基于图论的变形移动机器人姿态变换策略
2016-06-21 07:02山东科技大学
电子世界 2016年11期
关键词:图论
山东科技大学 吕 鹏 刘 浩
基于图论的变形移动机器人姿态变换策略
山东科技大学 吕 鹏 刘 浩
【摘要】针对很多地形复杂的应用场合,变形移动机器人[1]的研究越来越多,但目前针对其姿态变形问题仍没有一种常规有效的方法来实现,本文采用图论方法来实现变形移动机器人姿态的变换。通过实际实验验证了该算法可以有效的解决变形移动机器人的姿态变换问题。
【关键词】变形移动机器人;姿态变换;图论
0 前言
目前,移动机器人在所有机器人的研究中占有举足轻重的地位,而使其适应大多数复杂地面环境又是移动机器人研究中的一大挑战,尤其是室外移动机器人,比如排爆机器人,对复杂环境的适应能力就是其一个技术指标。
本文研究的移动变形机器人方案示意图如图1所示。该移动机器人有四条履带。

图1 结构原理
每条履带都通过一加长臂和两个关节和机器人主体相联。通过它们,每一条履带都可以实现任意角度或方向的伸展、折叠或旋转。通过这些履带、关节和加长臂的不同的组合方式,就可以获得机器人不同的移动姿态和移动方式,以适应不同地面情况的运动。
1 图论算法
将变形移动机器人各个姿态作为图的顶点,姿态之间的变换作为路径,那么任意姿态之间的变换就变成了图论中的最短路径的求解问题。
1.1 姿态变换图的确立
1.1.1 建立图顶点与姿态的对应关系表
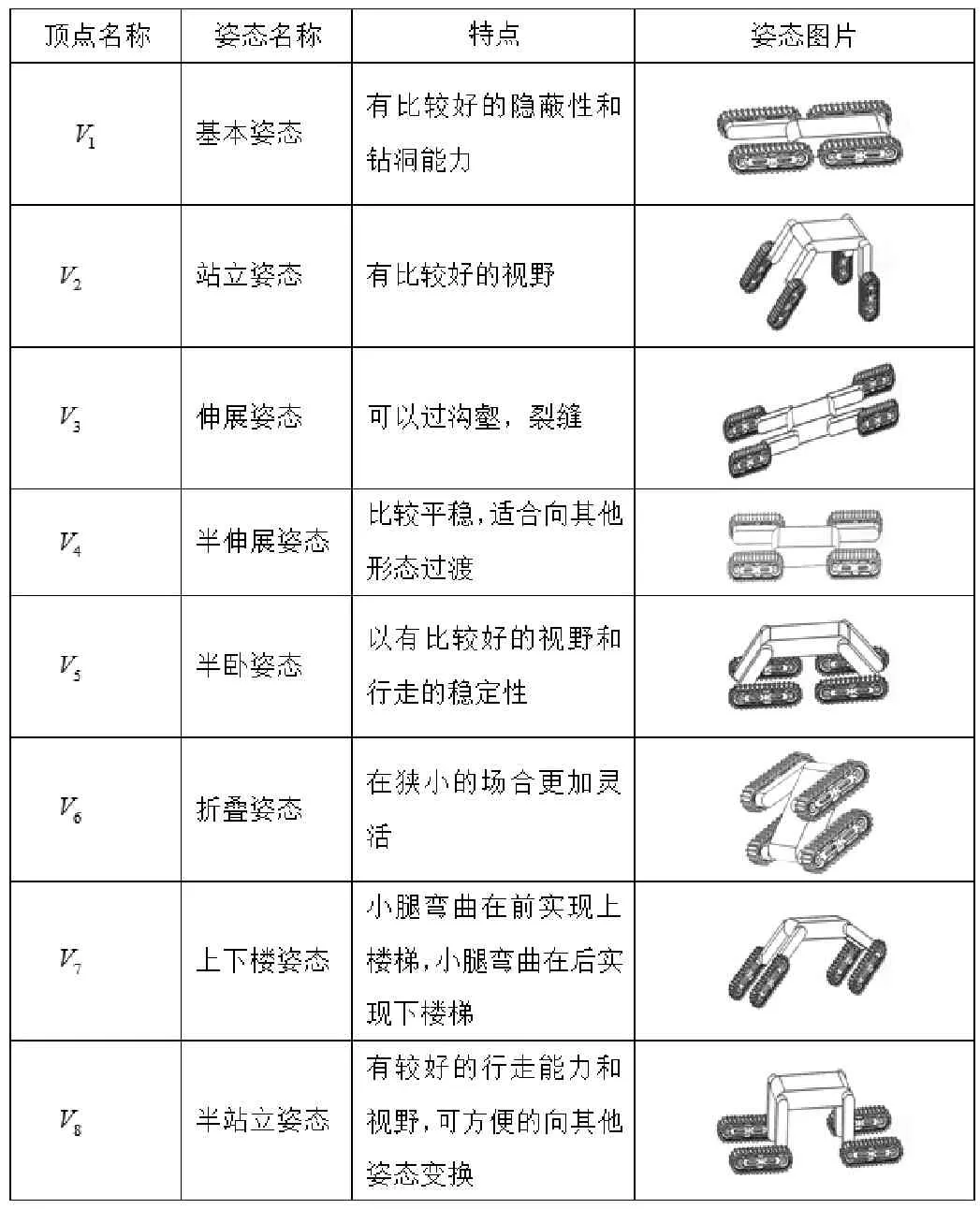
表1 顶点与姿态关系表
由表1可见,同时考虑布线可以得出,有些姿态之间的变换相对容易,有些姿态之间的变换相对复杂,或者说需要通过另一些姿态作为中间过程,那么,假定要实现姿态A到姿态B之间的变换,就需要获取从姿态A到姿态B最简单的变换方式,也就是说要电机的转动幅度要小,同时保证重心的偏移要小,从而达到机器人姿态变换的速度快,同时具有整个机身稳定的效果。
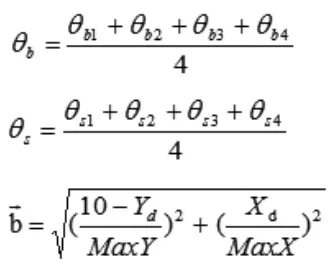
1.1.2 确定权值

同理,小腿关节平均运动角度为:

再然后根据经验确定各变量在权值中所占的比重,最后为了使计算机可以准确快速的处理数据,故将计算出的权值放大100倍,使其处于合理的整数范围内。
从而可以确定权值计算公式:

其中:
通过编写计算工具,可得到所有的权值,如图2所示:
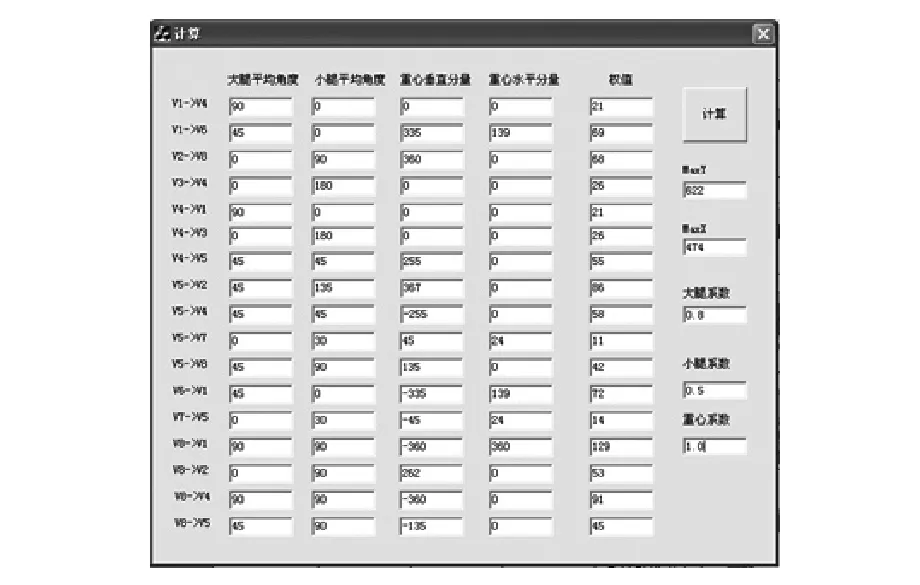
图2 权值计算
1.1.3 建立姿态变换图及其矩阵
基于以上考虑,建立整个姿态变换图,如图3所示:
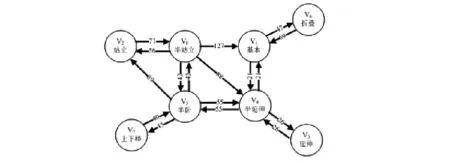
图3 姿态变换图
由上图建立变换复杂度矩阵如下:
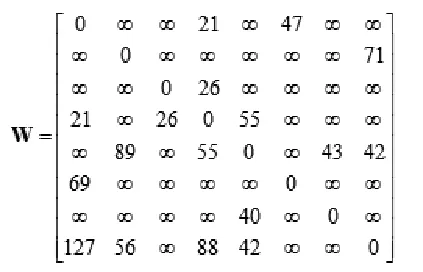
1.2 应用Dijkstra算法求解

(1)初始化顶点,将顶点与姿态变化函数关联,建立如下结构体:
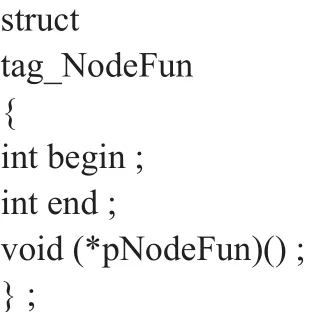
其中,begin表示起始顶点,end表示结束顶点,pNodeFun指向由姿态begin到姿态end的变换函数。
(3)从V-S集合中,选取姿态变换最佳的姿态即顶点Va,并将顶点Va加入到S中。


(5)若S集合同V集合相等,则已找到最佳变换方式,否则返回第(2)步。
(6)调用姿态变换函数执行姿态变换。
具体程序流程图如图3所示:
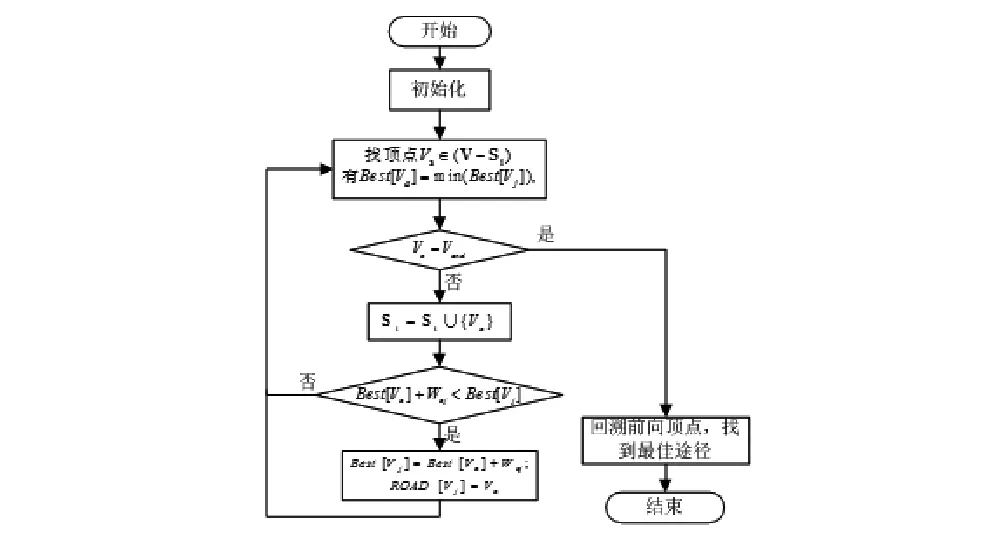
图3 程序流程图
2 实验
2.1 仿真实验
为了验证上面的算法,在PC机上进行仿真,假设从V1(顶点0)到V5(顶点4),输出结果如图4所示:

图4 输出结果图
可以看出由顶点0到顶点1,权值之和为162,变换的姿态顺序为V1(0)->V4(3)->V5(4)->V2(1),而其他的变换的权值都会大于162,比如变换V1(0)->V4(3)->V5(4)->V8(7)->V2(1)的权值之和为171。调用的姿态变换函数分别为one_four(),four_five()以及five_two(),从而可以实现整个姿态的变换。
2.2 具体实验仿真
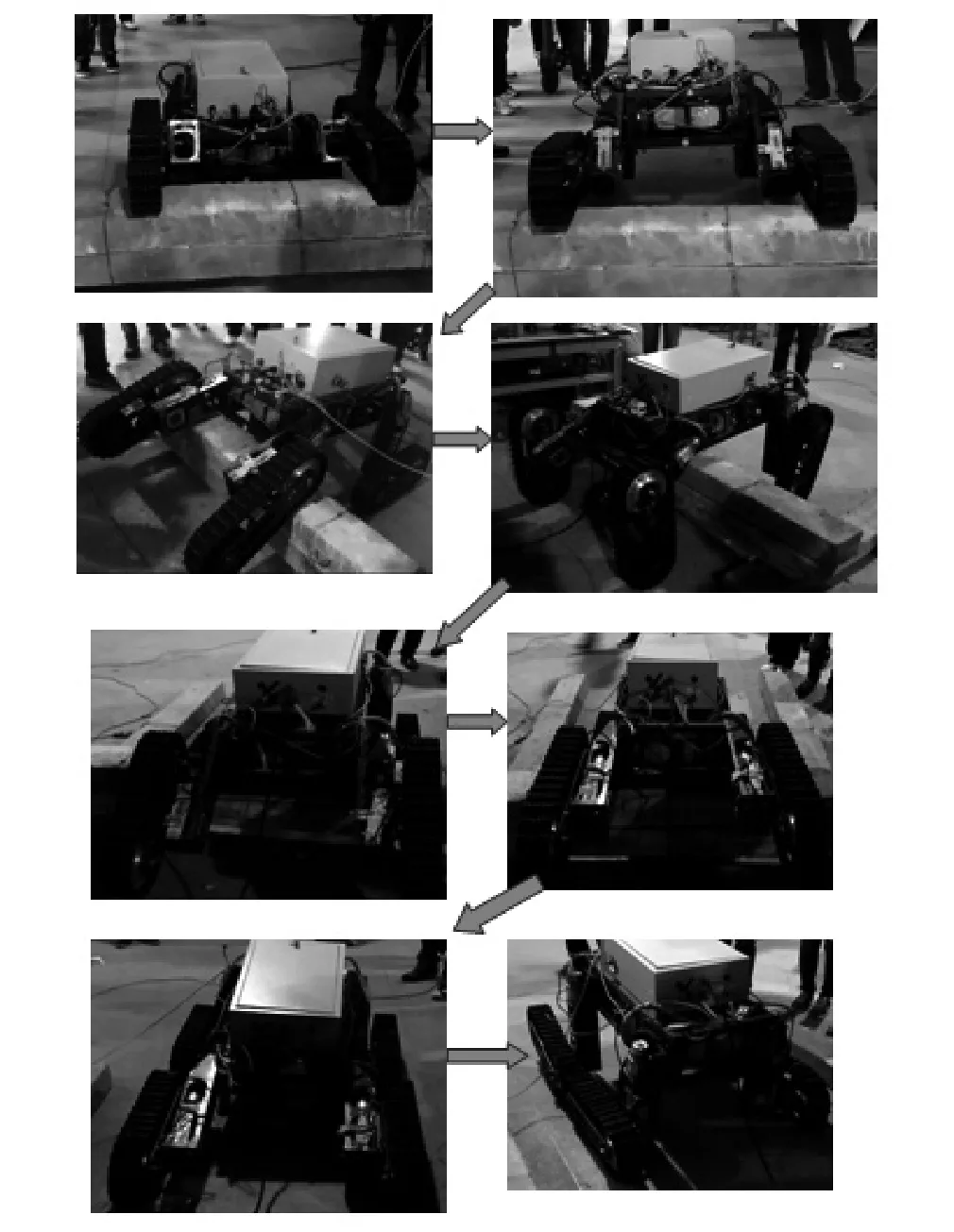
图5 实验仿真图
3 结论
本文利用图论方法实现了变形移动机器人的姿态变换,通过实验证明的此方法可以有效的解决姿态变换最优问题,并且实现简单,具有很好的实用价值。
参考文献
[1]张卫锋,樊炳辉等.新型变形移动机器人结构设计和分析[J].现代机械,2006(5)∶6-67.
[2]熊有伦.机器人学[M].北京∶机械工业出版社,1993∶54-55.
[3]马金猛,李小凡等.地面移动机器人越障动力学建模与分析[J].机器人,2008(3)∶ 273-278.
[4]范路桥,姚锡凡等.排爆机器人的研究现状及其关键技术[J].机床与液压,2008(6)∶139-143.
作者简介:
吕鹏(1990—),男,山东临沂人,硕士研究生,主要从事机器人技术的研究。
猜你喜欢
铁道通信信号(2020年12期)2020-03-29
中等数学(2018年9期)2018-11-10
知识文库(2018年12期)2018-09-06
数学学习与研究(2017年5期)2017-03-29
数学学习与研究(2017年3期)2017-03-09
电脑知识与技术(2016年18期)2016-11-02
孙子研究(2016年4期)2016-10-20
电脑知识与技术(2016年11期)2016-06-17
电脑知识与技术(2016年12期)2016-06-14