
改进的锚泊阻尼计算准静态法
2016-07-28 12:26杨勇黄山
哈尔滨工程大学学报 2016年6期
杨勇,黄山
(1. 上海外高桥造船有限公司 设计研究院,上海 200137; 2.哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
改进的锚泊阻尼计算准静态法
杨勇1,黄山2
(1. 上海外高桥造船有限公司 设计研究院,上海 200137; 2.哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
摘要:针对海洋平台系统中锚泊阻尼的计算方法开展研究,提出一种改进的准静态计算方法。首先,设置工况分别利用Huse准静态法、Liu准静态法和全动态有限元法对锚泊阻尼进行计算。其次,鉴于导缆孔处的锚泊线单元水平位移较大,将其加入到两种准静态法中并再次计算锚泊阻尼。最后,在对各种方法所得结果对比分析的基础上,了解准静态法各自特点与不足,提出一种新改进的锚泊阻尼计算准静态法,并对新方法进行验证。结果表明:新方法的准确性和可靠性较好,与有限元法所得结果相近,可以作为一种有效的锚泊阻尼计算辅助方法。
关键词:海洋浮动式平台;锚泊阻尼;慢漂运动;准静态法;全动态有限元法
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160421.1040.022.html
锚泊系统除了对海洋浮动式平台提供回复力作用,其阻尼作用对平台的运动响应,特别是低频运动响应也十分的重要,相关研究表明锚泊阻尼最大可以占到系统总阻尼的80%[1]。全动态有限元法和准静态法是计算锚泊阻尼的两种主要方法,有限元法需要借助高性能、时域非线性有限元软件完成,计算成本较高。准静态法首先由Huse[2]提出,并利用该方法计算发现锚泊线在平台发生水平位移时会贡献很大一部分阻尼。Liu等[3]针对Huse提出的锚泊阻尼计算准静态法进行了改进,认为改进之后的方法在锚泊阻尼计算上的可靠性会更高。Bauduin等[4]提出了一种更为细化的准静态方法,将一个运动周期分为N步,但是该方法的实际操作性较为复杂,在这里将不做研究。Johanning等[5]在其论著中,也对准静态法进行了介绍和评述。乔东生等[6]认为当锚泊线顶端平台受到慢漂激励时,准静态法的结果是可以接受的,而利用该方法计算波频激励下的锚泊阻尼时,结果相差很远。Webster[7]则是用全动态有限元法对锚泊阻尼进行了无量纲分析,乔东生等[8-9]也利用有限元法对锚泊阻尼进行了计算和参数研究。
总体上而言,准静态法没有全动态有限元法精确,但是在锚泊系统设计初期或是在希望能够快速高效得到锚泊阻尼值时,准静态法是一种非常合适的方法[10]。分别以布置于400 m水深的钢索式锚泊线和布置于200 m水深的钢链式锚泊线为研究对象,分析了两种准静态法的特点,利用这两种方法计算慢漂激励下的锚泊阻尼值,与采取全动态有限元法所得到的结果进行对比,在这一基础上对该方法做进一步的改进,并验证改进后方法,所得到的结果与采用全动态有限元法所得到的结果十分相近。
1锚泊阻尼计算方法
1.1准静态法
根据Morison方程,作用在单位长度锚泊线ds上的拖曳力可以表示为
(1)
式中:ρs为海水密度,D为锚泊线水中等效直径,CD为拖曳力系数,V为锚泊线法线方向上水流与锚泊线的相对速度,ds为锚泊线微段长度。
假设锚泊线单元的法向运动位移方程为简谐运动,并表示为
(2)
式中:s为沿曲线的坐标,s=0代表海底锚点;η0(s)为锚泊线单元法向运动振幅。
对式(2)进行求导,代入式(1)中,并在一个运动周期内进行积分,可以得到锚泊线单元ds所消耗的能量:
(3)
从式(3)可以看出,锚泊线单元所消耗的能量与其法向运动振幅的三次方成正比,为了进一步简化公式,Huse提出锚泊线单元法向运动振幅η0(s)可以表示为
(4)
式中:ΔX为锚泊线单元一个运动周期内最大水平位移,ΔZ为锚泊线单元一个运动周期内最大垂向位移,θ为初始时刻锚泊线单元切线方向与水平方向的夹角。

(5)
在准静态法中,锚泊线的位置形态由悬链线方程计算得到。考虑锚泊线顶端位于振幅最大处、振幅最小处和中间位置时的三组形态,如图1所示。
在得到锚泊线消耗能量之后,线性化锚泊阻尼系数B可以通过下式进行计算:
(6)
式中:τ为锚泊线顶端平台慢漂牵引运动周期,a为锚泊线顶端平台慢漂牵引运动振幅。
从式(6)可以看出,在运动方程一定时,线性化锚泊阻尼系数与锚泊线消耗能量正相关,因此在方法准确性验证中,对比锚泊线消耗能量即可。

(7)
式(3)可以写为
(8)
式(5)可以写为
(9)
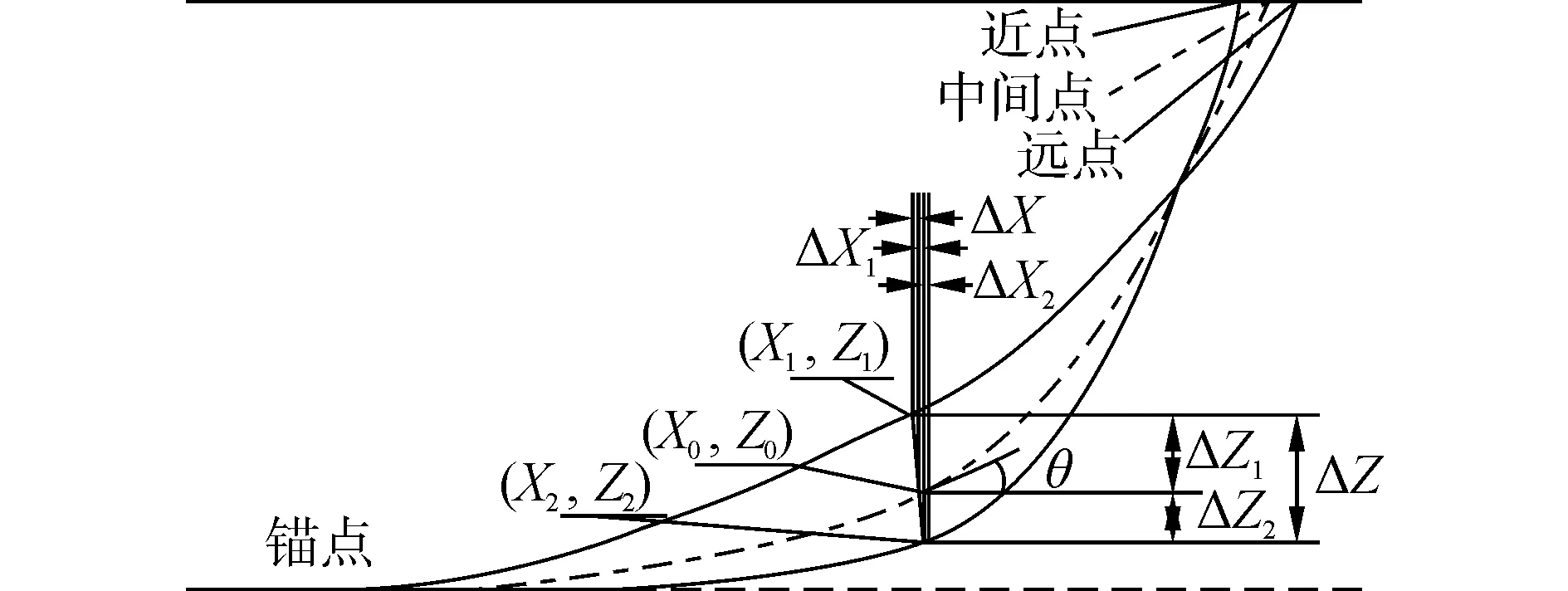
图1 准静态法示意图Fig.1 Schematic diagram of quasi-static method
1.2全动态时域有限元法
在全动态时域有限元法中,锚泊线在顶端平台的一个运动周期内所耗散的能量可以通过以下公式来计算:
(10)
式中:Th为锚泊线顶端张力瞬时水平分量,X为锚泊线顶端水平位移,τ为锚泊线顶端振荡周期。
其中,Th可以表示为
(11)
将式(11)代入式(10)中,可以得到:
(12)
从式(12)即可以推导得到式(6)。
全动态时域有限元法中消耗能量E的求解通常结合指示图法来完成,运算软件计算锚泊线顶端水平张力和实际水平位移,绘制锚泊线顶端水平张力-顶端水平位移曲线图,得到一个封闭曲线,该封闭曲线的面积即为锚泊线一个振荡周期内消耗的能量。
2准静态法与有限元法的对比研究
研究对象分别为钢索锚泊线和钢链锚泊线,各项参数如表1所示。在对原有两种准静态法进行分析时,仅仅以钢索锚泊线为研究对象。
以振幅为30 m,周期为300 s的简谐运动为例,考虑693、831和1 195 kN三个不同锚泊线顶端预张力值,根据悬链线方程原理,可以得到如图2所示的锚泊线在三个位置的形态(只给出两个预张力下的侧视图),锚泊线单元距离海平面垂向距离为h,距离锚泊线顶端水平距离为l。

表1 锚泊线参数
设计工况与锚泊阻尼计算结果如表2所示,分别利用Huse准静态法(Huse)、Liu准静态法(Liu)和全动态有限元法(FEM)对锚泊阻尼进行计算,同时考虑到两种准静态计算方法中,锚泊线单元在一个振荡周期内的最大水平位移均被忽略掉,但是这样的简化措施将对计算导缆孔处的锚泊线所贡献的锚泊阻尼产生很大的影响,因为这一区域的最大水平位移ΔX较大,因此研究中将考虑最大水平位移的两种方法分别命名为C. Huse法和C. Liu法,也利用其进行计算对比。表2中括号内数值为相应左侧列方法与全动态有限元法所得结果的相对误差,以工况1.1为例,慢漂运动的周期取为150 s,振幅取为30 m。
图3描述了表2工况利用各种方法所计算的锚泊线消耗能量E随着运动周期τ、运动振幅a的变化趋势。可以看出与Liu的方法相比,Huse的方法准确度较低,并且随着运动振幅的增加,准确度将越来越差,但是Liu模型恰恰相反,其方法在锚泊线处于高预张力时,所得到的结果比低预张力时更为准确,因为随着预张力的增加,锚泊线对于中间位置的几何不对称性越来越显著(如图4所示,以300 m,30 s运动为例,s为沿着锚泊线坐标长度),因此考虑悬链线方程这一特征是十分有意义的。但是两种方法所得到的结果均小于有限元法算得的结果,也证明了锚泊线单元的水平位移对总位移的贡献是不能忽略的。但是,在考虑进水平位移后, Liu的方法得到的结果超出了有限元法所得到的结果, Huse的方法则显示出了更多的不确定性,有些工况计算结果偏低,而有些则偏高。

注:粗线-预张力693kN,细线-预张力1 195kN。图2 锚泊线形态Fig.2 Mooring line profile


图3 锚泊阻尼计算结果对比(FEM,Huse,Liu,C.Huse,C.Liu)Fig.3 Comparison of mooring line damping (FEM, Huse, Liu, C. Huse, C. Liu)

设计工况FEM/kJHuse/kJ相对误差/%Liu/kJ相对误差/%C.Huse/kJ相对误差/%C.Liu/kJ相对误差/%预张力693kN1.1-150s、30m2593168735.0197323.928178.6313321.01.2-200s、30m145894934.9111023.915848.7176221.01.3-250s、30m93260734.971023.810148.8112821.01.4-300s、30m64742234.949323.87048.878321.01.5-300s、35m107267736.983222.411275.1129821.11.6-300s、40m1680102539.0132920.916991.1203321.01.7-300s、45m2529148741.2203819.424493.2305520.81.8-300s、50m3693208643.5303117.934127.6444820.4预张力831kN2.1-150s、30m5198378727.2449913.452260.6599815.42.2-200s、30m2923213027.1253113.429400.6337415.42.3-250s、30m1870136327.1162013.418810.6215915.52.4-300s、30m129894727.1112513.413070.7149915.52.5-300s、35m2170152229.9190812.120933.6251115.72.6-300s、40m3439230932.9306710.831628.1398015.82.7-300s、45m5239335536.047389.6456912.8605815.62.8-300s、50m7754471939.170978.5638517.7893715.3预张力1195kN3.1-150s、30m178501376522.9170514.5161589.5196159.93.2-200s、30m10067774323.195914.790899.7110339.63.3-250s、30m6443495523.161384.758179.770619.63.4-300s、30m4474344123.142634.740409.749049.63.5-300s、35m7599553627.273173.7647514.883459.83.6-300s、40m12259840731.4119042.9978920.2134539.73.7-300s、45m190541223435.8186042.41417025.6208279.33.8-300s、50m288061723340.2281732.21983731.1312408.5

图4 ΔZ1 - ΔZ2与ΔX1- ΔX2值沿着锚泊线长度s方向变化Fig.4 Value of ΔZ1- ΔZ2and ΔX1- ΔX2 plotted against the arc length s
3新改进准静态法的可靠性验证
Liu的方法要优于Huse的方法,但是考虑水平位移贡献后,Liu的方法会过高的计算锚泊线耗散能量。再加入锚泊线单元的水平位移后,Liu的方法在锚泊线单元一个运动周期内消耗能量的计算公式为
(13)
原本Liu的方法计算公式为
(14)
原本Huse的方法计算公式为
(15)
Liu在考虑悬链线方程的几何非线性后,将一个运动周期分为两个部分分开考虑,并将结果进行叠加,如果在这一基础上,进一步分开考虑最大水平位移和最大垂向位移对锚泊线单元法向位移的贡献,并进行叠加,可以得到新的公式为
(16)
下面将对式(16)的适用性和准确性进行验证,为了使研究更具一般性,在继续考虑上述24个工况的基础上,以钢链锚泊线为研究对象,考虑水深200 m,加入8个工况,利用准静态法和全动态有限元法分别进行计算,设计工况与结果如表3所示。

表3 设计工况与结果
从表3也可以发现,两种方法所得结果之间的相对误差十分相近。考虑到所选的设计工况包括了不同类型的研究对象、两种不同的水深、不同的预张力,同时运动的周期与振幅变化也几乎覆盖了平台低频慢漂振荡运动的范围。因此,研究所得到的结果具有一定的代表性和参考意义。图5描述了利用改进后的准静态法计算锚泊线消耗能量与全动态有限元法的计算结果对比,可以看出新方法的准确性相对较高。



图5 锚泊阻尼计算结果对比(FEM,新方法)Fig.5 Comparison of mooring line damping (FEM, New Approach)
4结论
基于对锚泊阻尼计算准静态法研究分析的基础上,通过公式推导和实际算例的验证对比,对原有的方法进行了改进,可得以下结论:
1)Liu的方法在考虑悬链线方程的几何非线性后,所得结果比Huse的方法更加接近全动态有限元法所得到的结果,但两方法所得到的结果均偏小。
2)在考虑锚泊线单元的最大水平位移之后, Huse的方法显示出了一定的不确定性,Liu的方法所得到的结果偏大,过高估计了锚泊线耗散能量值。
3)新改进后的准静态法所得到的锚泊线耗散能量值,在低频慢漂激励下,能够较好的与时域有限元法得到的结果相吻合,考虑到其高效、简便、准确率较高,新方法可作为一种辅助方法在研究或工程中进行应用。
参考文献:
[1]HUSE E, MATSUMOTO K. Mooring line damping due to first- and second-order vessel motion[C]//Proceedings of the 21st Offshore Technology Conference. Houston, USA, 1989: 135-148.
[2]HUSE E. Influence of mooring line damping upon rig motions[C]//Proceedings of the 18th Offshore Technology Conference. Houston, USA, 1986: 433-438.
[3]LIU Y, BERGDAHL L. Improvements on Huse′s model for estimating mooring cable induced damping[C]//Proceedings of the 17th International Conference on Offshore Mechanics and Arctic Engineering. Lisbon, 1998.
[4]BAUDUIN C, NACIRI M. A contribution on quasi-static mooring line damping[J]. Journal of offshore mechanics and arctic engineering, 2000, 122(2): 125-133.
[5]JOHANNING L, SIMTH G H, WOLFRAM J. Measurements of static and dynamic mooing line damping and their importance for floating WEC devices[J]. Ocean engineering, 2007, 34(14/15): 1918-1934.
[6]乔东生, 樊天慧, 欧进萍. 不同类型锚泊方式对深水浮式平台的阻尼贡献比较计算[J]. 船舶力学, 2014, 18(5): 507-515.
QIAO Dongsheng, FAN Tianhui, OU Jinping. Comparative calculation on damping contribution of different mooring types to deepwater floating platform[J]. Journal of ship mechanics, 2014, 18(5): 507-515.
[7]WEBSTER W C. Mooring-induced damping[J]. Ocean engineering, 1995, 22(6): 571-591.
[8]乔东生, 欧进萍. 深水悬链锚泊线粘性阻尼计算[J]. 海洋工程, 2009, 27(4): 16-22.
QIAO Dongsheng, OU Jinping. Calculation on viscous damping of deepwater catenary mooring line[J]. The ocean engineering, 2009, 27(4): 16-22.
[9]乔东生, 欧进萍. 深水悬链锚泊线阻尼计算[J]. 振动与冲击, 2011, 30(2): 24-31.
QIAO Dongsheng, OU Jinping. Damping calculation of a deepwater catenary mooring line[J]. Journal of vibration and shock, 2011, 30(2): 24-31.
[10]苏志勇, 陈刚, 杨建民, 等. 深海浮式结构物锚泊阻尼参数研究[J]. 海洋工程, 2009, 27(2): 21-28.
SU Zhiyong, CHEN gang, YANG Jianmin, et al. Study on deepwater floating structure mooring line damping parametes[J]. The ocean engineering, 2009, 27(2): 21-28.
本文引用格式:
杨勇,黄山. 改进的锚泊阻尼计算准静态法[J]. 哈尔滨工程大学学报, 2016, 37(6): 776-781.
YANG Yong, HUANG Shan. Improved quasi-static method for calculating mooring line damping[J]. Journal of Harbin Engineering University, 2016, 37(6): 776-781.
收稿日期:2015-04-21.
作者简介:杨勇(1988-),男,助理工程师. 通信作者:杨勇, E-mail:yycjx19881030@126.com.
DOI:10.11990/jheu.201504041
中图分类号:TE58;P751
文献标志码:A
文章编号:1006-7043(2016)06-0776-06
Improved quasi-static method for calculating mooring line damping
YANG Yong1, HUANG Shan2
(1. Design and Research Institute, Shanghai Waigaoqiao Shipbuilding Co., Ltd., Shanghai 200137, China; 2. College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
Abstract:Based on research of existing methods for calculating mooring line damping, in this paper, we introduce an improved quasi-static method. First, we calculate the mooring line damping for several series of load cases using the Huse quasi-static method, Liu quasi-static method, and the fully dynamic finite element method. Then, in the calculation of the two quasi-static methods, we take into account the horizontal displacement of the mooring line element, and again calculate the mooring line damping, since it is significant in the fairlead position. Finally, we analyze the results and compare them to better understand the features and disadvantages of the various methods. After verification, we introduce a improved quasi-static method. This new method demonstrates acceptable accuracy and reliability. The results obtained are similar to those generated by the finite element method. This method can be regarded as an effective auxiliary means for calculating mooring line damping.
Keywords:offshore floating platforms; mooring line damping; slow drift motion; quasi-static method; fully dynamic finite element method
网络出版日期:2016-04-21.
