电动汽车的整车动力匹配仿真
2016-07-28 09:36张志强冯倍茂东风柳州汽车有限公司PV技术中心广西柳州545000
汽车电器 2016年5期
熊 禹,周 辉,张志强,廖 黎,冯倍茂,丁 磊(东风柳州汽车有限公司PV技术中心,广西 柳州 545000)
电动汽车的整车动力匹配仿真
熊禹,周辉,张志强,廖黎,冯倍茂,丁磊
(东风柳州汽车有限公司PV技术中心,广西 柳州545000)
摘要:动力性指标和续航里程达标是电动汽车最基本的性能要求。本文通过AVL的CRUISE软件,对电动汽车的动力性能和续航里程进行模拟仿真,在整车设计阶段提前验证车辆基本性能是否达标,对车辆的开发有效性进行提前判断,缩短整车开发的日程。相关的仿真计算结果,通过试验验证对比进行校正,修正仿真结果的偏差,相关偏差可以作为经验值,有效应用到后续车型开发。
关键词:电动汽车;CRUISE;动力性;经济性;续航里程
为解决地球变暖等环境的问题,世界各国各大汽车厂商都在对超低油耗及零排放的实现技术路线进行研发。在各种技术路线中,HEV和EV将会优于其他技术开始进行普及[1]。
与传统汽车一样,整车动力性、经济性达标是电动汽车开发目标达成的一个基本要求。电动汽车的动力性及经济性最主要有以下几个指标:加速性、最高车速、爬坡度以及续航里程。为了确保车辆品质目标顺利达成,车辆开发的一般流程要经历如下阶段:根据法规、客户要求等开发需求,输入、设定车辆整车性能目标,进行整车及关键系统的指标设计,通过CAE技术仿真验证整车及关键系统的目标达成可行性,然后进行详细数据设计及冻结、系统及部件单体验证、系统集成验证,最后实车试制制造,进行实车整车试验及测试验证。
整车动力性经济性的匹配计算及仿真,是整车开发CAE应用中的重要一环,有利于减少开发周期反复和成本浪费。
1 工具及基本方法介绍
AVL公司的CRUISE,是整车性能仿真领域中最常用的一个工具。其功能模块丰富,可用于传统汽车的燃油经济性排放分析,也可用于各种类型新能源汽车的动力经济性分析,对纯电动汽车的动力性及续航里程的仿真非常便利。CRUISE具有丰富的模型修正经验,并具有丰富的接口,可与MATLAB、SIMULINK等进行接口,便于用户进行模型算法二次开发。同时CRUISE提供了图形化的交互环境,只需使用图形拖拽的方式进行模型建立和系统配置,应用相当便利[2]。
2 整车动力系统匹配计算
2.1整车关键参数及性能目标要求
整车关键参数及性能要求:迎风面积2.2m2,风阻系数0.3,整备质量1400 kg,满载质量1775 kg,轮胎规格195/60R16,滚动阻力系数0.008,0—100km/h加速时间<11 s,最高车速≥150 km/h,爬坡度>30%,NEDC循环下续航里程>250km。
2.2动力性估算
为满足车辆的动力性需求 (加速时间、最高车速、爬坡度),需结合理论计算进行功率估算[3]。
汽车的行驶阻力平衡方程为

式中:Ft——驱动力;Ff——滚动阻力;Fw——风阻;Fi——坡道阻力;Fj——加速阻力。
驱动力:Ft=PtηT/va
式中:Pt——电机输出功率;ηT——传动系统效率,单级减速器,一般在0.95~0.97之间;va——汽车行驶速度,km/h。
滚动阻力:Ff=mgfcosα

式中:m——汽车计算载荷工况下的质量,kg;g——重力加速度,m/s2;α——道路坡角,rad;va——汽车行驶速度,km/h;f——滚动阻力系数,对于H级轮胎,推荐范围如下:f0——0.0081~0.0098以上 ,取 0.0095;f1——0.00012~0.0025,取 0.0020;f4——0.0002~0.0004以上,取0.0003;c——对于良好沥青路面,c=1.2。
式中:CD——风阻系数;A——迎风面积,m2;va——汽车行驶速度,km/h。
坡道阻力:Fi=mgsinα
式中:m——汽车计算载荷工况下的质量,kg;g——重力加速度,m/s2;α——道路坡角,rad。

在汽车行驶方程式的基础上,经过单位换算整理可以得到汽车的功率平衡方程式

2.2.1平坦道路0—100km/h的加速时间小于等于11s所需的功率Pj[4]

2.2.2为满足最高车速150km/h的功率Pv

经过计算得到:P2=30.9kW

综合Pj、Pv和Pα,为满足这3种动力需求,电机最大功率需要大于70 kW。根据经验,在此基础上放大1.1的保险系数,电机峰值功率需满足大于77kW。
2.3关键系统参数选型
结合动力性需求和现有产品,选择最为合适的电机,电机相应参数为:峰值功率80kW,峰值扭矩260 Nm,最高转速11000 r/min,主减速器速比8.2。电池包峰值功率大于电机峰值功率,结合现有产品选型,电池包峰值功率100kW。
3 仿真模拟
3.1整车模型建立
在AVL CRUISE中,将相关模块拖入模型窗口,建立机模、电气、信号及相关模型算法的连接,并对各模输入关键参数。整车关键参数见章节2.1,电池包关键参数:电能36 kW·h,SOC范围 (DOD)5%~ 95%,额定电压374 V,电压范围351~426 V,峰值放电功率110 kW (SOC10,10 s),峰值充电功率69 kW (SOC90,10s)。电机及传动系统参数:电机类型为永磁同步,最大功率80 kW,最大扭矩260 Nm,最高转速11000r/min,速比8.2,电机最大效率96%,传动效率95%。所选电机的效率map图如图1所示。

图1 电机效率map
根据实车配重,测试拟合滑行曲线:y=101.65+ 1.2468x+0.0287x2。
3.2整车能量控制
车辆加入再生制动能量回收策略,主要关注NEDC工况下车辆的续航里程目标。在NEDC车辆减速工况时,通过尽可能多地使用发电机的电制动替代制动踏板的机械制动,使电制动转化为电能给电池包充电,以延长整车在NEDC工况下的续航里程。整个NEDC工况,总共由4个相同的市区工况 (图2a)及1个郊区工况 (图2b)组成。

图2 汽车运行工况图
对所有减速工况的能量进行简略计算,不考虑损失,一个NEDC可用于转化储存的能量为0.43 kW·h。考虑传动效率、电机效率,按85%综合计算,一个NEDC可储存能量为0.37kW·h。
3.3仿真计算结果
1)动力性0—100km/h加速时间如图3所示,为9s,满足设计要求 (<11s)。
能够达到的最高车速为169km/h,满足设计要求(>150km/h),如图4所示。
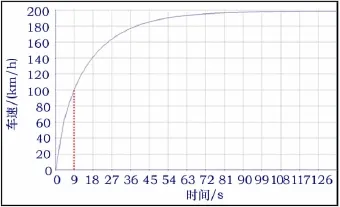
图3 百公里加速时间

图4 最高车速
不同车速下的最大爬坡度如图5所示,在30km/h车速下,最大爬坡度为44.5%,满足设计要求 (>30%)。

图5 爬坡度
2)续航里程基于如图6所示的工况的续航里程仿真。每个NEDC行驶里程为15.3km,一个NEDC工况消耗SOC5.2%。整个SOC窗口范围续航里程为260km。

图6NEDC仿真
4 实车测试符合性验证
实车样车装车后,进行了动力性及续航里程测试验证。
4.1动力性试验数据
1)0—100 km/h加速时间测试百公里加速时间为10.5s,如图7所示。

图7 实测加速时间
2)车辆最高车速测试车辆测试最高车速为156.1km/h,如图8所示。

图8 实测最高车速
3)最大爬坡度测试30km/h时最大爬坡度为35%。
4.2续航里程测试
常温25℃下,车辆半载情况下,在转毂试验台加载NEDC工况下,测试行驶里程为251km。
5 结论
通过实车测试验证,AVL CRUISE动力性经济性仿真结果的趋势符合,具有可参考性。但CRUISE仿真的精确性基于动力系统关键零部件试验数据的准确性。在开发前期,对电池、电机等关键部件的试验数据缺乏时,只能基于普适性的参数进行模拟,难以保证仿真的准确性。只有当关键性的零部件试验数据比较准确时,应用CRUISE仿真模拟计算的结果精确程度才比较高。
参考文献:
[1]日本自动车技术会.汽车工程手册 (10,新能源车辆设计篇)[M].中国汽车工程学会组译.北京:北京理工大学出版社,2014.
[2]隗寒冰,李军.基于AVL_Cruise仿真平台的汽车理论实验教学改革研究[J].科技信息,2010(29):584-585.
[3]余志生.汽车理论[M].北京:机械工业出版社,2008.
[4]孙永正,李献菁,邓俊,等.插电式串联混合动力轿车的选型匹配与仿真,汽车工程,2010,32(12):1015-1020.
(编辑杨景)
中图分类号:U469.72
文献标识码:A
文章编号:1003-8639(2016)05-0009-04
收稿日期:2016-04-05;修回日期:2016-04-14
作者简介:熊禹 (1983-),女,土家族,湖北建始人,工程师,硕士,主要研究方向为汽车电子电器及新能源系统设计、汽车通信及电磁兼容;周辉 (1984-),男,汉族,湖南南县人,工程师,硕士,主要研究方向为汽车动力系统匹配设计及汽车标定。
Electric Vehicle Power Performance Matching Simulation
XIONG Yu,ZHOU Hui,ZHANG Zhi-qiang,LIAO Li,FENG Bei-mao,DING Lei
(Passenger Vehicle Technical Centre,Dongfeng Liuzhou Motor Co.,Ltd.,Liuzhou 545000,China)
Abstract:Reaching the dynamic performances and mileage range targets is fundamental for the electric vehicle development.CRUISE of AVL could be used to simulate the power performance and mileage range in the very prophase of the vehicle development.By doing this,rationality of vehicle development could be checked beforehand,as a result,development lead time is reduced.This paper adjusts simulation results through comparing it with testing results,and the differences between them could also be used in the later project development as valuable experiences.
Key words:electric vehicle;CRUISE;power performance;economic efficiency;mileage range
猜你喜欢
房地产导刊(2022年4期)2022-04-19
汽车实用技术(2022年4期)2022-03-07
汽车工程师(2021年12期)2022-01-17
汽车工程师(2021年11期)2021-12-21
建材发展导向(2021年15期)2021-11-05
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
上海师范大学学报·自然科学版(2018年3期)2018-05-14
科技创新与应用(2016年36期)2017-02-21
中国新技术新产品(2017年2期)2017-01-20