计算机视觉在并联机器人运动学标定中的应用
2016-06-27 06:39董旭明李志斌
自动化仪表 2016年5期
董旭明 李志斌
(中国人民解放军61251部队1,河北 秦皇岛 066102;深圳职业技术学院机电工程学院2,广东 深圳 518055)
计算机视觉在并联机器人运动学标定中的应用
董旭明1李志斌2
(中国人民解放军61251部队1,河北 秦皇岛066102;深圳职业技术学院机电工程学院2,广东 深圳518055)
摘要:为提高并联机器人运行精度,研究利用计算机视觉标定并联机器人运动学参数的方法。首先对Delta型三自由度并联机器人进行运动学分析。然后采用光学照相机为传感器,在机构处于不同位姿状态下对固定于动平台上的标定板进行拍照,通过相机标定以及相应的坐标变换方法,求出动平台中心在基坐标系中的位置。最后利用机器人逆运动学模型、自定义的误差方程和非线性最小二乘估计,获得运动学参数。实验结果表明,该标定方法成本较低,标定方法简单、有效。
关键词:并联机器人传感器执行器运动学标定计算机视觉最小二乘估计逆运动学
0引言
并联机器人具有多条运动支链,这种结构特点使得并联机器人具有刚性大、负载能力强、无误差累积等优点[1]。但同时,由于运动支链中大量连杆的使用以及被动关节的存在,很难通过一般的测量手段得出高精度的机器人机构运动学参数。因此,需要通过运动学标定来获取[2]。基于并联机构的运动学模型,通过测量末端执行器的空间位置,计算出主动关节的输入值;根据主动关节测量值和计算值的误差,利用最小二乘估计可辨识出运动学参数。这种方法实用性强,而且成本不高。
随着计算机视觉技术的发展,以工业相机作为空间位置信息采集装置的方法得到了越来越广泛的应用。这种方法在不使用其他任何传感器的情况下,就可以实现对并联机器人在整个工作空间内位置信息的捕获,且不受机构构型的限制。同时,可以准确获取动平台的当前位姿,从而基于逆运动学模型得出主动关节的计算值[3-4]。本文讨论利用工业相机作为传感器来获取并联机器人末端执行器空间位置信息,通过建立基于并联机器人逆运动学模型的误差方程,进行非线性最小二乘估计,以实现机器人的运动学参数标定。
1三自由度Delta并联机器人运动学分析
1.1样机介绍
Delta并联机器人是Clavel R于1985年提出的[5],目前已经广泛应用于电子、食品及医药等行业的高速拾放操作。Delta机构整体结构简单、紧凑,其3条运动支链具有相同的结构,都由主动臂和从动臂组成。主动臂的驱动部分按120°角均匀分布于定平台;从动臂和动平台由轻质材料制成,使得该机器人具有良好的运动学和动力学特性。其中,从动臂平行四边形结构的应用消除了运动平台的转动自由度,使得Delta机器人能在运动空间中作三自由度的纯平动运动。若在定平台和动平台中心增加一条可自由伸缩的杆件连接,即可实现三平动一转动的运动形式。
本文以自行研制的Delta并联机器人样机为实验对象。该样机仅能实现三自由度的纯平动运动,其驱动部分采用伺服电机+减速器组合,从动臂由轻质碳素材料制作,使得机器人具有很好的运动性能,能达到较快的速度和加速度。为进一步提高该并联机器人的控制精度,需要获得精确的运动学参数,为此需对其进行运动学标定。
1.2运动学分析
并联机器人的逆运动学求解一般比正运动学求解容易,因此在进行并联机器人运动学标定时,通常是采用基于逆运动学模型的标定。为方便进行逆运动学求解,采用含有一条支链的Delta机器人并联机构,其简图如图1所示。
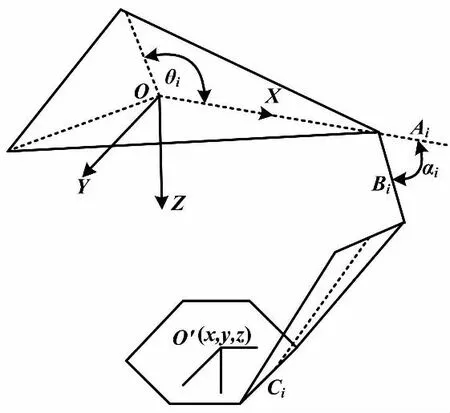
图1 含有一条支链的Delta并联机构简图
设定基坐标系O-XYZ的原点O与定平台中心重合,3条主动臂在XY平面上以O点为中心的分布角i(i=1,2,3)依次为0°、120°和240°,Z轴方向为重力加速度方向。动平台中心O′在基坐标系中的坐标为(x,y,z)。
图1中各符号参数及长度定义如表1所示。
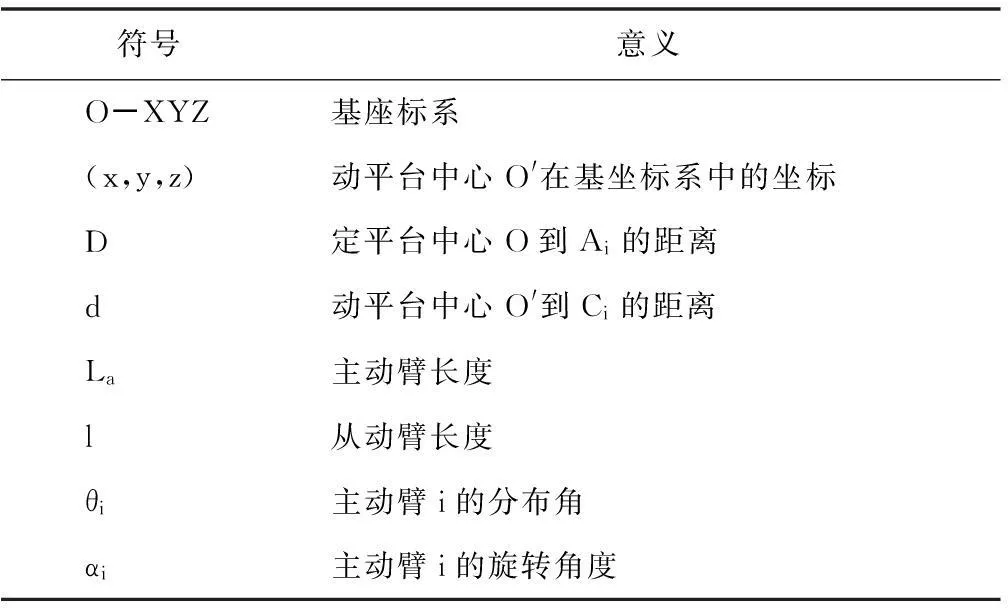
表1 坐标系中各参数及长度定义
由并联机构坐标系中各部分几何关系和从动臂杆长‖BiCi‖=l(i=1,2,3),可以得到如下机构约束方程:
(x-xi)2+(y-yi)2+(z-zi)2=l2
(1)
式中:xi=(D-d+Lacosαi)cosθi;yi=(D-d+Lacosαi)sinθi;zi=Lasinαi
逆运动学求解即为已知动平台中心坐标(x,y,z),求3个主动臂输入角αi。联立上述3个约束方程,化简得到3个以αi为未知变量的二次方程:
(2)
式(2)最多可以求出8组实数解,根据实际的机械装配情况可分析得出一组解,主动臂输入角αi为:
(3)
2基于计算机视觉的运动学标定方法
利用工业相机作为传感器,获取并联机器人末端执行器的空间位置信息。将相机固定在定平台中的某个位置,则相机在基座标系上的空间位置bTc固定。标定物固定在机器人动平台上,则其相对于动平台的空间位置eTt为固定值。通过相机测量,可以获得标定物相对于相机坐标系的空间位置信息cTt。这样,通过坐标映射得到机器人动平台相对于基座标系的空间位置的表达式为:
bTe=bTccTttTe
(4)
定义各空间位置变换矩阵为:
式中:R为动平台相对基座标系的旋转矩阵,理论上R应为单位阵;P为动平台相对基座标系的平移,即动平台的空间坐标(x,y,z)T;Rc为相机坐标系相对基座标系的旋转矩阵,为3×3正交矩阵;tc为相机坐标系相对基座标系的平移矢量,为3×1向量;Rt为标定物相对相机坐标系的旋转矩阵,为3×3正交矩阵;tt为标定物相对相机坐标系的平移矢量,为3×1向量;Re为动平台相对标定物的旋转矩阵,为3×3正交矩阵;te为动平台相对标定物坐标系的平移矢量,为3×1向量;OT为零向量,即OT=[000]。
由此可以得到式(4)的详细表达式为:
从上式可以获得动平台相对基座标系的空间位置为:
(5)
标定物相对相机坐标系的位置矩阵中Rt和tt为相机的外参数矩阵,可由相机标定给出。除此之外,由式(5)可知,动平台的空间坐标P只与剩下的引入参数Rc、tc、te有关,故可以确定需要辨识的引入参数的最小子集pe为:
Pe:(Rc,tc,te)
(6)

p:{La,l,D-d,θ,θ2,θ3,α10,α20,α30}
(7)
即主动臂输入角计算值αi可表述为引入参数pe和机构参数p的函数形式:
(8)
相应地,Delta机构的逆运动学方程应由式(2)修正为:
(9)
(10)

利用Matlab软件提供的优化工具箱,求解耗散方程的非线性最小二乘解,就可以估计出机器人的机构参数p和引入参数pe。

(11)
3标定实验
3.1图像采集
在运动学标定图像采集时,将相机固定在动平台上,尽量使相机视场覆盖整个机器人工作空间。标定物为一7×9黑白相间平板,固定于动平台上,以避免在动平台移动时产生标定物相对于动平台的位置移动。本文的标定方法及试验过程可参考文献[6]。
通过控制机器人主动臂的输入转角,使机器人动平台到达工作空间内的不同位置。通过电机编码器,记录相应位置的主动臂输入角测量值,同时用相机对标定物进行拍照,获得标定物的图像。

3.2参数估计
为了使参数辨识计算过程收敛得更快,参数辨识得更准确,需要在标定前通过测量的方法获得这些待估机构参数的近似值作为初始设定值。结合上述60组数据记录,以及机构参数的初步测量结果,通过优化工具箱的计算,本文的Delta机器人的机构参数的设定值和标定结果如表2所示。
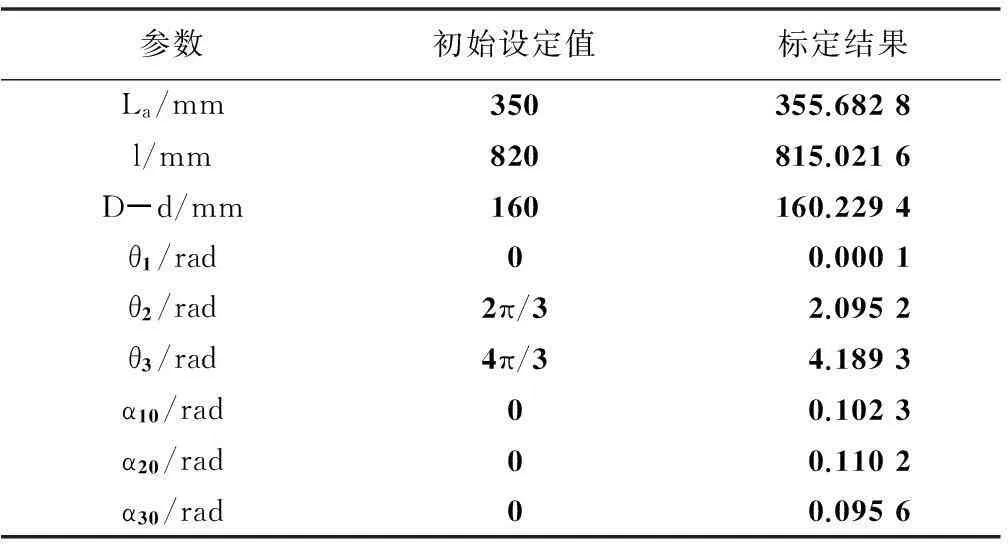
表2 标定结果
3.3结果检验
为验证标定结果,我们将表2所标定的机构参数作为其实际参数,设定要将动平台控制移动到高度分别为600 mm、700 mm、800 mm和900 mm的4个水平面内4个不同位置,在每一个位置拍照记录,通过图像分析得出这16个位置上标定物相对相机坐标系的位置。将这16组测量的位置坐标差值与设定的16组位置坐标差值进行比较,得到标定误差如表3所示。
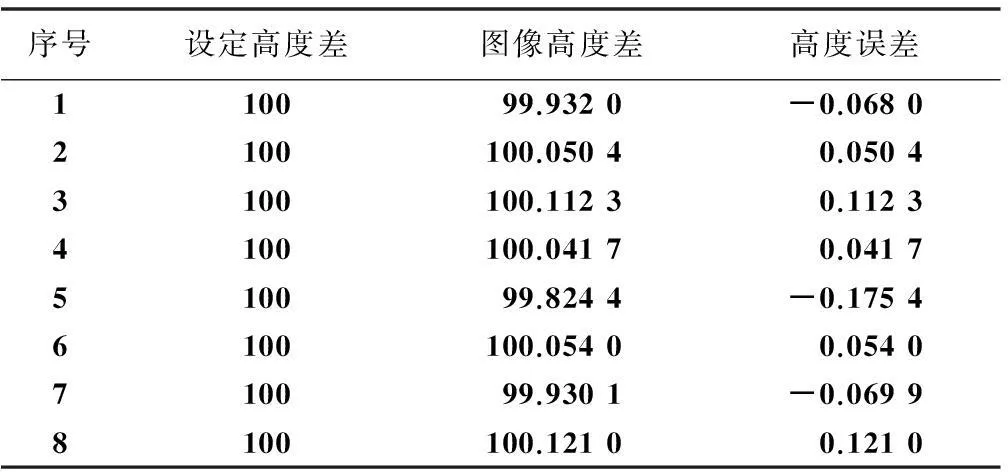
表3 标定误差分析
从表3得到的误差数据可以看出,进行运动学标定后,上述试验的最大误差为0.175 4 mm,均方差为0.075 1 mm。该标定方法具有较高的机构运动精度。
4结束语
采用计算机视觉手段获取并联机器人动平台在全工作空间的位置信息,通过机器人的逆运动学模型,推导出主动臂输入角的计算值;将此计算值与借助编码器等传感器测量的主动臂输入角进行误差比较,建立基于并联机构参数的误差函数,进而求解非线性最小二乘问题,辨识出了Delta机器人的运动学参数。试验验证证明,该运动学标定方法简单、可行,并且成本较低。需要指出的是,借助于计算机视觉的标定方法,标定的参数精度取决于工业相机的测量精度;同时,如果尽可能多地考虑影响运行精度的机构参数,建立含更多参数的运动学模型,只需通过相机拍摄足够多的机构在不同位置上的图像,就可实现更为精确的运动学标定。
参考文献
[1] Merlet J P.Parallel Robots[M].2nd edition.Springer,Netherlands:2006.
[2] Hernandez E E,Lopez C S,Jauregui J C.Calibration of parallel manipulators and their application to Machine Tools,A state of the art surey[J].Engineering Research and Technology,2010,6(2):141-154.
[3] Lou Yunjiang,Chen Tieniu,Wu Yuanqing,et al.Computer vision based calibration of the purely translational orthopod manipulator[C]//In Proceedings of the IEEE International Conference on Information and Automation,2009.
[4] Renaud P,Andreff N,Lavest J M,et al.Simplifying the kinematic calibration of parallel mechanism using vision-based metrology[J].IEEE Transactions on Robotics and Automation,2006,22(1):12-21.
[5] Clavel R.DELTA:a fast robot with parallel geometry[C]//18th International Symposium on Industry Robot,Sydney,Australia,1988:91-100.
[6] 董旭明.三自由度纯平动并联机器人关键技术研究[D].哈尔滨:哈尔滨工业大学,2010.
Application of the Computer Vision in Kinematic Calibration of Parallel Robot
Abstract:In order to improve the running accuracy of parallel robot,the method of using computer vision to calibrate kinematics parameters of parallel robot is researched.Firstly,kinematics analysis of Delta type parallel robot Sensor with three degrees of freedom is conducted.Then,using optical camera as the sensor,the calibration plate fixed on the moving platform is photographed under different state of pose,and the position of the center of moving platform in the base coordinate system is figured out through the camera calibration and the corresponding coordinate transformation method.Finally,using robot inverse kinematics model,customized error equation,and nonlinear least squares estimation,the kinematics parameters are obtained.The experiments verify calibration method is low cost,and its calibration is simplicity and effectiveness.
Keywords:Parallel robotSensorActuatorKinematic calibrationComputer visionLeast square estimationInverse kinematics
中图分类号:TH7;TP242
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201605005
广东省自然科学基金资助项目(编号:S2012040008044)。
修改稿收到日期:2015-09-29。
第一作者董旭明(1981-),男,2010年毕业于哈尔滨工业大学控制科学与工程专业,获硕士学位,工程师;主要从事机电装备自动化应用方向的研究工作。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
汽车维修与保养(2020年11期)2020-06-09
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
电子制作(2019年23期)2019-02-23
制造技术与机床(2018年11期)2018-11-23
消费导刊(2018年8期)2018-05-25
中国惯性技术学报(2017年1期)2017-06-09