方式比较容易进行信标节点的位置标定。而声纳阵列网络往往部署在复杂多变的海水环境中,主要利用声波实现水下通信和组网[17]。由于无线电波在海水中衰减严重,信标节点无法利用成熟的GPS定位技术,同时通过人工标定的方式也更为困难。现有文献主要考虑信标节点处于静态下的节点自定位问题[7,9],在这种信标节点布设方式下,节点自定位精度的提高是通过增加信标节点的数目来实现,那就意味着定位精度的提高必须以增加系统成本为代价。采用移动信标进行声纳阵列网络自定位的方式,只需单个信标即可完成自定位,降低了设备费用和人工成本,同时可以提高信标节点的灵活性且布设范围更广,因而具有重要的应用价值。
本文考虑基于移动信标的自定位方案,在此基础上提出一种三维总体最小二乘(TLS)的节点自定位方法,该方法引入一种基于方位角和俯仰角的变量含误差模型,并在该模型下将未知节点位置估计转化为TLS求解问题,该方法与PLE算法相比消除了估计偏差问题,随着移动信标广播次数的增加,其均方误差能达到CRLB下界;与ML算法相比,该方法在观测误差较大或者数据量较少的情况下,不存在发散问题。
本文以下第1部分描述声纳阵列网络基于移动信标到达角节点自定位问题;第2部分给出基于方位角和俯仰角的变量含误差模型,结合该模型提出了三维总体最小二乘节点自定位算法,并分析该算法的渐进最优性;第3部分是基于方位角和俯仰角定位的CRLB性能分析;第4部分对三维PLE算法、ML算法、以及本文所提的算法进行仿真实验并分析这三种算法的优缺点;最后是本文的总结。
1 基于移动信标到达角的水下声纳阵列网络节点自定位
考虑图1所示的带有移动信标的水下声纳阵列网络,一个带有吊放主动声纳机动轮船按预先设定的轨迹作匀速直线运动,轮船利用GPS信号标定自身位置并作为信标节点。大量声纳阵列节点通过浮标随机布放在水下不同的深度,构成水下声纳阵列网络。采用移动信标进行节点自定位,移动信标实时广播自己当前的位置、移动速度等信息,未知节点通过声纳阵列测量自己和信标节点的方位角和俯仰角,最终利用信标节点不同时刻的位置、相应的方位角和俯仰角信息,实现自定位。

图1 水下声纳阵列网络节点自定位示意图
假设信标节点在第k次广播时的状态记为sk=[sx,k,vx,k,sy,k,vy,k,sz,k,vz,k]T∈̌6,其中[·]T表示转置,(sx,k,sy,k,sz,k)表示信标的位置,(vx,k,vy,k,vz,k)表示信标的速度,̌n表示所有n维实数向量。我们记p=[px,py,pz]T作为网络中某一待估计节点位置的坐标。未知节点第k次测量信标节点的方位角和俯仰角:

其中θk和ϕk分别表示第k次观测时未知节点对应于信标节点的方位角和俯仰角,nk和wk是独立同分布零均值高斯白噪声,方差分别为, k=1,…,K,K≥3。方位角θk和未知节点位置几何关系如下:

将式(2)交叉相乘整理得:

我们令

其中bθ,k与信标节点第k次广播时的位置有关。我们定义diag(sinθ),diag(cos θ),A0和A1为:
我们记xs,ys为K维向量,xs=[sx,1,…,sx,K]T,ys=[sy,1,…,sy,K]T,其中sx,k和sy,k分别是向量xs和ys的第k个元素。将式(3)写成向量形式:此外,信标节点与未知节点的俯仰角非线性关系是:

其中rk的计算公式如下:

将式(11)交叉相乘整理得:

我们令

同样的,我们定义diag(sinϕ),diag(cos ϕ),A2和zs为:
由式(13),式(14)写为向量形式,得到另一个伪线性表达式:

其中Aθ,ϕ和bθ,ϕ的计算公式如下:
注意式(9),式(10),式(20),式(21)中的Aθ,bθ,Aθ,ϕ和bθ,ϕ都是未知的。相反,只有它们的测量值是可以用的,记为Aθ̌,bθ̌,Aθ̌,ϕ̌和bθ̌,ϕ̌,令Ǎ=, b̌=,则式(8),式(19)可以合写成:

其中式(22)中Ǎ∈̌2K×3,b̌∈̌2K×1,η是噪声向量,p是待估计参数,可由最小二乘估计得到[13]:

其中||∙||表示欧几里德范数,求解式(23)可得:

式(24)被称为伪线性最小二乘估计(PLE),该结果和极大似然算法(ML)[18-19]将用于第5节中的算法仿真比较。在式(22)中,角度测量噪声出现在Ǎ和b̌中,使得p̌PLE不是无偏估计,并且其偏差并不会随着测量次数趋向于无穷而消失。一种改进的方法是完全最小二乘(TLS)算法,它可以减小位置估计偏差[20-21]。然而,伪线性方程Aθp=bθ和Aθ,ϕp=bθ,ϕ的同时引入使得三维纯方位角TLS算法不同于二维TLS算法,参量θ、ϕ与位置坐标具有很强的非线性耦合关系,我们需要推导新的变量含误差EIV (Error in Variable)模型,并在该模型下验证三维纯方位角TLS算法的渐进最优性。为了推导完全最小二乘(TLS)算法,我们首先需要假定认为测量噪声是上述公式的一种EIV模型。在第2小节中,我们将说明三维节点自定位的EIV模型的测量误差形式是具有块对角结构的矩阵。
2 三维总体最小二乘节点自定位
2.1基于方位角和俯仰角的变量含误差模型
由于式(9),(10),(20),(21)中的Aθ,bθ,Aθ,ϕ和bθ,ϕ均是未知的,我们只能利用θ和ϕ的观测值θ̌和ϕ̌。将θ̌和ϕ̌分别代入Aθ,bθ,Aθ,ϕ和bθ,ϕ,并分别记为Aθ̌,bθ̌,Aθ̌,ϕ̌和bθ̌,ϕ̌。当式(1)中方位角和俯仰角的测量误差足够小,我们有如下近似:


其中k=1,…,K。将式(25)~(28)代入Aθ̌,bθ̌,Aθ̌,ϕ̌和bθ̌,ϕ̌,得到新的EIV模型:

式中A∈̌2K×3,b∈̌2K×1,R∈̌2K×4K,W∈̌4K×4。

其中应当指出的是,式(31)中矩阵R里面的参数计算公式如下:
从推导中我们发现上述三维节点自定位的EIV模型(29)中矩阵R具有块对角结构。因此,该EIV模型不同于文献[20]中的标准EIV模型,我们需要推导该模型下TLS算法的渐进最优性。
如果测量噪声足够小,可以忽略式(31)中的RθRϕ,由此式(31),(32)中的R和W可以简化为:
2.2三维总体最小二乘节点自定位
在文献[21]中,当Ǎ和b̌均存在测量误差时,利用TLS算法可以减小Ǎ和b̌中的误差,从而改善PLE估计的性能。通过让Ǎ和b̌中的误差Froben⁃ius范数最小,同时满足等式Ap=b,TLS算法实质是一个带约束的最优化问题:

其中ΔA=A-Ǎ,Δb=b-b̌,||·||F表示Frobenius范数,式(46)的解我们用下面的引理1给出[20-22]:
引理1考虑到EIV模型(29)中,A,b和R,W分别由式(30)和式(31),(32)给出,我们定义:

4×4阶矩阵Γ̌的广义特征值分解可以表示成:

其中λi是第i个特征值,vi是对应的特征向量,i=1,…,4。假设λmin是最小的特征值,vmin是特征值λmin所对应的特征值向量,式(46)的解为:

为获取TLS估计p̌TLS,我们需要使用式(49)进行广义特征值分解。然而在算法实现中,由于W中未知节点对应于信标节点的真实方位角θ和俯仰角ϕ是未知的,我们无法直接使用W矩阵。在高信噪比的假设条件下,我们用带噪声的矩阵W̌近似表示W。在低信噪比的假设条件下,我们用W̌获得初始估计,并且利用该估计值计算方位角和俯仰角估计并更新W。一般来讲,W̌迭代估计2~3步即可达到满意的估计性能。
综上所述,三维节点自定位的TLS算法流程如下:
第1步,通过式(32)生成矩阵W̌并计算∑̌=W̌TW̌;
第2步,生成增广矩阵[Ǎ,-b̌],计算协方差矩阵Γ̌;
第3步,通过式(49)进行广义特征值分解;第4步,通过式(50)得到估计结果;
第5步,利用估计结果更新矩阵W̌,并重复上述步骤。
2.3三维总体最小二乘算法渐进最优分析
第2.2小节我们给出了三维节点自定位TLS算法,然而定位结果的渐进最优性仍需要进一步证明。假设方位角和俯仰角量测噪声的方差σ2θ,k和是已知的,并且我们记,,R和W的计算公式:
假设方位角和俯仰角的观测噪声是不相关的,则E{RTθRϕ}=0,接着噪声矩阵R的协方差阵可以表示成:E{RTR}=σ2θI。假设信标节点广播次数K趋向于无穷的条件下,引理2给出了三维TLS节点自定位算法渐进最优性。
引理2考虑到EIV模型(29)中,A,b和R, W分别由式(30)和(51)和(52)给出,假设和是已知的并且足够小。令λmin为Γ̌相对于∑的广义最小特征值和对应的特征向量vmin,

其中Γ̌和∑在引理1式(47)和(48)中定义,式(50)的TLS解是未知节点位置参数p的渐进极大似然(ML),并且当K→∞时,

证明假设信标广播次数K≥3,式(52)所述的矩阵W∈̌4K×4是列满秩的,同时存在矩阵W的极分解且计算方法如下:

其中W∈̌4K×4是正交矩阵,∑1 2̌4×4是对称矩阵。注意到UTU=I和∑=WTW,I是4×4的单位矩阵。式(29)两边同乘以矩阵∑-1/2,则EIV模型变为:

我们记Γ=[A-b]T[A-b],Γs=∑-1/2Γ∑-1/2。通过文献[16]中引理3.1的结果,若:


这表明:

以上一致性结果表明下式成立:

证明完成。
3 CRLB分析
在本节中,我们给出基于移动信标的三维节点自定位的克拉美罗下界(CRLB)。对于任意的无偏估计量,它的方差肯定大于或者等于一个给定的值,这个值就是CRLB。求取CRLB为比较无偏估计量的性能提供了一个标准。从相对于移动信标的方位角测量值{θ̌1,…,θ̌K}和俯仰角测量值{ϕ̌1,…,ϕ̌K}中估计未知节点位置参数p,其中θ̌k和ϕ̌k的表达式见式(1),k=1,…,K。假设观测噪声nk和wk分别是零均值高斯白噪声,nk和wk互相独立,并且它们的方差分别记为,推导Fisher信息矩阵J:
我们记:Δxk=px-sx,k,Δyk=py-sy,k,Δzk= pz-sz,k。根据式(2)和式(11)的几何关系,和的表达式为:
其中

位置参数p的无偏估计量记为p̌,其CRLB是C=J-1。位置均方根误差的下界计算方法为:

其中tr(·)表示矩阵的迹。x轴,y轴,z轴位置估计误差的CRLB分别为Cp,x=其中Cij是C的第i行第j列的元素。从式(63)我们可以看出,位置估计p̌的CRLB与观测噪声方差和测量次数K有关,因此下面我们用两个实例来分析不同观测噪声水平和不同观测时间对CRLB的影响。
例1参数设定:考虑声纳阵列节点随机分布在1 000×1 000×1 000 m3空间中,未知节点坐标:p=[905,126,862]T,假定信标做匀速直线运动,其初始状态:s1=[0,1.434 5,4.789 8,1 000,0]T。由于信标只在x-y平面运动,其运动速度:v==5 m/s。
我们固定移动信标广播次数K=40,信标每次广播时间间隔:T=5 s,改变方位角和俯仰角的观测噪声方差:=(π/180)2×噪声因子,k=1,…,K,其中“噪声因子”的变化范围为:-20 dB~20 dB,所得结果如图2所示。图2表明,位置估计p̌的CRLB值会随着测量噪声的方差增加而增加。
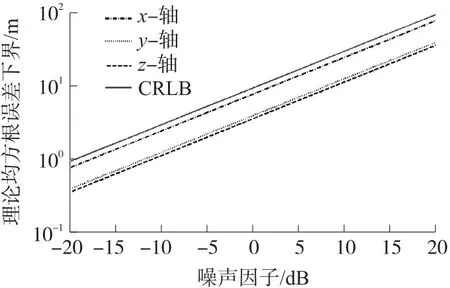
图2 不同噪声因子影响下CRLB随变化曲线
例2待估计节点位置和移动信标初始状态参数设置见实例1,我们设定方位角和俯仰角观测噪声方差为:=(π/180)2,k=1,…,K,然后改变信标广播次数K,K的变化范围为:100~1 000得到位置估计CRLB随观测次数变化的CRLB结果,如图3所示。从图3可以看出,p̌的CRLB会随着信标广播次数的增加而减小。

图3 不同移动信标广播次数K下CRLB变化曲线
4 算法仿真
在本节中,我们采用MATLAB2010b版本仿真软件进行仿真实验,验证所提出节点自定位算法的有效性。我们通过比较分析两种不同几何位置参数情况下的三维伪线性估计(PLE)[9]、最大似然(ML)[18]和总体最小二乘(TLS)节点自定位算法的性能。
考虑在1 000 m×1 000 m×1 000范围内移动信标通过实时广播自身位置和速度信息对未知节点进行定位。参数设定:假定信标做匀速直线运动,其初始状态:s1=。信标只在x-y平面运动,其运动速度:v== 5 m/s,信标每次广播时间间隔:T=1 s,方位角和俯仰角的量测噪声标准差相同,且分别设置为:σθ,k=σϕ,k:π/180,2π/180,3π/180,4π/180,5π/180,k=1,…,K。当未知节点位于(200,300,800)m时,我们将三维PLE,ML和TLS算法运行10 000次得到随方差变化的位置均方根误差(RMS)曲线,如图4(a)~4 (d)所示。
从图中可以看出ML和TLS算法优于PLE估计,它们的RMS曲线均趋近于CRLB。然而,当我们将未知节点坐标改为(1 000,1 000,200)m时,ML算法发散,如图5(a)~(d)所示,发散问题会随着移动信标广播次数K的增加而改善,当K=200时,ML算法不再发散,而本文提出的三维TLS算法则不存在发散问题,且TLS算法RMS误差均小于PLE算法。
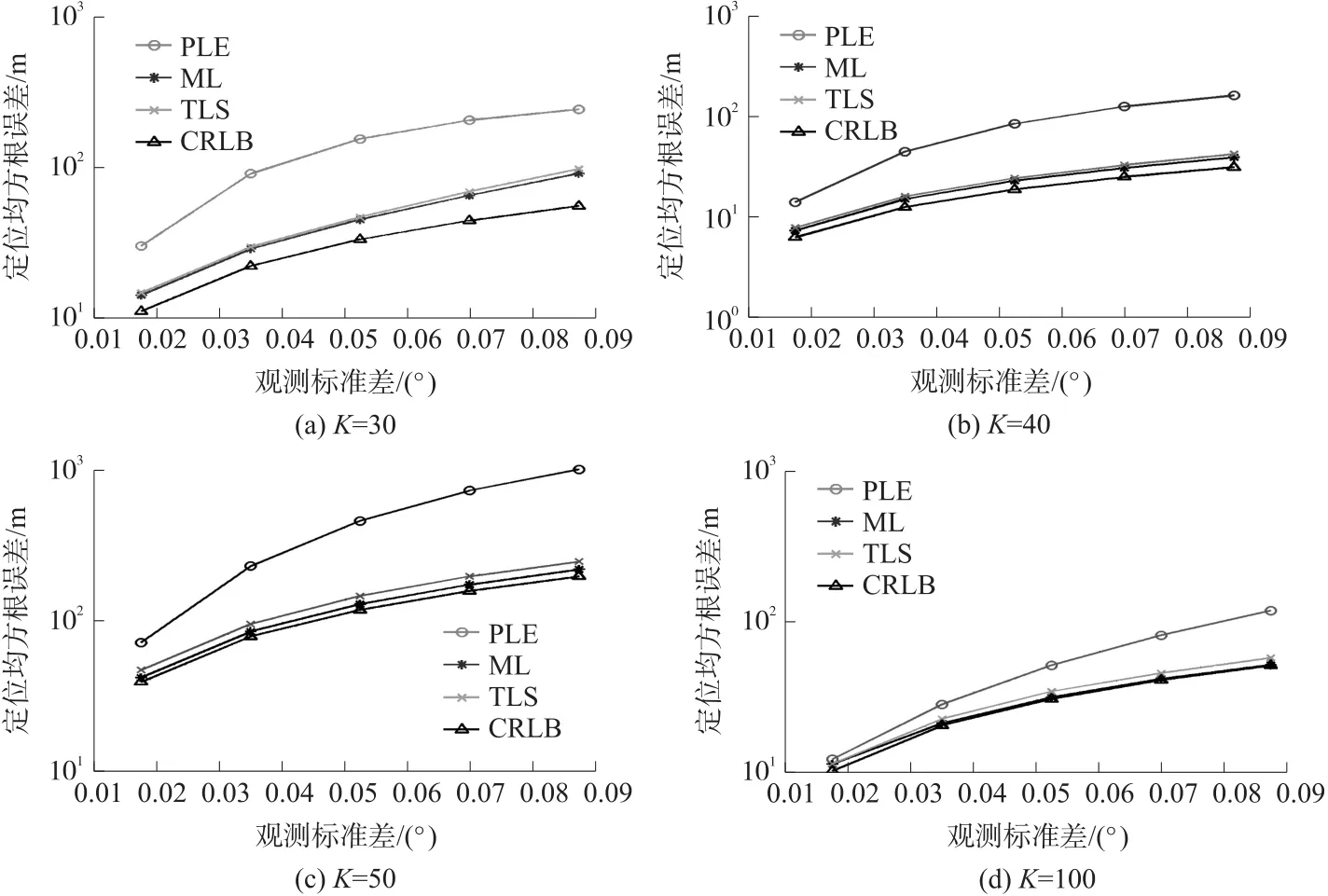
图4 不同观测标准差下的定位均方根误差比较,p=[200,300,800]T
接着我们将方位角和俯仰角的量测噪声标准差固定在σθ,k=σϕ,k=π/180,k=1,…,K,同时改变移动信标广播次数K,将三维PLE,ML和TLS算法运行50次后得到相应的RMS曲线,如图6(a)、6(b)所示,其中图6(a)是未知节点位于(200,300,800)m时运行得到,图6(b)则是对未知节点位于(1 000,1 000,200)m时的位置估计示意图。我们发现随着移动信标广播次数K的增加,ML和TLS算法趋向于CRLB,而PLE算法是有偏估计,其偏差不会随着移动信标广播次数K的增加而渐进达到CRLB。
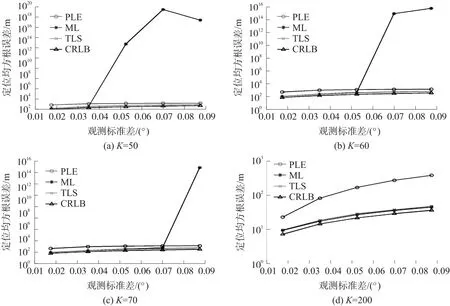
图5 不同观测标准差下的定位均方根误差比较,p=[1 000,1 000,200]T
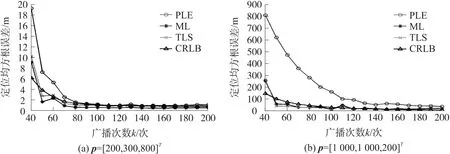
图6 不同移动信标广播次数K下的定位均方根误差比较,σθ=σϕ=π/180
最后,我们比较三维PLE,ML和TLS算法的计算时间,计算机操作系统:Microsoft Windows 7 Ultimate;CPU:奔腾双核E5300 @2.60 GHz;内存:2.00 GB,MATLAB:2010b。经过10 000次蒙特卡洛实验后得到算法单次运行平均时间如表1所示。

表1 三维PLE,ML和TLS算法运行时间比较
从表1可以看出,TLS和PLE算法运行时间基本一致,且明显快于ML算法。综上所述,TLS算法与ML算法相比从运行时间和算法稳定性上均优于ML算法;TLS算法与PLE算法相比运行时间上与PLE算法大致相同且具有较高的估计精度。
5 结论
声纳阵列网络是无线传感器网络的一个重要分支,在目标定位、跟踪和导航方面有重要应用价值,自定位是将这些应用付诸实践的前提。在本文中,我们提出了基于移动信标方位角和俯仰角渐进最优节点自定位算法,通过将方位角和俯仰角非线性测量方程线性化,我们得到关于方位角和俯仰角的一类变量含误差模型。在该模型基础上,我们提出一种三维总体最小二乘(TLS)算法实现节点自定位,并证明该算法是渐进最优的,即随移动信标广播次数的增加能够渐进达到CRLB。仿真结果表明所提出的TLS算法在算法稳定性和计算时间上优于极大似然算法,在定位精度上优于伪线性估计算法。
参考文献:
[1]王营冠,王智.无线传感器网络[M].电子工业出版社,2012.
[2]Goodman G L. Detection and Classification for Unattended Ground Sensors. In Proceedings of Information,Decision and Con⁃trol[C]. Adelaide,SA,Australia,1999:419 -424.
[3]Mauve M,Widmer J,Hartenstein H. A Survey on Position-Based Routing in Mobile Ad-Hoc Networks[J]. IEEE Network,2001,15 (6):30-39.
[4]Wang Z B,Lou W,Wang Z,et al. A Novel Mobility Management Scheme for Target Tracking in Cluster-based Sensor Networks,IEEE International Conference on Distributed Computing in Sen⁃sor Systems(DCOSS)[C]. Santa Barbara,USA,June,2010.
[5]卢旭,程良伦,罗世亮.无线传感器网络自适应目标跟踪节点调度算法[J].通信学报,2015,36(4):1-11.
[6]彭辉,陈红,张晓莹,等.无线传感器网络位置隐私保护技术[J].软件学报,2015,26(3):617-638.
[7]刘政.基于粒子群优化的多维标度节点定位算法[J].传感技术学报,2015,28(8):1228-1232.
[8]刘政.基于接收信号强度指示的误差自校正定位算法[J].传感技术学报,2014,27(7):970-975.
[9]薛锋,刘忠,许江湖.水下无线传感器网络节点的自定位方法[J].海军工程大学学报,2010,22(4):49-55.
[10]蒋鹏,覃添,陈岁生.基于AOA降维和同心圆定位的三维传感器网络节点自定位方法[J].传感技术学报,2012,25(7):999-1006.
[11]Nath B,Niculescu D. Ad Hoc Positioning System(APS)Using AoA,in Proc. IEEE Conf. Computer Commun.(INFOCOM)[C]. San Francisco,Apr.,2003:1734-1743.
[12]Badriasl L,Kennedy H,Finn A. Effects of Coordinate System Ro⁃tation on Two Novel Closed-from localization Estimators Using Azimuth/Elevation[C]. International Conference on Information Fusion,2013:1797-1799.
[13]Doǧançay K. Bearings-only Target Localization Using Total Least Squares[J]. Signal Processing,2005,85(9):1695-1710.
[14]Doǧançay K. On the Bias of Linear Least Squares Algorithms for Passive Target Localization[J]. IEEE Trans. Signal Processing,2004,84(3):475-486.
[15]Bishop A N,Anderson B D O,et al. Bearing-only Localization Us⁃ing Geometrically Constrained Optimization[J]. IEEE Trans. on Aerospace & Electronic Systems,2009,45(1):308-320.
[16]Becker K. Three-dimensional Target Motion Analysis Using Angle and Frequency Measurements[J]. IEEE Trans. on Aerospace & Electronic Systems,2005,41(1):284-301.
[17]胡钢,张瑞,刘宴佳.水下传感器网络移动节点定位问题研究[J].传感技术学报,2012,25(2):268-272.
[18]Kaplan L M,Qiang L,Molnar N. Maximum Likelihood Methods for Bearings-only Target Localization,in Proceedings of the IEEE International Conference on Acoustics,Speech,and Signal Pro⁃cessing[C]. 2001,5:3001-3004.
[19]Wang Z,Luo J A,Zhang X P. A Novel Location-penalized Maxi⁃mum Likelihood Estimator for Bearing- only Target Localization [J]. IEEE Trans. Signal Processing,2012,60(12):6166-6181.
[20]Gleser L J. Estimation in a Multivariate“Errors in Variables”Re⁃gression Model:Large Sample Results[J]. Annals of Statistics,1981,9(1):24-44.
[21]Huffel S V,Vandewalle J. The Total Least Squares Problem:Com⁃putational Aspects and Analysis[M]. In:Frontiers in Applied Mathematics,1991.
[22]Gu G X. A Novel Power-bearing Approach and Asymptotically Op⁃timum Estimator for Target Motion Analysis. IEEE Trans. on Sig⁃nal Processing,2011,59(3):912-922.

骆吉安(1983-),男,博士,讲师,杭州电子科技大学自动化学院信息与控制研究所,主要研究方向为无线传感器网络,目标定位与跟踪,目标检测,luoji⁃an@hdu.edu.cn;
谭智文(1991-),男,硕士研究生,杭州电子科技大学自动化学院信息与控制研究所,主要研究方向为目标定位与跟踪;
郭云飞(1978-),男,博士,副教授。杭州电子科技大学自动化学院信息与控制研究所,主要研究方向为目标跟踪、弱目标信号检测、非线性滤波、信息融合等。
Asymptotically Optimum Bearing-Only Self-Localization for Sonar Array Network Nodes Based on Moving Beacon*
LUO Jian1,2*,TAN Zhiwen1,GUO Yunfei1
(1.Key Lab for IOT and Information Fusion Technology of Zhejiang,Hangzhou Dianzi University,Hangzhou 310018,China;2.715 Research Institute,National Defense Science and Technology Key Laboratory of Sonar Technology,Hangzhou 310012,China)
Abstract:This paper presents a 3D total least-squares(TLS)algorithm to solve the self-localization problem using azimuth/elevation angles with regarding to a moving beacon in a sonar array network. First we linearize the azimuth and elevation measurement equations and show that the new model fits a class of error in variables(EIV)models. Then the 3D TLS algorithm is proposed based on the EIV model and it is proved to be asymptotically optimal. The simulations show that the mean squared error of the proposed estimator achieves the CRLB asymptotically.
Key words:sonar array networks;node self-localization;total least-squares;movingbeacon;azimuth/elevation
doi:EEACC:723010.3969/j.issn.1004-1699.2016.03.017
收稿日期:2015-11-06修改日期:2015-12-14
中图分类号:TP393
文献标识码:A
文章编号:1004-1699(2016)03-0403-08