
基于旋回机动的潜艇艉升降舵卡挽回仿真研究*
2016-06-21 09:33刘常波
舰船电子工程 2016年5期
胡 坤 刘常波 孙 奎
(海军潜艇学院 青岛 266042)
基于旋回机动的潜艇艉升降舵卡挽回仿真研究*
胡坤刘常波孙奎
(海军潜艇学院青岛266042)
摘要艉升降舵卡下潜舵是潜艇最危险的一种舵卡形式,根据潜艇水下旋回机动产生的耦合水动力及其引起的潜浮运动特性,推导出不同航速条件下利用潜艇旋回机动可挽回的艉升降舵卡下潜舵舵角的计算方法,并通过六自由度潜艇运动仿真与控制研究平台对计算结果进行了仿真验证,仿真结果表明在一定航速范围内采用操方向舵旋回机动对于挽回艉升降舵卡下潜舵产生的首倾下潜趋势具有显著效果,从而验证了论文提出的计算方法的有效性。
关键词潜艇; 旋回; 升降舵; 仿真
Class NumberTG156
1引言
升降舵是潜艇水下航行垂直面运动的最主要也是最常用的操纵装置。在潜艇航行过程中,由于液压失灵或操纵错误、碰撞、机械故障和水中武器爆炸震动等原因,都会引起舵卡故障。此时潜艇易失去垂直面的操纵性。一旦升降舵尤其是艉升降舵被卡住,潜艇极容易形成危险纵倾而失去控制。在这种紧急情况下,为了确保潜艇安全、及时恢复操纵性,应及时采取有效措施进行应急操纵[1~2]。
潜艇升降舵卡时所采用的操纵措施主要是降速和均衡,有些文献资料也介绍了艉升降舵卡下潜舵时可采取旋回的方法作为辅助操纵措施,但只是定性地要求方向舵打满舵,对操方向舵进行旋回机动挽回的具体效果未做详细研究。本文在潜艇六自由度运动模型的基础上,采用公式推导和计算机仿真相结合的方法对潜艇艉升降舵卡下潜舵后操方向舵挽回的原理进行分析和计算,通过仿真验证,得出结论:当潜艇水下航行艉升降舵卡下潜舵时,在一定航速范围内操方向舵进行旋回机动不失为一种有效的辅助操纵手段[3~4]。
2潜艇垂直面运动方程
潜艇升降舵卡后主要关心的是潜艇垂直面的深度和纵倾变化,考虑潜艇的垂直面非线性运动方程[5~7]:

mu+wq)= u+Xuuu2+Xwww2 +Xwqwq+Xδsδsδ2s +Xδbδbδ2b+XT+Pθmw-uq)= Z0+w+q+Zww +Z|w||w|+Zqq+Zw|w|w|w| +Zwww2+Zw|q|w|q| +Zq|q|q|q|+Zδsδs+Zδbδb +Z|q|δs|q|δs+PIq= M0+w+q+Mww +M|w||w|+Mqq+Mw|w|w|w| +Mwww2+Mw|q|w|q|+Mq|q|q|q| +Mδsδs+Mδbδb+M|q|δs|q|δs +XTZT+MP+Mθθq=dθdt=θ·ìîíïïïïïïïïïïïïïïïïïïïïïïïï
(1)
本文的坐标系、名词术语和符号规则均采用国际水池会议(ITTC)推荐和造船与轮机工程学会(SNAME)术语公报的体系。

3潜艇艉升降舵卡时的运动特性仿真
以式(1)为仿真模型,采用C#语言编制潜艇垂直面操纵运动仿真平台,图1~图4给出了低速(6kn)和高速(18kn)条件下艉升降舵分别卡下潜舵5°和上浮舵5°舵角时潜艇的纵倾角、横倾角、潜深和垂速随时间的变化曲线。
从仿真结果可以看出:
1) 艉升降舵卡下潜舵时,相当于在潜艇艉部施加了一个向上的力,并产生一个首倾力矩,潜艇在这个力矩的作用下作首倾下潜运动。
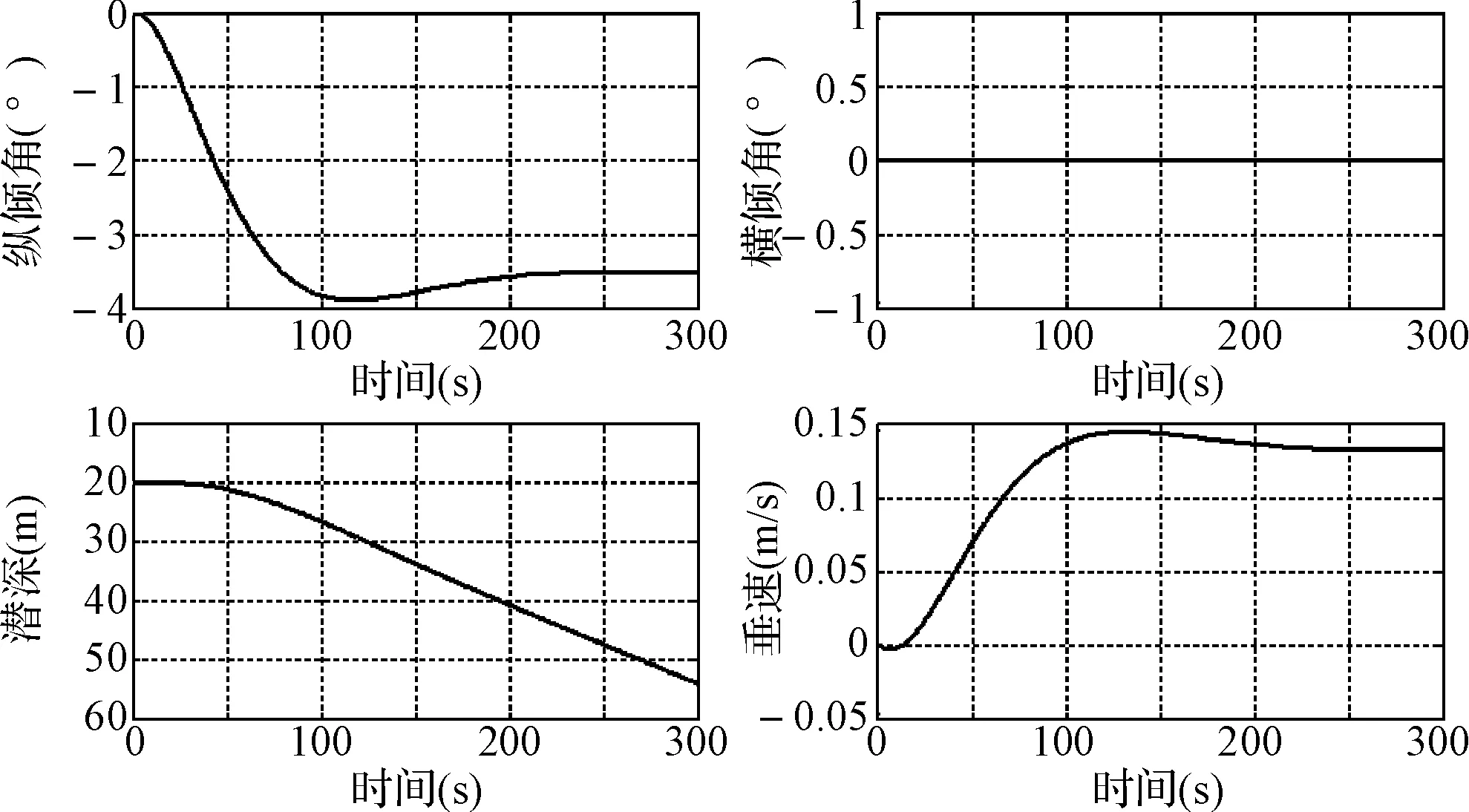
图1 航速6kn,艉升降舵卡下潜舵5°
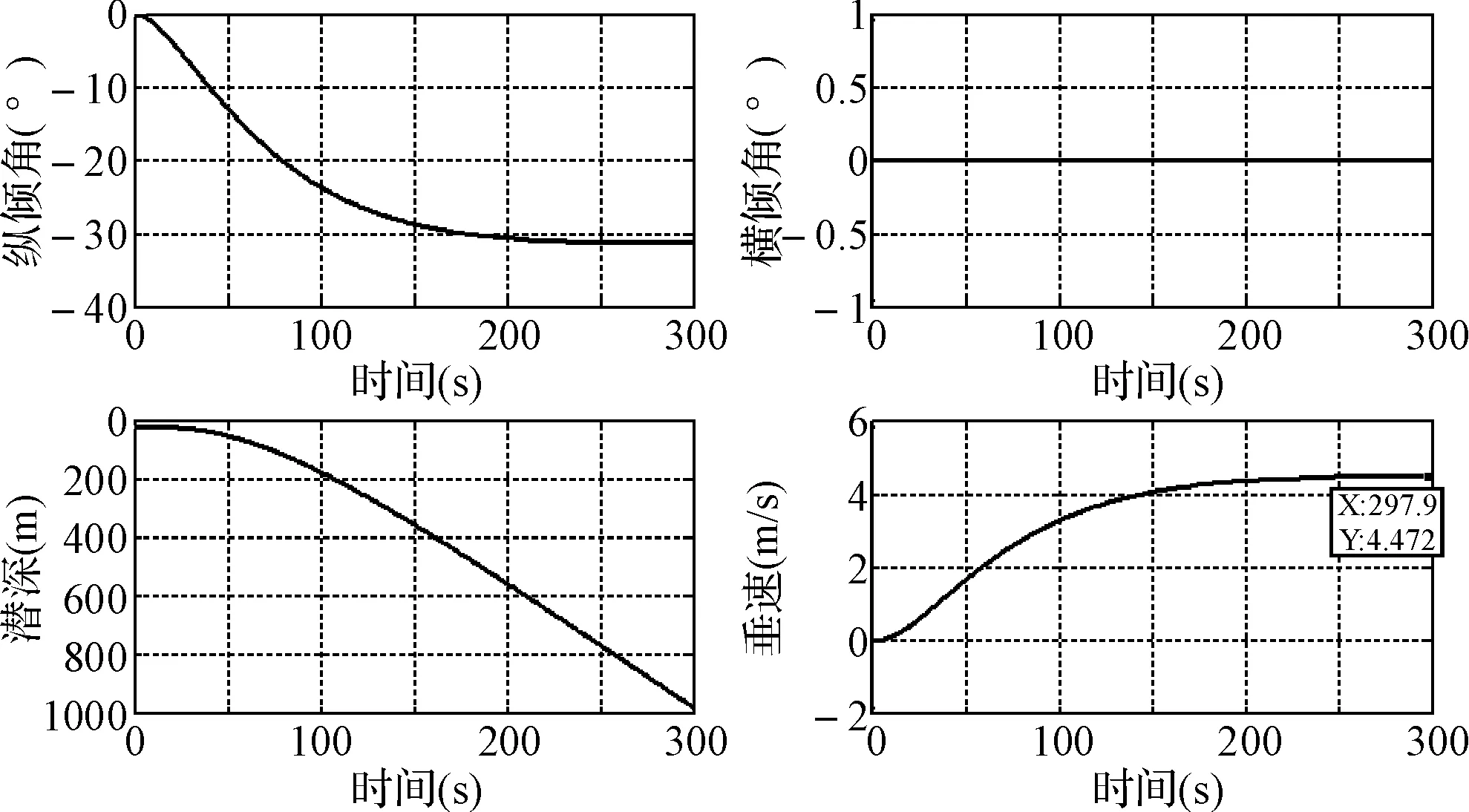
图2 航速18kn,艉升降舵卡下潜舵5°
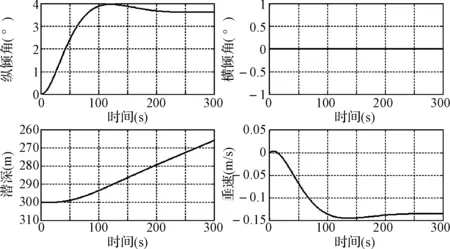
图3 航速6kn,艉升降舵卡上浮舵5°

图4 航速18kn,艉升降舵卡上浮舵5°
2) 艉升降舵卡上浮舵时,相当于在潜艇艉部施加了一个向下的力,并产生一个尾倾力矩,潜艇在这个力矩的作用下作尾倾上浮运动。
3) 艉升降舵卡后,若不采取积极有效的措施,潜艇将会在舵卡产生的力和力矩的作用下改变深度和纵倾,并且航速越高,艉舵卡相同舵角时潜艇产生的纵倾角和升速越大,说明航速越高升降舵卡带来的危害越大。
4旋回运动对潜艇垂直面运动影响
当潜艇在水下旋回时,由于产生了旋回角速度和横向速度,也由于主艇体周围的流场与指挥室围壳周围的流场存在相互干扰,使指挥室围壳前后方、主艇体的顶部和底部的流场发生改变,出现侧洗流,导致围壳前后和主艇体上下部位产生速度差,根据伯努利定律,会产生上下、前后的压力差,这样就会在围壳后部产生一个向下的垂向力并由此产生抬首力矩[1]。
潜艇在该耦合水动力和力矩的作用下,将产生纵倾角和冲角,这又产生了扶正力矩和有冲角水动力(力矩),于是可写出旋回引起的直线潜浮运动的平衡方程:
(2)
由式(2)可解出θ、α,进而可进一步解得潜浮角:
(3)
由于旋回产生的下沉力作用点一般在水动力作用点之后,根据操纵性理论,水下旋回时的纵倾总是抬首的[3]。对于旋回时是下潜还是上浮,则要由潜浮点的位置决定。同样由操纵性理论可知,当潜艇以大于某一速度Vr的速度旋回时将尾倾上浮,反之则尾倾下潜。这个速度称为转向逆速,其计算公式如下:
(4)
式中:m′为潜艇水下全排水量;g为重力加速度;h为稳心高[11]。
潜艇以大于转向逆速的速度旋回时,会产生尾倾上浮的趋势,可以在某种程度上抵消艉升降舵卡下潜舵时造成的首倾下潜趋势,因此可以利用潜艇旋回机动这种力学特性来挽回艉升降舵卡下潜舵时的首倾下潜趋势。
5旋回机动挽回尾舵卡下潜舵计算与仿真
对于艉升降舵卡下潜舵的情况,假设舵卡前潜艇进行了良好的均衡,在以一定航速旋回挽回舵卡时,使潜艇定深并带一定纵倾,则可按定深旋回时的尾舵角和纵倾角,由有纵倾等速定深直线运动平衡方程确定,即:
(5)

由水平面回转运动引起的垂直面的下沉力和尾倾力矩的无因次方程,可以写为
(6)
由方程(5)推导可得:
(7)

潜艇操方向舵作旋回机动时时,通过六自由度方程可解得潜艇的横向速度v和旋回角速度r,再由式(6)、式(7),并代入相关水动力系数可解得当前航速下可挽回的艉升降舵卡的舵角。
以模型潜艇为研究对象,采用式(7)计算了操方向舵满舵进行旋回机动可挽回的艉升降舵卡下潜舵的最大舵角,并运用海军潜艇学院研制的六自由度潜艇运动仿真与控制研究平台对计算结果进行仿真验证,如图5所示。同时得到潜艇在不同航速条件下操方向舵满舵挽回相应尾舵卡角的深度变化曲线,如图6所示。
图5 旋回机动可挽回尾舵卡角度
从仿真结果可以看出,潜艇航速大于转向逆速2kn且小于5.7kn时,当发生艉升降舵卡下潜舵时,只通过旋回机动就可成功地挽回深度和纵倾,因此可以得出结论:一定的航速区间内,若发生艉升降舵卡下潜舵故障,不采取其他措施而仅仅操方向舵是可以挽回潜艇的下潜趋势的。而当航速大于5.7kn时,计算结果与仿真验证结果出现较大误差,单靠旋回机动已难以挽回纵倾和深度。分析其原因,笔者认为是由于高航速使升降舵的舵力和舵力矩急剧增大,旋回产生的尾倾力矩难以与舵力矩保持平衡,从而使潜艇的首纵倾和深度增大。因此,潜艇在中、高航速航行发生升降舵舵卡时,应立即综合采取各种有效措施,比如降速、注排水、调水等来挽回深度和纵倾。
图6 旋回机动挽回尾舵卡的深度变化
6结语
舵卡是潜艇发生频率比较高的一类故障,应该指出传统的挽回措施仍是十分有效的,尤其是高速卡大舵角时,降速和均衡仍是处理舵卡的主要操纵措施,但低速时发生升降舵卡,如果处置不当也会对潜艇操纵性构成严重威胁。因此,根据潜艇的旋回特性,利用潜艇旋回也不失为一种良好的辅助措施。本文以艉升降舵卡为例,对潜艇通过旋回来挽回艉升降舵卡下潜舵进行了理论上的计算分析,推导出了操方向舵挽回的艉升降舵卡的舵角公式,得出了方向舵的挽回效果。得出的结论对操艇人员针对潜艇发生艉升降舵卡时的处置具有一定的借鉴意义。
参 考 文 献
[1] 施生达.潜艇操纵性[M].北京:国防工业出版社,1995.
[2] 吴秀恒,刘祖源,施生达.船舶操纵性[M]. 北京:国防工业出版社, 2005.
[3] 徐亦凡.潜艇操纵原理与方法[M].北京:兵器工业出版社,2002.
[4] 王燕飞,张振山,张萌. 鱼雷无人平台初始设计阶段操纵性能预报[J]. 舰船科学技术, 2006,28(4):61-63.
[5] 胡坤,于德新.潜艇垂直面操纵运动模型误差仿真分析[J].计算机仿真, 2012(5):10-13.
[6] 刘鹰,赵琳.潜艇仿真数学模型的推导求解[J]. 哈尔滨工程大学学报,1999,20(2):26-33.
[7] Gertler M. Hagen R. Standard Equations of Motion for Submarine Simulation[M]. AD-653861, SNAME, 1967.
[8] 李麓,李维嘉.潜艇水下六自由度仿真数学模型[J].计算机仿真,2001(5): 33-38.
[9] 李光磊,周永余.一种面向控制的潜艇运动模型的简化及仿真[J].船海工程,2008(6):17-21.
[10] 徐亦凡,胡坤,刘常波.潜艇在海洋密度锋中受扰运动建模与仿真研究[J].船海工程,2012(2):47-52.
Simulation of Retrieving Stern Rudder-jamming Based on Submarine Cycle Movement
HU KunLIU ChangboSUN Kui
(Navy Submarine Academy, Qingdao266042)
AbstractThe stern rudder-jamming during diving is one of the most dangerous rudder-jamming. According to the coupling hydrodynamic and the diving motion characteristics by the submarine cycle movement, the computing method of the rudder angle retrieved by the submarine cycle movement in the case of the stern rudder-jamming is deducted. And through the six-degree-of-freedom submarine movement simulation and the control research platform the result is verified. The simulation results show that the effect of operating course rudder to retrieve stern rudder-jamming in the scope of speed is very significant. And it verifies the effectiveness of computing method.
Key Wordssubmarine, cycle movement, stern rudder, simulation
* 收稿日期:2015年11月9日,修回日期:2015年12月26日
作者简介:胡坤,男,博士,讲师,研究方向:潜艇操纵性与武器系统仿真与实验技术。
中图分类号TG156
DOI:10.3969/j.issn.1672-9730.2016.05.022
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2021年6期)2021-11-02
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21
