仿人服务机器人的平衡控制
2016-05-25 00:37邬依林葛伟亮
中山大学学报(自然科学版)(中英文) 2016年5期
张 爽,邬依林,葛伟亮,蓝 恺
(1. 电子科技大学航空航天学院,四川 成都 611731;2. 广东第二师范学院计算机科学系,广东 广州 510310;3. 电子科技大学自动化工程学院,四川 成都 611731)
仿人服务机器人的平衡控制
张 爽1,邬依林2,葛伟亮3,蓝 恺3
(1. 电子科技大学航空航天学院,四川 成都 611731;2. 广东第二师范学院计算机科学系,广东 广州 510310;3. 电子科技大学自动化工程学院,四川 成都 611731)
仿人机器人具有复杂的耦合非线性特性,因此仿人机器人的平衡控制具有重要的研究意义。针对仿人服务机器人系统,研究智能仿人服务机器人的平衡控制。首先,研究智能双足仿人机器人HUBO的行走与站立时平衡模式,分析HUBO基于ZMP的步态规划方法,并分析HUBO内部各个关键控制器的控制方式,以保证机器人行走时的平衡。然后,通过这些信息,使用Simulink对各控制器进行仿真,验证控制效果。最后,通过仿真分析、改进各项控制参数,进一步改善了仿人机器人步态平衡控制,达到较好的步态平衡控制效果。
仿人机器人;平衡控制;ZMP算法;步态规划
随着机器人产业的不断发展,仿人服务机器人得到越来越多关注[1]。仿人机器人具有较好的环境适应性,特别是在高低不平和有障碍的复杂环境上行走,具有一定的优势。由此可见,仿人机器人在家庭环境下服务,对于提高人们的生活质量有着重要的意义。近年来,仿人机器人的研究引起了世界各国机器人专家的重视。目前,仿人机器人主要用于服务业、助老助残、娱乐业与教育业,与此同时它正向军事、航空、航天等各个领域发展。
机器人在服务和辅助领域具备许多人类所无法比拟的优点,例如:稳定的重复训练,常规动作帮助,提供实时反馈、远程训练等。但是,目前对机器人的研究仍然处于起步阶段。现有的服务机器人依旧存在着许多不足[2]。常见的服务机器人存在着动作模式过于简单,训练策略比较单一,效率较低等问题。轮式服务机器人存在协助性有限,跨越障碍不便等局限性,并且轮式机器人一般使用大延迟、高度非线性的复杂系统,建立精确的数学模型十分困难[3]。多足机器人动作耗时,设计成本也相对较高,训练方式不是主动实现,所以使用者基本上是以被动方式进行训练,在训练过程中,使用者的运动以及施加在器械上的力度往往很难保持良好的一致性。
相比于其他类型的服务机器人,仿人机器人具有诸多明显优点。例如,仿人机器人具有与人体较为接近的关节结构和分布,所以能够较好地模仿人体自然平滑的运动,像人类一样完成一些复杂而又灵活的肢体动作,这样就能实现与人协同作业或者替代作业的任务[4-5]。因此,本文选择以仿人机器人为研究方向,主要通过在实际应用中遇到的问题,研究仿人机器人的平衡控制和行走模式等问题。

图1 HUBO KHR-4机器人Fig.1 HUBO KHR-4 Robot
韩国科技先进研究院研制的仿人机器人HUBO(见图1),是国际上较为先进的仿人机器人之一。HUBO机器人的设计要求为低成本、重量轻且结实、简单的运动学、高刚性、无齿隙、自律、类人尺寸、敏捷。设计策略为保持零力矩臂来抗衡重力,尽可能避免悬臂设计,避免复杂的机械设计,允许电机在某时刻过载或减速等。HUBO拥有37个自由度,各关节采用直流电机和谐波减速齿轮,谐波减速齿轮将直流电机的转速按一定比例压缩,使电机转动易于控制。机器人采用了三类共八个传感器,双手手腕和双脚脚腕分别装了四个力矩传感器,可以检测一个法向力和两个力矩。重心处装了一个惯性传感器,主要用于测量并反馈机器人行动时Z轴的加速度。双脚装了两个倾斜传感器,用于测量地面倾斜度。HUBO机器人有复杂的在线步态控制结构,但是各控制结构都是较为简单的单环反馈控制,仍有一定改进空间。
1 HUBO的步态控制
要让机器人做出走起来的动作,就要对双足机器人进行步态规划[6-9]。HUBO 机器人的步态规划结合了基于人体运动的动作学匹配方法和基于力学稳定性的规划方法,再结合机器人的步行实验,利用逆运动学方法生成基于 ZMP轨迹及 COM 轨迹的步态轨迹,让 HUBO 走起来,最后用多种传感器反馈在线控制其动态平衡,调整一些相关关节来改进机器人的实际 ZMP,保证 ZMP 始终处于支撑区域内。
本节将简要介绍HUBO的离线步态轨迹规划与双足机器人在线动态平衡控制器[8-10]。HUBO的基本动作控制原理如图2所示。HUBO每个电机的位置都是用编码器反馈的PD控制。为了平滑的控制37个电机,主控机要以精确的时间间隔传送参考位置数据。动作生成器生成动作后,由逆运动学解出每个关节的参考角度数据,HUBO上主控机以10 ms(100 Hz)的时间间隔把参考位置数据传送到所有电机控制器上,然后每个电机控制器以1 ms(1 kHz)的间隔对参考位置进行线性插值。相反地,传感器以100 Hz的频率将反馈信息传到主控机上,通过反馈控制电机转到精确的位置。
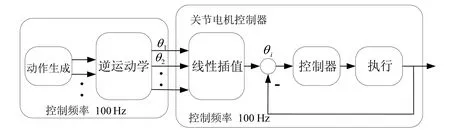
图2 HUBO动作控制过程Fig.2 Control process of HUBO
1.1 HUBO的步态控制过程
HUBO的步态控制基于两个过程,一个是离线的步态轨迹规划,一个是在线的动态反馈调节补偿过程[11-12]。为了让机器人走动,先由人类行走动作及机器人的行走经验相结合,根据ZMP轨迹规划出盆骨中心处的轨迹及脚步的轨迹,创建机器人行走动作,然后由逆运动学解出各关节角度,控制机器人完成基本的步行动作。由于上身动作造成的惯性力、身体抖动、地面不平及倾斜等原因,即使是一个设计非常好的步态轨迹也有可能导致机器人摔倒,因此,只利用创建出的轨迹并不能实现平稳的动态行走。要实现HUBO机器人适应地面的稳定行走还需要基于传感器反馈补偿的在线动态步态控制过程。HUBO的动态平衡控制使用了3大类(实时平衡控制,步态控制,预测运动控制)共10种控制器。实时平衡控制包含阻尼控制器、ZMP补偿器、着地方向控制器、着地时间控制器、震动控制器;步态控制包括盆骨摆动幅度控制器、躯干旋转倾斜控制器;预测运动控制包括着地位置控制器、倾斜控制器[11, 13]。
为了在不同时刻分别调用不同的控制器,也便于辨识当前动作与预测下一个动作,HUBO一个周期的动态步态控制分为5个阶段(如图3):
阶段一:抬起左腿至最大弯曲和高度;
阶段二:放下左腿直到与地面完全接触;
阶段三:抬起右腿至最大弯曲和高度;
阶段四:放下右腿直到与地面完全接触;
阶段五:继续阶段一或三然后机器人进入双脚着地的停止姿势。

图3 HUBO一个周期的动态步态过程Fig.3 A Periodic dynamic gait process of HUBO
1.2 HUBO的离线步态轨迹规划
为了规划HUBO的离线步态轨迹,将HUBO的步行周期简化为倒立摆模型的摇摆,如图4所示。可分为单足支持阶段 (Single support phase, SSP)和双足支持阶段 (Double support phase, DSP)。X方向和Y方向都可以简化为倒立摆模型。

图4 HUBO倒立摆模型Fig.4 Inverted pendulum model of HUBO
盆骨中心为HUBO的质心点,倒立摆模型可写为:
(1)
T是踝关节的扭矩,m是质心,θ是倒立摆的倾斜角度,把两边同除mg:
(2)
令Fz=mg,lθ=Ymc,假设θ<5°,可以得到:
(3)
这里,Fz是地面反作用力;Ymc是重心的位置;ZMP由踝关节处的扭矩和反作用力得到,它的动态等式为:
(4)
假设质心摇摆轨迹为正弦函数:
Ymc=Asinωt
(5)
得到:
(6)
其中步行频率
于是规划出如图5的COM轨迹及ZMP轨迹。
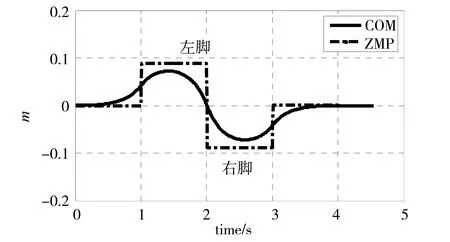
图5 COM及ZMP轨迹规划Fig.5 COM and ZMP trajectory planning
为了更积极的利用稳定裕度,增加实时平衡控制器的性能,令COM轨迹在Y方向有一段静止时间,在双脚支撑阶段令YZMP尽量小,使得YZMP和Ymc轨迹在支撑面重合,由于受支撑面的限制,YZMP为常数,利用如下公式就可以规划出如图6的COM及ZMP轨迹。
(7)
由式(7)解得:
(8)
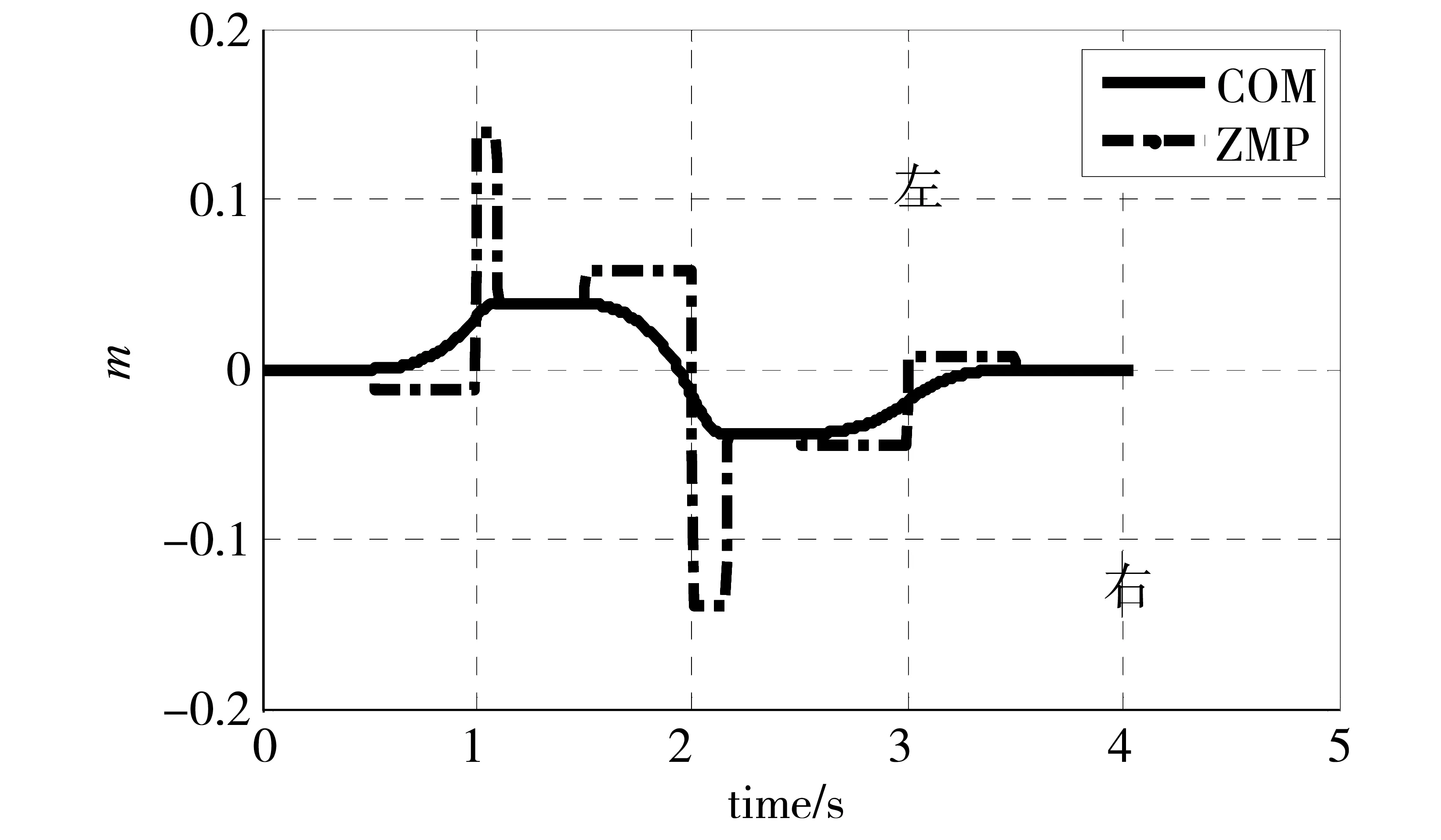
图6 COM及ZMP轨迹规划Fig.6 COM and ZMP trajectory planning
有了COM和ZMP轨迹,则可规划出双脚的轨迹及质心轨迹,再用逆运动学就能求出各关节电机角度,这样就可以让仿人机器人做出行走动作[11-12]。
1.3 HUBO的在线动态步态控制
通过前一节的步态轨迹创建,HUBO机器人已经可以在平坦的室内行走,但是为了HUBO还要能在不平坦的、倾斜的柏油马路及人行道上行走,加上了可以应对各种情况的在线控制器。由于HUBO的在线控制过于复杂,本节在此仅分析其中几种关键控制器[14-16]。
1.3.1 阻尼控制器和ZMP补偿器 阻尼控制器的设计是为了消除单脚支撑阶段的持续震荡。这种震荡主要是由作为柔性运动结构一部分安装在踝关节处的力矩传感器造成的。由于不可避免的ZMP点运动,在单脚支撑时只用阻尼控制器不能有效的维持稳定的动态步行,为了补偿ZMP误差,用盆骨位置作为控制输入,在X方向和Y方向移动盆骨位置补偿纵向和横向上的ZMP误差。ZMP补偿器用的是极点配置的方法,控制框图如图7所示。
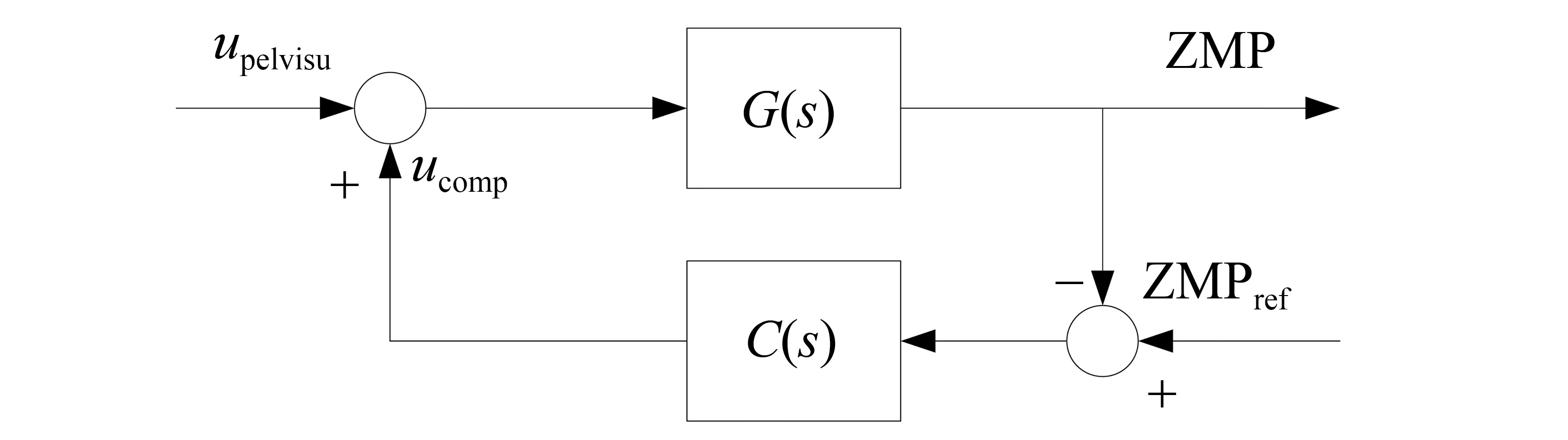
图7 ZMP补偿器Fig.7 ZMP Compensator
其中C(s)是补偿器,G(s)是传递函数,upelvisu和ucomp是盆骨的位置和补偿位置,ZMPref为参考轨迹。ZMP通过ZMP补偿器稳定后,躯干在步行过程中会前后移动和左右移动。
1.3.2 摆动腿的减震控制器 仿人机器人在行走的时候提起来的腿会不可避免的震动,这是因为腿和盆骨间连接的框架会偏转,并且由于减速齿轮是一个小的柔性系统,虽然震动不大,但是它会扰乱脚的着地位置,如果位置控制的精度不在3 mm以内,着地控制器的性能将会受到影响,着地位置误差将会增大,所以摆动腿着地时的减震控制是必要的。
将HUBO的腿部震动简化为如图8的模型,u为腰部的控制输入角,θ为实际角度,m是腿的质心,l是从腰关节到质心的长度,k为腿部的扭转刚度。
此系统的等式可写为:
(9)
传递函数为:
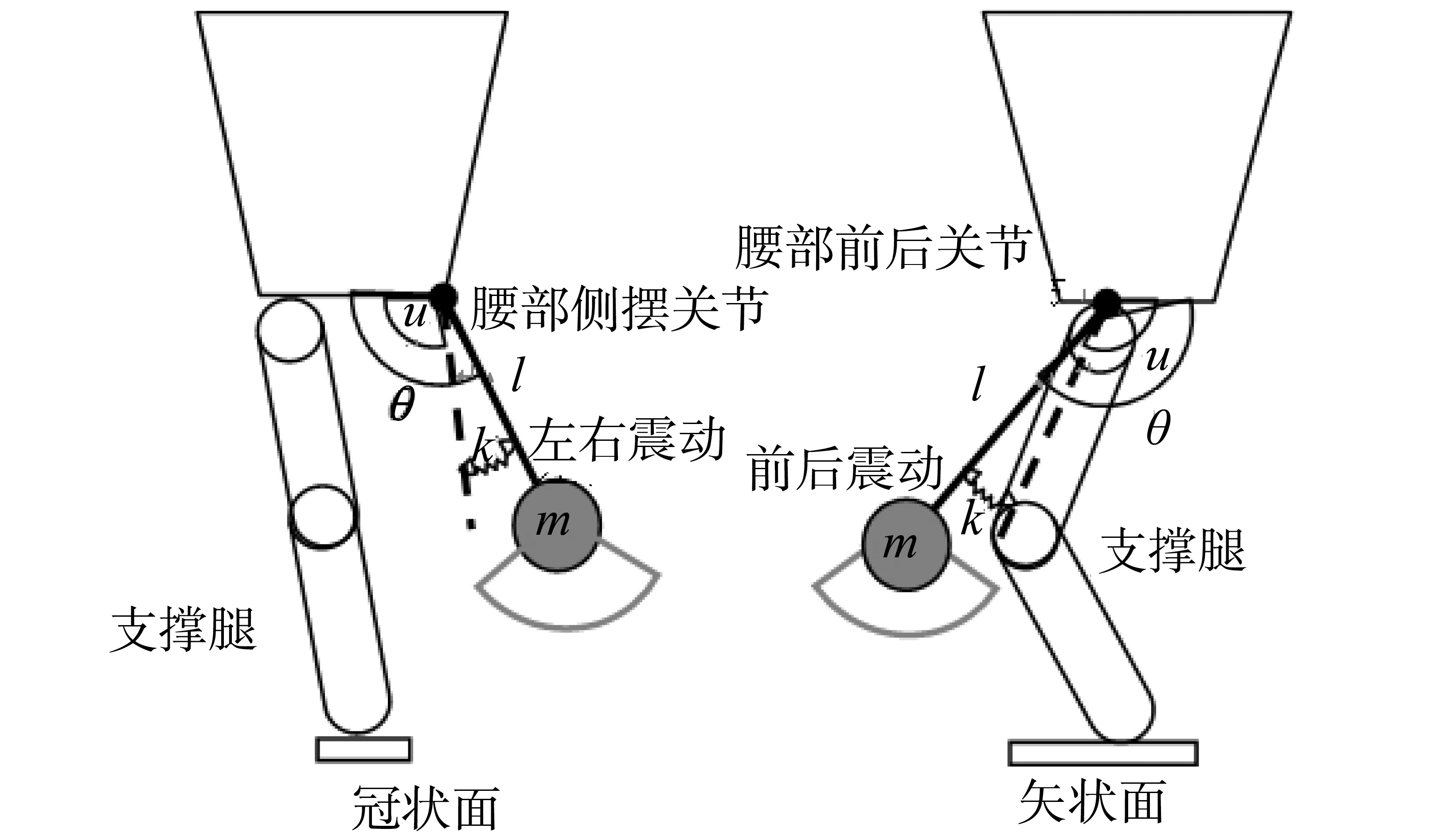
图8 HUBO摆动腿震动模型Fig.8 Swinging foot model of HUBO
(10)
上式传递函数有两个极点分布在拉普拉斯域虚轴上,因此为临界稳定系统。由实验得出确切的传递函数为:
(11)
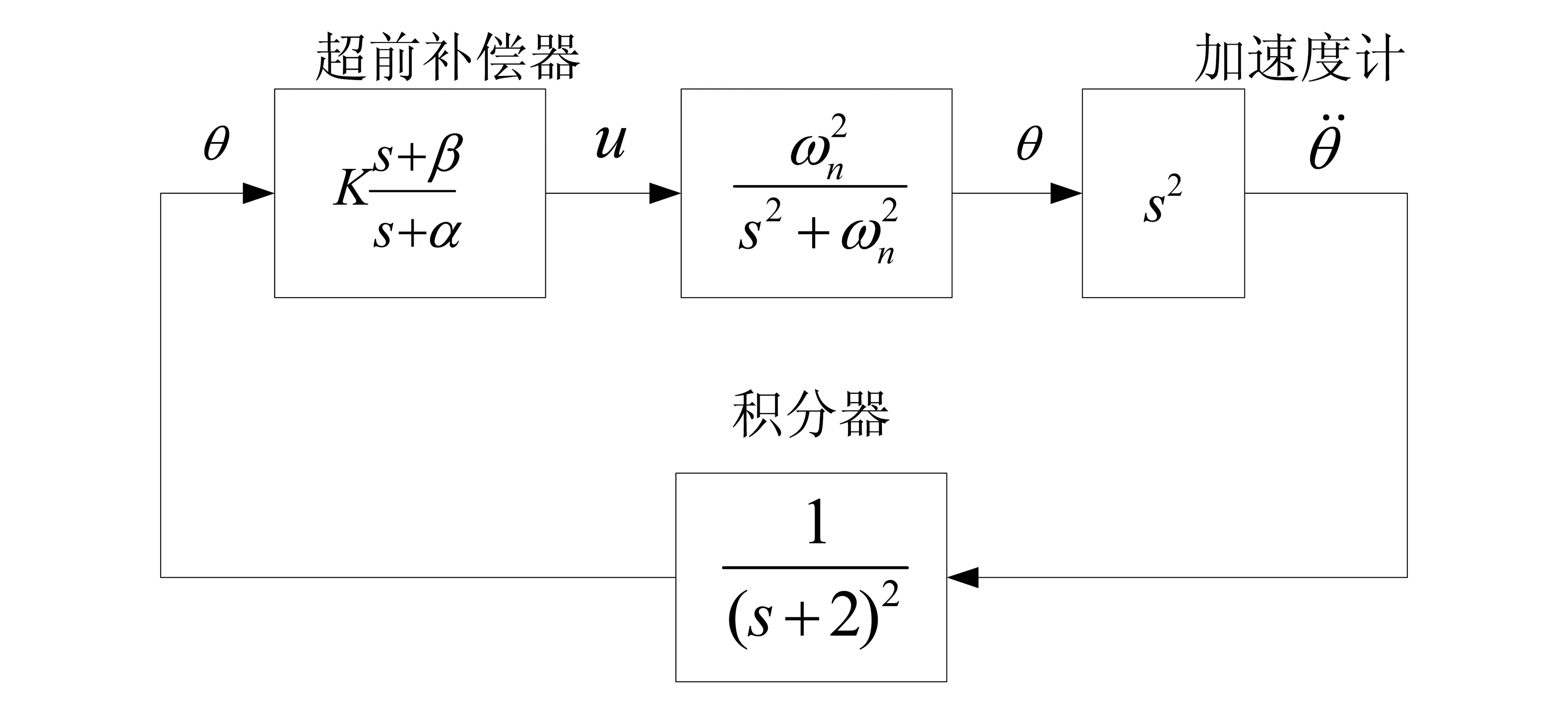
图9 HUBO腿部减震控制器框图Fig.9 Leg vibration controller block diagram of HUBO
除了腿部震动,仿人机器人在行走的过程中,由于不同的负重以及腰部的柔性关节,上身也会产生在横截面内绕Z轴的震动。用于控制上身震动的传感器为装在盆骨中间的速率陀螺仪,可以检测到上身绕Z轴转动的角速度。控制框图设计如图10所示,在此系统中,加入了一个高通滤波器来滤除低频传感器漂移,角度值由滤波后的信号积分得到。

图10 HUBO上身减震控制器框图Fig.10 Body vibration controller block diagram of HUBO
2 对控制器的仿真及改进
目前,关于HUBO控制器的具体实验资料较少,本文就各控制器进行仿真及改进。在不同负载、不同状况下,为了达到最好的步态平衡控制效果,控制器中的参数也会不尽相同[12-13]。本章的仿真设置参数为多次实验后得到的最佳参数。
2.1 摆动腿的减震控制器仿真及改进
本章用Simulink对减震控制器进行仿真及改进。首先生成正弦衰减函数模拟震动过程中衰减的输入角度。机器人脚部震动时的震动频率约为2 Hz,则正弦函数中ω的值约为13,震动幅度设置为30°。

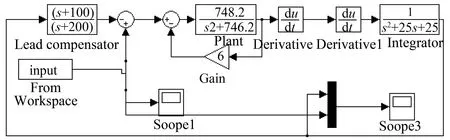
图11 腿部减震控制器控制框图Fig.11 Leg vibration controller block diagram

图12 减震控制器仿真结果Fig.12 Leg vibration controller simulation result
2.2 躯干的减震控制器仿真及改进
躯干的震动输入信号相比腿的略有不同,躯干绕Z轴振幅较小只有1°左右,但是震动频率比腿部要高。通过调节超前补偿器增益改进后的控制框图如下:

图13 躯干减震控制器框图Fig.13 Body vibration controller block diagram
其中,假设机器人上负载较大的情况,包括上身约为80 Kg时得出传递函数的参数,由仿真结果图14可知,当采用躯干减振控制器后振幅大幅减小。

图14 躯干减震控制器仿真结果Fig.14 Body vibration controller simulation result
2.3 使用积分进行自由改进
由于脚底的加速度计对信号有双重微分作用,经过多次输入高频震动的仿真发现,当输入信号有较大高频干扰时,输出信号就会发散得比原震动幅值大很多,这不利于机器人的平衡,对硬件也会有一定损伤。若机器人不用加速度计而用陀螺仪等直接测量角度,不对扰动信号进行微分作用,换成积分控制(如图15),那么在腿部震动的同时受到如图16所示正弦高频正弦扰动时依旧能快速减少腿部震动,回到稳定值,仿真结果如图17所示。
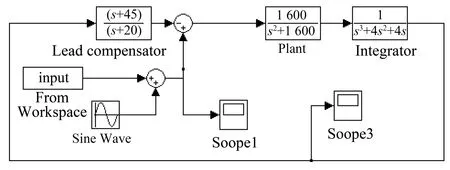
图15 减震控制器自由改进框图Fig.15 Free improvement of vibration controller
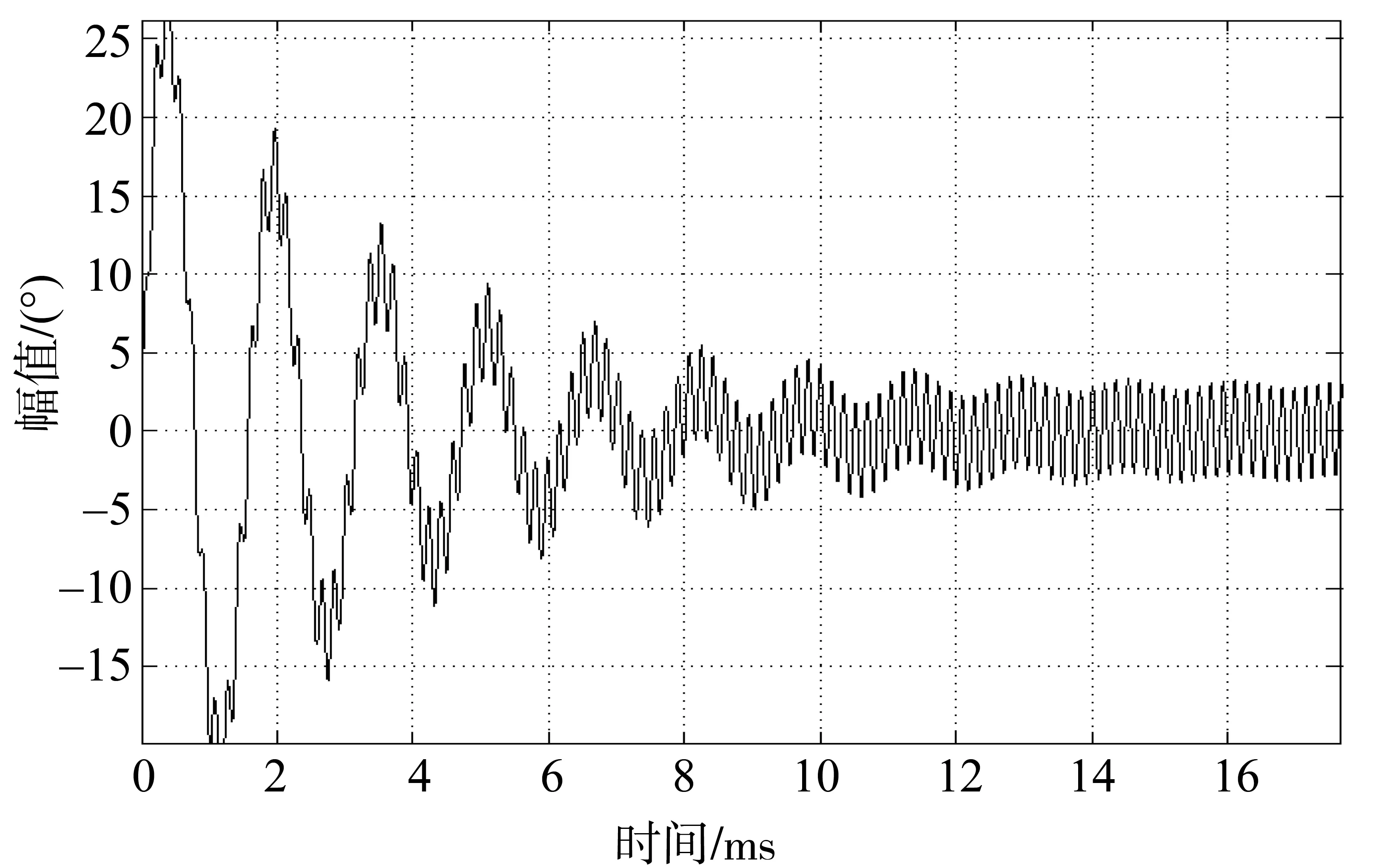
图16 加上正弦扰动的震动输入信号Fig.16 Vibration input with Sine perturbation
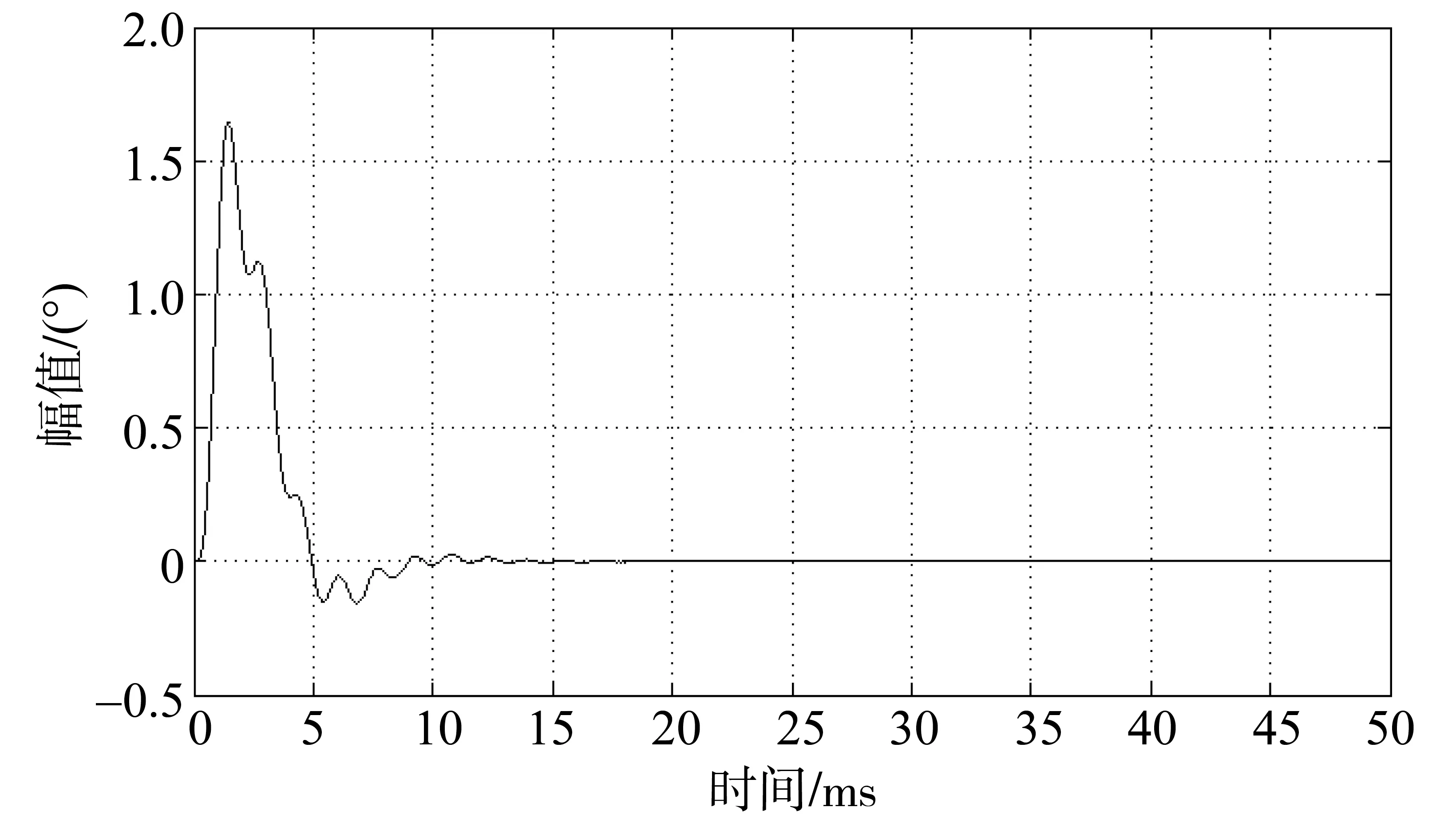
图17 改进后的减震控制器输出Fig.17 Output of improved vibration controller
本节改进了HUBO的一些控制器,提出了一种可以通过输入模拟信号来分别仿真验证及改进HUBO各控制器的方法,由于机器人昂贵且多次实验过程复杂,单独调节各个控制器时就可用Simulink仿真的方法来改进参数,然后再将参数输入到HUBO的程序中验证即可。
3 结 论
本文以智能双足仿人机器人HUBO为研究对象,分析HUBO基于ZMP的步态规划方法以及各个关键控制器的控制方式,确保机器人行走时的平衡控制效果。提出了基于Simulink设置模拟环境的输入,经多次仿真改进服务机器人HUBO平衡控制器的方法,为以后对仿人机器人在服务领域的应用和发展奠定了一定的基础。然而仿人机器人也存在一定的局限性,比如对仿人机器人建立运动解析方程并求解运动轨迹的方法进行全身动作设计难度极大,运动方程建立困难,解析式复杂等。因此要增加仿人机器人步态平衡的稳定性要从机器人的各方面去设计[14-15,17-18]。
[1] 吴俊君, 胡国生. 室内环境仿人机器人快速视觉定位算法[J]. 中山大学学报(自然科学版), 2013, 52(4): 7-13.
[2] 阮晓钢, 仇忠臣, 关佳亮. 双足行走机器人发展现状及展望[J]. 机械工程师, 2008 (2): 17-19.
[3] 龚建伟, 陆际联, 黄文宇. 轮式移动机器人航向跟踪预估控制算法[J]. 机器人, 2001, 23(3): 193-196.
[4] 柯文德, 崔刚, 洪炳镕, 等. 参数化优化的仿人机器人相似性前向倒地研究[J]. 自动化学报, 2011, 37(8): 1006-1013.
[5] 赵晓军, 黄强, 彭朝琴, 等. 基于人体运动的仿人型机器人动作的运动学匹配[J]. 机器人, 2005, 27(4): 358-361.
[6] CHENG L, HOU Z G, TAN M, et al. Tracking control of a closed-chain five-bar robot with two degrees of freedom by integration of an approximation-based approach and mechanical design [J]. IEEE Transactions on Systems Man & Cybernetics Part B Cybernetics, 2012, 42(5): 1470-1479.
[7] VUKOBRATOVIC M, BOROVAC B, SURDILOVIC D. Zero-moment point-proper interpretation and new applications [C]∥Proceedings of the IEEE/RAS International Conference on Humanoid Robots. Piscataway, NJ, USA: IEEE, 2001, 244.
[8] KIM J Y, PARK I W, OH J H. Walking control algorithm of biped humanoid robot on uneven and inclined floor[J]. Journal of Intelligent and Robotic Systems, 2007, 48(4): 457-484.
[9] KIM J Y, PARK I W, OH J H. Experimental realization of dynamic walking of the biped humanoid robot KHR-2 using zero moment point feedback and inertial measurement [J]. Advanced Robotics, 2006, 20(6): 707-736.
[10] PARK I W, KIM J Y, OH J H. Online biped walking pattern generation for humanoid robot khr-3 (kaist humanoid robot-3: Hubo) [C]∥Humanoid Robots, 2006 6th IEEE-RAS International Conference, IEEE, 2006: 398-403.
[11] 朱志斌, 王岩, 陈兴林. 一种双足机器人实时步态规划方法及相关数值算法[J]. 机器人, 2008, 30(6): 521-527.
[12] 夏泽洋, 陈恳, 刘莉, 等. 面向仿人机器人自然步态规划的人体步行实验分析[J]. 机器人, 2008, 30(1): 41-46.
[13] MITOBE K, CAPI G, NASU Y. Control of walking robots based on manipulation of the zero moment point [J]. Robotica, 2000, 18(6): 651-657.
[14] 刘霞, 陈勇. 一类具有多种不确定性机器人系统的自适应控制[J]. 电子科技大学学报, 2015, 44(3):61-66.
[15] 柯文德, 彭志平, 蔡则苏,等. 仿人机器人相似性运动轨迹跟踪控制研究[J]. 自动化学报, 2014, 40(11): 2404-2413.
[16] 张利格, 毕树生, 高金磊. 仿人机器人复杂动作设计中人体运动数据提取及分析方法[J]. 自动化学报, 2010, 36(1):107-112.
[17] 郭丙华, 李中华. 基于障碍物地平角点的移动机器人定位[J]. 中山大学学报(自然科学版), 2013, 52(5): 45-50.
[18] 杨放琼, 谭青, 彭高明. 不确定环境下集矿机环境感知与实时避障研究[J]. 中山大学学报(自然科学版), 2010, 49(4): 58-62.
Balance control of a humanoid service robot
ZHANG Shuang1, WU Yilin2, GE Weiliang3, LAN Kai3
(1. School of Aeronautics and Astronautics, University of Electronic Science and Technology of China, Chengdu 611731, China; 2. Department of Computer Science, Guangdong University of Education, Guangzhou 510310, China; 3. School of Automation and Electrical Engineering, University of Electronic Science and Technology of China, Chengdu 611731, China)
The dynamic characteristics of humanoid robot are complex, coupled and nonlinear. Therefore, the balance control for humanoid robot is significant in research. The research of an intelligent humanoid service robot system is presented. Firstly, the intelligent biped humanoid robot (HUBO) is used as a test platform to analyze its balance system and gait generation based on ZMP algorithm in different situations. The control methods are also analyzed to ensure the walking balance for the HUBO. Then, using Simulink, the balance control performance is verified via simulations. Finally, the system parameters are analyzed through the simulation results to guarantee a better performance for gait balance control.
humanoid robot; balance control; ZMP algorithm; gait planning
10.13471/j.cnki.acta.snus.2016.05.003
2016-05-25
国家自然科学基金资助项目(614303063);中央高校基本科研业务费资助项目(ZYGX2015J120);广东第二师范学院教授博士科研专项经费资助项目(2014ARF25);广东省科技计划资助项目(2016A010106007, 2014A090906010);广东省应用型科技研发专项资金资助项目(2016B090927010)
张爽(1984年生),女;研究方向:系统建模与控制,分布式参数系统,飞行器控制;通讯作者:邬依林;E-mail:lyw@gdei.edu.cn
TP242
A
0529-6579(2016)05-0014-07
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
读友·少年文学(清雅版)(2020年4期)2020-08-24
科学大众(2020年12期)2020-08-13
读友·少年文学(清雅版)(2020年3期)2020-07-24
文萃报·周二版(2020年23期)2020-06-19
电子制作(2018年18期)2018-11-14
科学之谜(2018年4期)2018-09-17
现代装饰(2018年5期)2018-05-26
中国公路(2017年18期)2018-01-23
中国三峡(2017年2期)2017-06-09