弹道式再入飞行器零射程线技术研究
2016-06-05 09:34宋剑爽张艳玲
导弹与航天运载技术 2016年3期
熊 伟,宋剑爽,张艳玲,王 智,丰 海
弹道式再入飞行器零射程线技术研究
熊 伟,宋剑爽,张艳玲,王 智,丰 海
(北京宇航系统工程研究所,北京,100076)
在介绍了零射程线基本概念的基础上,提出了3种常用的零射程线工程算法,并基于其中的迭代方法,采用弹道仿真手段,分析了影响零射程线方向的主要因素,给出了零射程线技术的应用途径,并对零射程线技术后续研究方向进行了展望。
弹道式再入飞行器;零射程线;弹道计算;仿真
0 引 言
对于弹道、制导设计而言,零射程线是一个非常重要的概念,具有广泛的应用价值。所谓零射程线是指当沿该方向对再入飞行器施加速度增量时,不影响再入飞行器的最终落点。
图1为零射程线方向示意,经过推进点A点和目标点的惯性弹道可以有无数条,图中给出其中的2条。其中的弹道1和弹道2在A点的差异仅仅是速度矢量不同,弹道1在A点对应的速度矢量为1,弹道2在A点对应的速度矢量2。
图1 零射程线方向示意
假设弹道1表示的是地面设计好的标准命中弹道,实际飞行时只要在A点给再入飞行器一个速度增量Δ,使再入飞行器在A的速度矢量从1改变为2,此时再入飞行器将沿着弹道2飞行,依然能命中目标点,但是其飞行轨迹(弹道)已经和原来的标准命中弹道(弹道1)截然不同,所需飞行时间、再入弹道倾角、再入速度也和原来弹道不相同。速度增量Δ仅仅改变了再入飞行器的被动段惯性弹道,并没有改变再入飞行器最终落点,因此,Δ的方向就是零射程线方向。对于数值大小相等的速度增量Δ,通常零射程线方向有2个,即图1所示的方向和其反方向。
1 零射程线方向的常用计算方法
目前,零射程线方向可通过解析法[1]、偏导数法[2,3]和迭代法等几种方法进行计算,每种方法都有各自的特点。
1.1 解析法
解析法求解零射程线方向是以椭圆轨道理论为基础,忽略地球摄动、再入段空气阻力影响,利用被动段射程解析解,在轨道平面内求解确保射程不变的速度增量方向。具体求解方法在文献[1]中有详细说明,本文仅给出最终的零射程线方向计算公式:
在不考虑姿态控制偏差的前提下,可得到零射程线方向与发射惯性坐标系a轴方向夹角:
解析法求解零射程线方向,算法简单,计算效率高。但由于该方法没有考虑地球自转的影响,且该解析公式主要是基于一阶泰勒展开推导得到,略去了高阶导数项,存在一定的截断误差,因此其求解精度不是很高。为了得到高精度的零射程线方向解析解,则需要考虑地球自转以及地球形状的影响,同时兼顾高阶项,重新进行数学推导,此过程将非常繁琐复杂,并且得到的解析公式也非常复杂,具有一定的局限性,难以应用于工程实际。
1.2 偏导数法
偏导数法是利用射程对速度的偏导数求解零射程线方向,具体计算过程及原理如下。
射程对速度偏导数可以采用矢量表示为

(4)
零射程线要保证落点相对原落点的纵横向偏差均为零,应满足偏导数与速度增量的点乘结果为零,即:

(6)
采用偏导数法计算零射程线方向,计算精度相对解析法有所提高,但是因需计算射程对3个方向速度的偏导数,需计算3条弹道,计算量有所增加。
1.3 迭代法
迭代法是基于弹道迭代[4]的思想,通过选取合适的迭代算法进行零射程线方向的求取。在再入飞行器飞行过程中,速度增量引起的射程变化与速度增量的方向有关。图2描述了对再入飞行器在主动段结束后继续飞行100 s时施加某个固定的速度增量引起的射程变化随速度增量作用方向(箭体轴向方向,对于质点弹道还指俯仰程序角方向)的变化关系。若不施加该速度增量,再入飞行器的名义射程为1 209 km。从图2中可看出,再入飞行器射程(射程减去1 209 km即为落点偏差)随速度增量作用方向变化曲线为单峰曲线,且规律性很好。因此可以以速度增量作用方向为变量,以落点偏差为零作为目标进行牛顿迭代,通过迭代能够得到精度很高的零射程线方向,但该方法需进行多次数值积分弹道计算[5],计算效率较低。
图2 射程随速度增量方向(俯仰程序角)变化曲线
解析法、偏导数法和迭代法3种方法都能够得到零射程线方向,但其精度和计算效率不同。为确保计算精度和效率都满足要求,工程上可以将解析法与迭代法结合起来,以解析法得到的方向作为初值进行迭代,既能保证解算精度又能够提高迭代的效率,以下进行弹道仿真计算分析时均采用该迭代方法来求解零射程线方向。
2 零射程线方向的主要影响要素分析
零射程线方向的主要影响要素有以下3点:
a)与再入飞行器所处的位置以及速度有关。
根据第1.1节讲述的近似解析公式,零射程线方向与再入飞行器所处的位置以及速度直接相关。即对于1条已经确定的弹道,当再入飞行器处于该弹道的不同位置时,其零射程线的方向也是不同的。图3为再入飞行器按典型惯性弹道(即400 km射程对应的惯性弹道和1 200 km射程对应的惯性弹道)飞行时,在主动段关机后,零射程线方向随飞行时间(计时零点为主动段关机点)的变化曲线。从图3中可以看出,零射程线方向与飞行时间有近似的线性关系。
图3 零射程线方向随飞行时间变化曲线
b)与再入飞行器的射程以及射向有关。
图4描述了再入飞行器进行典型惯性弹道飞行时,在不同射程、不同射向条件下零射程线方向随射向变化规律。从图4可以看出,在再入飞行器产品参数和射程确定的情况下,零射程线方向随射向变化规律近似为正/余弦关系,规律性较好,有利于快速迭代收敛。
图4 不同射程零射程线方向随射向变化曲线
c)与地球形状及引力场、再入气动力有关。
如第1节所述,零射程线方向的计算精度取决于再入飞行器质心运动弹道计算模型的精确程度。由于再入飞行器飞行全过程始终受到地球引力的影响,且在再入飞行段受到气动力的作用,地球形状及引力场、再入气动力这些影响质心运动的要素必然对零射程线方向计算精度存在一定的影响。经过数值仿真分析,地球扰动引力及再入气动力这两大要素对弹道式再入飞行器理论落点航程的影响约为数百米至数公里,不是主要影响因素,因此其对零射程线的计算精度影响有限,这也验证了在采用解析法推导零射程线方向时忽略地球摄动、再入段空气阻力影响的合理性。
3 姿态控制系统对零射程线技术应用的影响
射程随速度增量作用方向变化曲线为单峰曲线(见图2),若该曲线严格连续且单调,则基于该曲线的零射程线方向迭代(牛顿迭代)能快速、高精度获得,并对迭代初值不敏感;反之,如果该曲线单调连续性不好或者局部较差,则会影响零射程线的迭代速度及精度。在质点弹道设计时,不需要考虑姿态控制系统对质心运动的影响,且认为不存在姿态控制偏差,可严格控制速度增量作用方向与零射程线方向保持一致,此时图2的单峰曲线具有较好的单调连续性。
再入飞行器实际飞行中,姿态控制系统通常存在一定的姿态控制偏差,通过设计飞行程序角将速度增量作用方向严格对准零射程线方向的难度大幅增加,图2的单峰曲线局部单调连续性将变差。
图5为考虑姿态控制系统实际作用过程的刚体弹道计算模型下,单峰曲线(射程与俯仰程序角关系曲线)在零射程线方向(对应的俯仰程序角约-78°)附近的局部规律。从图5可知,该曲线在局部有较多毛刺或锯齿,非严格的单调连续。该毛刺或锯齿的幅值在几十米到公里级。此时采用牛顿迭代法去迭代零射程线方向对应的俯仰程序角时,所使用的迭代步长不宜过小,否则将会使得迭代反复震荡而无法收敛到期望的精度范围。
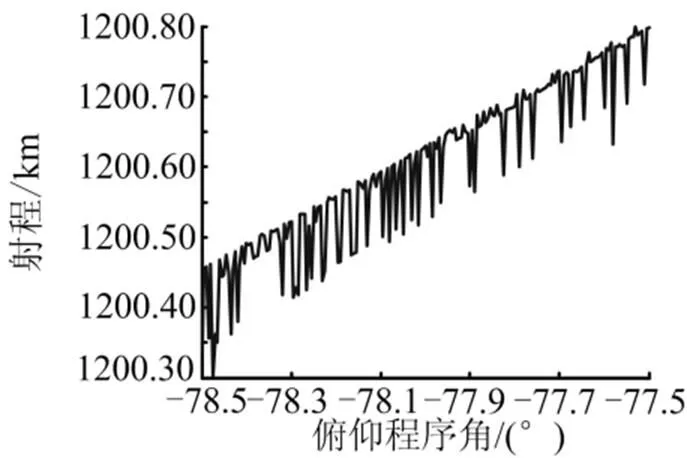
图5 刚体弹道射程(纵向落点偏差)随俯仰程序角变化局部关系
为进一步说明姿态控制系统控制精度对零射程线技术应用(即设计对应的飞行程序角)的影响,通过假设姿态控制系统姿态控制精度依次取无偏差、0.1°跟踪系统差、0.4°跟踪系统差3种情况进行刚体弹道仿真计算验证,仿真计算结果如图6~8所示。

图6 姿控系统无姿态跟踪偏差时射程与俯仰程序角方向关系
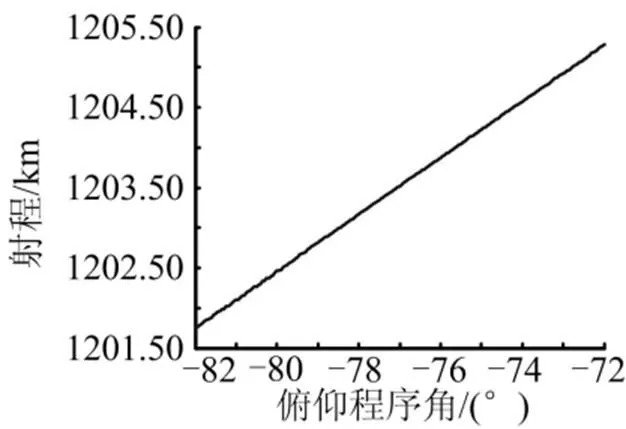
图7 姿控系统始终存在+0.1°姿态跟踪偏差时射程与俯仰程序角方向关系
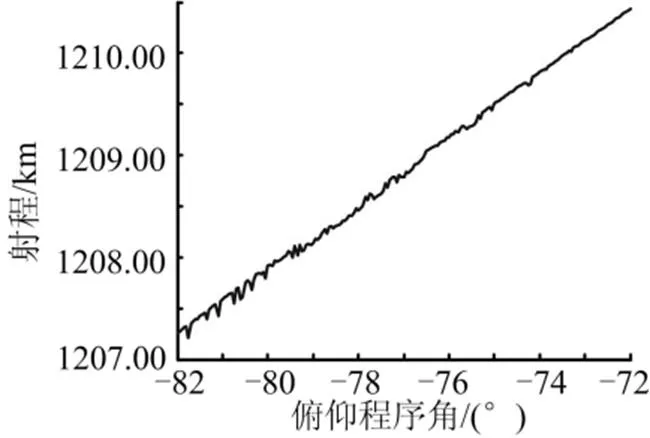
图8 姿控系统始终存在+0.4°姿态跟踪偏差时射程与俯仰程序角方向关系
由图6~8可知,姿态控制系统控制精度越差,造成的锯齿毛刺幅值越大,单峰曲线不连续单调区间段越多。通常姿控系统在工程实现时不可能完全没有姿态跟踪偏差,因此,对于刚体弹道的单峰曲线会出现一定幅度的毛刺,迭代求解零射程线方向对应的飞行程序角时,会出现反复震荡难以收敛的情况,此时迭代步长要适当增大,进行变步长迭代。
4 零射程线技术的应用
零射程线的概念提出较早,其工程应用也越来越广泛,主要包括:
a)固体再入飞行器主动段的制导。为了尽可能提高最大射程,固体再入飞行器主动飞行段普遍采用耗尽关机方式以取消推力终止系统[6]。此时,对于最大射程以外的其它射程情况,再入飞行器主动段的能量有富余,如果主动段状态满足关机条件但发动机燃料尚未耗尽,可以将再入飞行器姿态调整到零射程线方向,直至发动机完全关机[3],以消耗完多余的发动机能量。
b)末修级标准程序设计。通常再入飞行器为了提高落点精度,需要采用液体末修级来修正实际飞行时主动段的弹道偏差。然而在设计标准弹道时不考虑飞行过程中的干扰或偏差,且末修级标准程序设计时往往有最小推进剂消耗的要求,在这种情况下,末修级标准程序应沿零射程线方向[2]。
c)多再入飞行器协同落入同一区域的弹道设计。在多再入飞行器协同飞行并需要落入同一区域的情况下,再入飞行器母舱可在不同飞行时刻沿零射程线方向进行多个再入飞行器的抛撒释放,既可避免不同再入飞行器间潜在的相互碰撞摧毁的可能性,还可确保所有协同飞行的再入飞行器均落入到同一区域。
d)最优再入机动能量方向求解。对于具备在飞行中段进行主动机动的再入飞行器,将推力按最优再入机动能量方向作用可使再入机动能力最大化,最大程度地节省燃料,控制再入飞行器的整体规模。而最优再入机动能量方向与零射程线方向通常具有垂直关系,因此通过求解零射程线方向来间接获得最优再入机动能量方向。
e)末级舱体处理。通常末级舱体在将再入飞行器释放完成后,需要进行舱体处理,使其与再入飞行器拉开一定的距离,不干扰地面对再入飞行器的测量效果,同时舱体残骸能落到指定的安全区域内,不造成人员伤亡或财产损失。末级舱体处理时沿零射程线推进,直至推进剂耗尽是一个比较好的舱体处理方案,该方案既可避免重新选择新的落区,也可通过改变弹道形状将再入飞行器与末级舱体在空间拉开一定的距离而不影响地面测量。
5 结束语
本文对零射程线的原理进行了简单阐述,给出了3种常用的工程计算方法,并采用弹道数学仿真手段分析了影响零射程线方向的主要因素,提出了零射程线技术的应用方向,为实际的工程应用提供了一定的技术基础。后续可针对考虑地球旋转条件下,深入开展零射程线方向的快速、高精度解析方法研究[7],以解决零射程线计算效率与计算精度的矛盾,满足实际的工程任务需求。此外,通过神经网络等模型代理的方法来快速构建零射程线方向与其主要影响因素之间的非线性映射关系,进而提高零射程线方向求解精度也是重要的研究方向。
[1] 陈磊. 战术弹道导弹中段多弹头进攻方法的研究[J]. 航天控制, 2000(2): 1-4, 11.
[2] 郑伟. 弹道导弹零射程线及其应用[J]. 飞行力学地球物理摄动因素对远程弹道导弹命中精度的影响分析及补偿方法研究, 2008, 26(4): 73-76.
[3] 马瑞萍. 一种基于零射程线的闭路制导方法[J]. 弹箭与制导学报, 2010, 3(5): 43-46.
[4] 马丹山. 弹道导弹的标准弹道迭代方法研究[J]. 飞行力学, 2007, 25(4): 48-49.
[5] 贾沛然. 远程火箭弹道学[M]. 长沙: 国防科技大学出版社, 1994.
[6] 廖洪昌, 陈奇昌, 王明海. 耗尽关机闭路制导导引方法研究[J]. 弹道与制导学报, 2006, 27(2): 35-38.
[7] 郑伟. 地球物理摄动因素对远程弹道导弹命中精度的影响分析及补偿方法研究[D]. 长沙: 国防科技大学, 2006.
Research on Zero-Range Orientation and Applications of Ballistic Reentry Vehicles
Xiong Wei, Song Jian-shuang, Zhang Yan-ling, Wang Zhi, Feng Hai
(Beijing Institute of Aerospace Systems Engineering, Beijing, 100076)
On the basis of introducing the basic concept of zero-range orientation, three commonly used engineering algorithms were proposed. Aiming at the iteration algorithm, the main factors affecting the zero-range orientation by the trajectory simulation was analyzed, and applying field of zero-range orientation was put forward.
Ballistic reentry vehicles; Zero-range orientation; Trajectory calculation; Simulation
1004-7182(2016)03-0001-04
10.7654/j.issn.1004-7182.20160301
V412
A
2015-03-02;
2015-07-22
熊 伟(1981-),男,工程师,主要研究方向为轨道设计
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
中学生数理化·高一版(2021年2期)2021-03-19
数字海洋与水下攻防(2020年5期)2021-01-04
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2016年9期)2016-11-16
制导与引信(2016年3期)2016-03-20
北京航空航天大学学报(2016年3期)2016-02-27
北京航空航天大学学报(2016年3期)2016-02-27
现代电子技术(2015年1期)2015-04-13
环球时报(2012-02-23)2012-02-23