
四轮独立驱动电动汽车直线行驶稳定协调控制
2016-07-15 03:48黄锡超
重庆理工大学学报(自然科学) 2016年6期
黄锡超,江 洪,徐 兴
(江苏大学 a.汽车与交通工程学院;b.机械工程学院,江苏 镇江 212013)
四轮独立驱动电动汽车直线行驶稳定协调控制
黄锡超a,江洪b,徐兴a
(江苏大学a.汽车与交通工程学院;b.机械工程学院,江苏 镇江212013)
摘要:为降低两侧车轮垂直载荷转移和附着系数互异路面对四轮毂电机独立驱动电动汽车直线行驶稳定性的影响,通过分析直线行驶失稳跑偏的原因,设计了一种四轮独立驱动协调控制系统。该系统由滑模变结构控制计算纠正跑偏所需的附加横摆力矩,再结合电机驱动的原理和车轮滑转状态,协调分配轮毂电机产生附加横摆力矩或进行车轮防滑控制所需电压调节值。使用Matlab/Simulink建立了14自由度整车模型进行干扰工况的仿真控制,与驱动平均分配及无控制下车辆出现的直线行驶跑偏情况相比,表明协调控制使车辆横摆角速度在(0±0.05°)/s内,较好地提高了车辆直线行驶的稳定性。
关键词:轮毂电机;四轮独立驱动;滑模;协调控制;直线稳定性
四轮独立驱动电动汽车四轮间不存在差速器等机械连接,车轮直接由电机驱动,具有传动效率高、各驱动轮毂电机可独立控制且响应迅速等优势[1],打破了传统车辆直线行驶失稳时轮间驱动力不可单独调节的限制,但也产生了新的多电机间驱动协调控制的问题。文献[2-3]分析了两侧车轮驱动力矩差异与车辆直线行驶稳定性的关系。文献[4-5]研究了电机稳态和动态误差对四轮独立驱动电动车直线行驶的影响。文献[6-8]对车辆进入防滑工况产生的非期望横摆力矩与横摆角速度等问题进行了研究。目前有关直线行驶稳定性的研究基本针对单一干扰工况,且忽略了电机驱动原理,采用理想转矩控制分配。本文通过分析四轮独立驱动汽车直线行驶跑偏的原因和过程,以横摆角速度为被控变量,设计了保证车辆直线稳定行驶和防止车轮过度滑转的四轮独立驱动电动汽车协调控制系统,并以两侧车轮垂直载荷转移和附着系数互异路面工况验证了所设计的协调控制系统的有效性和适用性。
1直线行驶不稳定跑偏分析
如图1所示,车辆以速度Vx直线行驶,当垂直载荷转移和附着系数互异路面干扰两侧车轮驱动力失衡时,设Fx2+Fx4>Fx1+Fx3,两侧车轮将绕垂直于地面的质心轴产生逆时针方向横摆力矩。为达到运动平衡状态,轮胎发生侧偏,侧偏角为αi(i=1,2,3,4分别代表左前轮、右前轮、左后轮和右后轮),以侧向力Fyi形成反向横摆力矩,抵制横摆角速度的增大。随着轮胎侧偏力增加,最终轮胎纵、侧向力绕质心轴的横摆力矩为0。此过程产生一个恒值非0的横摆角速度r,致使车辆直线行驶持续跑偏。

图1 两侧车轮驱动力不等时车辆跑偏过程
车辆直线跑偏的根本原因是两侧车轮驱动力不相等;直接原因是产生导致行驶跑偏的横摆角速度。选取车辆横摆角速度为系统被控变量,监控车辆直线行驶状态,并对各轮电机驱动进行协调控制与分配,实时纠正跑偏,从而提高车辆直线行驶稳定性。
2仿真模型
为进行四轮独立驱动协调控制系统仿真,采用了模块化思想,建立输入量为电机驱动电压、输出量为车辆直线行驶信息的仿真模型,主要包括整车动力学模型、轮胎模型和轮毂电机模型等子模型。
2.1整车动力学模型
四轮独立驱动电动车动力学模型主要包括车体纵向、侧向、横摆和车身垂向、俯仰、侧倾6自由度,车轮转动4自由度,车轮垂向4自由度,共14自由度[9]。假设车辆水平面行驶,前后轮距相等,质心在车轴中心线上,静止时各轮胎力学特性相同。
车辆的6自由度动力学方程:
(1)
独立悬架单轮非簧载质量垂向运动方程:
(2)
车身簧载质量受到各悬架作用力:
(3)
由侧倾俯仰形成的悬架与车身连接点绝对位移:
(4)
四驱动车轮旋转力矩平衡方程:
(5)
式中:M为整车质量;Mb为簧载质量;Mt为车轮非簧载质量;Fxi为轮胎纵向力;Fyi为轮胎侧向力;Fw为行驶空气阻力;Vx为整车纵向速度;Vy为整车侧向速度; Vz为簧载质量质心垂向速度;zb为簧载质量的质心高度;zti为车轮非簧载质量的质心高度;qi为4车轮的路面垂向输入;lf,lr分别为前轴和后轴到质心的距离;T为轮距;Rei为车轮滚动半径;hx,hy分别为整车质心到侧倾轴和俯仰轴的距离;Ix,Iy,Iz分别为侧倾、俯仰和横摆转动惯量;θ为俯仰角;φ为侧倾角;r为横摆角速度;ksi为悬架刚度;bsi为悬架阻尼;Kt为轮胎垂直刚度;J为电机轮转动惯量;Tei为电机输出转矩;ωci为电机轮旋转角速度;Tfi为车轮滚动阻力矩。
2.2轮胎模型
为了准确得到轮胎纵向力和侧向力,采用能模拟轮胎各工况受力状态、具有高仿真精度的半经验幂指数轮胎模型[10]。模型输入主要有纵向滑转率、侧偏角和垂直载荷等。
模型输出轮胎纵向力:
(6)
模型输出轮胎侧向力:
(7)
由式(2)得各轮胎垂直载荷:
(8)
式中:E为总切力曲率因子;φx,φy和φ分别为定义纵向、侧向及量纲为1的总滑移率;μx,μy分别为轮胎纵向、侧向摩擦因数。
2.3轮毂电机模型
轮毂电机是四轮独立驱动系统动力源,其机械原理及特性直接影响到车辆驱动协调控制效果。现在多数研究过于简化电机模型,完全理想化,按驱动需求输出转矩。本文建立简化了的且能体现驱动特性的电机模型,由文献[11]得直流无刷轮毂电机传递函数:
(9)
式中:Ud,Rd,Ld分别为导通两相绕组的端电压、电阻和自互电感差;KT为转矩系数;Ke为反电动势系数;Bv为黏滞摩擦因数。
直流无刷电机的电流与输出转矩成正比,将电流Id和转速ωc分别作为电机系统的2个状态变量,增加电流对电机输入电压的反馈κ和相应电路延迟Ks,构成电流和转速双闭环调节电机模型,如图2所示。

图2 电机驱动模型框图
3四轮独立驱动协调控制系统设计
四轮独立驱动协调控制系统输出协调分配后的各轮毂电机的输入电压调节值△Ui,主要由基于滑模变结构控制的附加横摆力矩计算,以及直线行驶稳定分配与车轮防滑控制两部分组成,如图3所示。

图3 四轮驱动协调控制系统框图
3.1基于滑模变结构控制的附加横摆力矩计算
滑模变结构控制的滑动模态不受系统参数摄动和外界扰动影响,具有良好的动态品质和鲁棒性[12],较符合车辆直线行驶稳定控制要求。在横摆稳定状态下,前后轮侧偏力与两侧车轮驱动力绕质心轴横摆力矩大小相等、方向相反。为防止或消除直线行驶的横摆跑偏,即轮胎侧偏,需要调节两侧轮毂电机转矩产生附加横摆力矩。由车辆横摆运动方程得:
(10)
横摆角加速度体现车辆直线跑偏趋势,横摆角速度致使车辆持续直线跑偏,横摆角则反映车辆直线跑偏程度。为保证良好直线行驶稳定性,设计了由这三者构成的滑模面切换函数:
(11)
其中k1,k2为待定权重系数。为满足滑模到达条件,即在较短时间内快速到达滑模面,保证系统动态品质和鲁棒性,削弱滑模面运动抖振,对滑模运动采用改进的指数趋近律[13]处理:
(12)
式中,sgn(s)为符号函数。系数k3越大,在远离滑模面时趋近速度越大;ε越小,则在滑模面附近抖动速度越小。合理调整k3和ε值可提高滑模变结构控制性能。由式(11)和(12)得:
(13)
将式(13)代入式(10),计算纠正直线行驶跑偏所需的附加横摆力矩:
(14)
3.2直线行驶稳定协调分配与防滑控制
直线行驶协调控制的关键是尽可能有效、快速地产生纠偏所需的附加横摆力矩,同时保证满足车辆纵向驱动的转矩需求,因此采用四轮平均和两侧车轮正负相反的方式对附加横摆力矩ΔMz进行分配。车轮驱动力调节值与ΔMz的分配关系为:
(15)
电机转矩等于车轮半径与驱动力的乘积,与电流成正比。结合式(15),将分配给车轮的附加横摆力矩ΔMz转换成轮毂电机电流调节量:
(16)
电机转矩由电流控制,而电流控制是通过调节电子功率开关逆变器改变导通两绕组相电压实现的。基于电流调节量,对正常驱动车轮采用PID控制方法计算轮毂电机产生附加横摆力矩协调分配量的电压调节值:
(17)
式中KMp,KMi和KMd分别是协调分配PID的控制比例系数、积分常数和微分常数。
在分配调节过程,当增大驱动转矩侧车轮出现滑转时,为使车辆在低附着系数路面获得较大驱动力,设防滑阀值Sp为0.25,即当车轮滑转率Sxi大于Sp时,对出现滑转车轮实行PID防滑控制[14]。由Sxi与Sp差值ei计算轮毂电机防滑所需的电压调节值:
(18)
其中Ksp,Ksi和Ksd分别是车轮防滑PID控制中的比例系数、积分常数和微分常数。
协调控制系统分配流程如图4所示,其中γ是控制阀值(设定γ=0.05 (°)/s),系统输出经协调控制与分配的各电机驱动电压调节值。
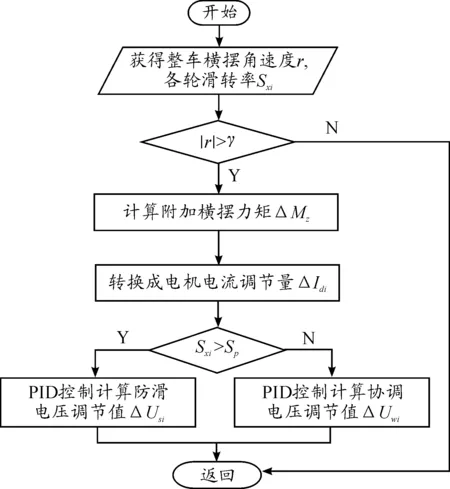
图4 协调控制系统分配流程
4仿真结果及分析
根据各模块的物理模型,在Matlab/Simulink中建立四轮独立驱动协调控制系统模型,主要参数见表1。采用两侧车轮附着系数互异路面和垂直载荷转移工况进行仿真分析,验证协调控制效果。
4.1两侧车轮附着系数互异路面仿真
对开路面即为车辆两侧车轮附着系数高低不同的路面,设左右侧车轮接触路面的附着系数分别为0.1和0.8,给电机输入47V驱动电压,车辆从静止开始加速至匀速行驶,施加协调控制前后车辆的仿真控制结果如图5~11所示。
表1仿真主要参数

参数数值整车质量M/kg730前轴到质心距离lf/m0.935后轴到质心距离lr/m0.830前/后轮距T/m1.425绕x侧倾转动惯量Ix/(kg·m2)450绕y俯仰转动惯量Iy/(kg·m2)871绕z横摆转动惯量Iz/(kg·m2)953电动轮转动惯量J/(kg·m2)1.2总切力曲率因子E0.3轮胎纵向摩擦因数μx0.8轮胎侧向摩擦因数μy0.8轮胎纵向刚度Kx/(N·m-1)11300轮胎侧向刚度Ky/(N·m-1)16900轮胎垂直刚度Kt/(N·m-1)210000电机转矩系数KT/(N·m·A-1)0.62电机反电动势系数Ke/(V·s·rad-1)0.62电机两相绕组自互电感差Ld/H1.15×10-4电机两相绕组电阻Rd/Ω0.0365电机黏滞摩擦因数Bv/(N·m·s)0.0001

图5 车辆横摆角速度r对比

图6 车辆侧向加速度ay对比

图7 直线行驶车速对比

图8 车辆直线轨迹跑偏量对比

图9 车轮滑转率Sxi对比
在无控制下两侧电机驱动电压平均分配,轮毂电机输出的转矩相等。在起步阶段,由于低转速时电机输出的转矩较大,低附着系数路面一侧车轮出现滑转,无法提供与高附着系数路面一侧车轮相等的驱动力,车辆从而产生横摆和跑偏运动,以致无法正常稳定起动,偏离最初的直线方向行驶。
施加协调控制后,车辆加速性能虽略微降低,但最终稳定的车速有一定提高。车轮滑转率基本控制在0.25内,横摆角速度、侧向加速度和直线轨迹跑偏量分别不大于0.12 °/s,0.01m/s2和0.7m。由此表明:协调控制使四轮独立驱动电动车在对开路面直线启动行驶的稳定性得到了提高和保证。

图10 电机驱动电压Ui对比

图11 车轮驱动力Fxi对比
4.2两侧车轮垂直载荷转移仿真
两侧车轮垂直载荷转移主要分两种:一是由车内乘员载荷或两边倾斜路面等形成的稳定垂直载荷转移;二是不平路面等工况导致的瞬态垂直载荷转移。
4.2.1稳定垂直载荷转移
在良好附着路面,车辆以约60km/h的速度直线行驶,仿真40s时左侧前后轮垂直载荷分别增加100N,右侧前后轮垂直载荷分别减少100N。车辆直线跑偏仿真与协调控制情况分别见图12~17。

图12 车辆横摆角速度r对比

图13 车辆侧向加速度ay对比

图14 直线行驶车速V对比

图15 车辆直线轨迹跑偏量对比

图16 电机驱动电压Ui对比

图17 车轮驱动力Fxi对比
在两侧车轮突遭垂直载荷转移干扰过程时,各轮未发生滑转,但驱动力平衡状态改变,导致车辆产生横摆角速度和横摆角,直线行驶时向左跑偏,且车速下降。施加协调控制后,在车辆遭到干扰时迅速分配两侧轮毂电机输出转矩,将横摆角速度(0±0.05 °)/s和侧向加速度(0±0.01)m/s2限定在较小范围内,从而有效快速防止车辆跑偏,保持直线行驶车速稳定,跑偏量由150m变为-1.2m。
4.2.2瞬态垂直载荷转移
在给定电机47V驱动电压下,车辆以约60km/h的速度匀速直线行驶,仿真40s时驶入所建立的E级不平路面[15],相应的仿真控制效果如图18~23所示。

图18 车辆横摆角速度r对比

图19 车辆侧向加速度ay对比

图20 直线行驶车速V对比

图21 车辆直线轨迹跑偏量对比

图22 电机驱动电压Ui对比

图23 车轮驱动力Fxi对比
由图18可知:两侧车轮瞬态垂直载荷转移产生的横摆角速度虽大,但方向左右频繁改变,因此所能形成的横摆角较小,车辆跑偏现象不明显。如图21和23所示:协调控制前后,虽由车轮驱动力对比无法判别控制效果,但车辆最大跑偏量由2.5m减小到0.03m,说明协调控制仍有效保证横摆角速度左右频变类型工况的车辆直线行驶的稳定性。
5结论
1) 设计的协调控制系统能快速消除由车轮自身滑转和垂直载荷转移等车辆纵向力干扰工况导致两侧车轮驱动力失衡而产生的车辆直线行驶跑偏,具有较好的适用性。在干扰工况下,四轮独立驱动电动车的直线行驶稳定性得到有效保证。
2) 在车轮出现滑转情况下,协调控制车轮滑转与直线行驶稳定性,将车轮滑转率限制在设定范围内,减小了直线跑偏和车轮滑转对车辆动力性的影响。由于受电池系统所能提供电机的输入电压范围的限制,纠偏的快速性受限,尤其对复杂左右跑偏的协调控制效果还需进一步研究。
参考文献:
[1]余卓平,冯源,熊璐,等.分布式驱动电动汽车动力学控制发展现状综述[J].机械工程学报,2013,49(8):105-111.
[2]杨志安.四轮独立驱动电动车辆直线行驶特性的研究[D].秦皇岛:燕山大学,2012.
[3]WANGLifang,LIYong,LIJunfeng,etal.TorqueCoordinationControlofDistributedDriveElectricVehicleforStraightLineDriving[C]//2014IEEETransportationElectrificationConferenceandExpo,ITECAsia-Pacific2014.Beijing:IEEE,2014.
[4]张缓缓,王庆年.电动轮驱动电动汽车直线行驶转矩协调试验研究[J].汽车技术,2010(8):16-19.
[5]DONGZ,HEP,HANC.TheDesignofAnti-slipControlforIn-wheelMotoratTheLimitedConditionsinaFourIn-wheelMotorDriveElectricVehicle[C] // 2012 19thInternationalConferenceonMechatronicsandMachineVisioninPractice,M2VIP2012.Auckland,NewZealand:IEEE,2012.
[6]XUWenli,WUSen,TIANShaopeng,etal.StudyontheStraight-LineRunningStabilityofOff-roadVehiclewithIn-wheelMotors[C]//4thInternationalConferenceonManufacturingScienceandTechnology,ICMST2013.Dubai,Unitedarabemirates:[s.n.],2013:454-458.
[7]褚文博,罗禹贡,赵峰,等.分布式驱动电动车辆驱动转矩协调控制[J].汽车工程,2012,34(3):185-189.
[8]MAEDAK.FUJIMOTOH,HORIY.Four-wheelDriving-forceDistributionMethodforInstantaneousorSplitSlipperyRoadsforElectricVehiclewithIn-wheelMotors[C]//2012 12thIEEEInternationalWorkshoponAdvancedMotionControl,AMC2012.Sarajevo,BosniaandHerzegovina:IEEE,2012.
[9]李刚,李宁,段敏,等.基于Simulink的四轮轮毂电机电动汽车仿真模型开发[J].辽宁工业大学学报,2012,32(3):185-189.
[10]郭耀华.驱动与制动工况轮胎模型研究[D].长春:吉林大学,2009.
[11]刘锋.轮毂驱动电动汽车整体设计与研究[D].武汉:武汉理工大学,2011.
[12]刘金琨.滑模变结构控制MATLAB仿真[M].2版,北京:清华大学出版社,2012.
[13]毛艳娥,井元伟,张嗣瀛,等.基于滑模控制的四轮驱动电动汽车稳定性控制[J].系统仿真学报,2008,20(5):1243-1246.
[14]LIJunwei,QUBaojun.ResearchonAccelerationSlipRegulationSystemforTwoWheelDriveElectricVehicle[C] //Proceedingsofthe2009IEEEInternationalConferenceonMechatronicsandAutomation,ICMA2009.Changchun:IEEE,2009:807-811.
[15]方浩,李晓宾,王璐,等.基于路面随机激励的8自由度整车动力学仿真[J].中国工程机械学报,2007(2):167-173.
(责任编辑杨文青)
Coordinated Control for Straight-Line Driving Stability ofaFourWheelIndependentDriveElectricVehicle
HUANG Xi-chaoa,JIANG Hongb,XU Xinga
(a.School of Automotive and Traffic Engineering;b.SchoolofMechanicalEngineering,JiangsuUniversity,Zhenjiang212013,China)
Abstract:Inordertoreducetheeffectonthestraight-linedrivingstabilityofafourwheel-motor-drivenelectricvehicleengenderedbyverticalloadsandadhesionroadinequalitybetweenwheelsonbothsides,thecoordinatedcontrolsystemwasdesignedthroughanalyzingthereasonsofvehicledeviation.Therequiredadditionalyawmomentofcorrectingvehicledeviationwascalculatedbyslidingmodelcontrol,andthenthevoltageregulationvaluesofhubmotorforgeneratingtheadditionalyawmomentorantiskidcontrolwasdistributedcoordinatelywiththemotordrivingprincipleandthewheelslipstatesinthedesignedsystem.Simulationwasimplementedinthe14DOFsvehiclemodelestablishedbyMatlab/Simulinkunderdifferentoperatingconditions.Comparedwiththesituationsofvehicledeviationintheaverageallocationofdrivingwithoutanycontrol,thesimulationresultsshowthattheyawofvehicleisintherangeof(0±0.05°)/spresetedandthestraight-linedrivingstabilityisimprovedobviously.
Keywords:hubmotor;fourwheelindependentdriving;slidingmode;coordinatedcontrol;straight-linestability
收稿日期:2015-10-10
基金项目:江苏省“六大人才高峰”项目(2014-JXQC-004)
作者简介:黄锡超(1987—),男,广东人,硕士研究生,主要从事电动汽车性能模拟与控制研究。
doi:10.3969/j.issn.1674-8425(z).2016.06.004
中图分类号:U469.72
文献标识码:A
文章编号:1674-8425(2016)06-0017-09
引用格式:黄锡超,江洪,徐兴.四轮独立驱动电动汽车直线行驶稳定协调控制[J].重庆理工大学学报(自然科学),2016(6):17-25.
Citationformat:HUANGXi-chao,JIANGHong,XUXing.CoordinatedControlforStraight-LineDrivingStabilityofaFourWheelIndependentDriveElectricVehicle[J].JournalofChongqingUniversityofTechnology(NaturalScience),2016(6):17-25.
猜你喜欢
制造技术与机床(2019年10期)2019-10-26
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
测控技术(2018年3期)2018-11-25
制造技术与机床(2017年3期)2017-06-23
自动化学报(2017年4期)2017-06-15
北京航空航天大学学报(2016年7期)2016-11-16
中国塑料(2015年3期)2015-11-27
空间控制技术与应用(2015年2期)2015-06-05
