异步雷达组网协同跟踪动态传感器分配算法
2016-08-18 07:48尹德兴郭宝峰
火力与指挥控制 2016年7期
尹德兴,左 燕,郭宝峰,谷 雨
(杭州电子科技大学通信信息传输与融合技术国防重点学科实验室,杭州 310018)
异步雷达组网协同跟踪动态传感器分配算法
尹德兴,左燕,郭宝峰,谷雨
(杭州电子科技大学通信信息传输与融合技术国防重点学科实验室,杭州310018)
针对异步雷达组网下的协同跟踪问题提出了一种基于异步顺序融合的动态传感器分配算法。该算法对异步雷达的量测值按采样时刻顺序滤波,根据滤波协方差和目标期望协方差的接近程度动态选择下一时刻跟踪的最优传感器集合。仿真分析表明该算法和基于伪量测的异步雷达组网协同跟踪传感器分配算法相比具有较少的计算量和较高的目标跟踪精度。
异步雷达组网,协同跟踪,传感器分配,协方差控制,顺序融合
0 引言
随着传感器、计算机、网络和电子装备的飞速发展,各种面向复杂应用背景的多传感网络大量涌现[1]。以组网雷达为核心的防空预警网通过多个传感器组网进行协同探测,可以提高系统的总体探测性能。当多个传感器组网协同跟踪时,如何合理分配雷达网内有限的传感器资源,充分发挥传感器的认知能力,最大限度地获取所需目标信息提升跟踪性能已成为军事领域研究的重点。
传感器目标跟踪资源管理问题最早是由Nash[2]提出,采用卡尔曼滤波跟踪误差协方差矩阵的迹度量跟踪精度,建立线性规划模型进行传感器分配。随后,Hinz[3]和Schmaedeke[4]将信息论的方法引入传感器分配。基于信息论的传感器分配方法采用信息增量指标(Kullback-Leibler信息距离[5]、Rényi信息差异[6]等)定量描述目标跟踪的性能,通过最大化信息增量的准则对传感器资源进行优化分配。Kalandros提出了基于协方差控制的传感器管理方法[7-8]。该方法根据目标的期望跟踪协方差(即期望跟踪精度)和目标估计实际协方差的差异进行传感器分配,直接控制目标的跟踪精度。上述研究都是假定多个传感器对目标的观测同步。然而在一个实际的雷达组网探测系统中,各雷达具有不同的采样周期、不同通讯延迟等原因,在融合中心得到的各雷达的数据通常是不同步的[9]。因此,雷达组网协同跟踪过程需要考虑异步融合问题。
对此,本文提出了一种基于异步顺序融合的传感器分配方法。该方法对异步雷达的量测值按采样时刻顺序滤波,在每一个量测数据到达之后采用递推方法进行融合处理,根据滤波协方差和目标期望协方差的接近程度动态选择下一时刻跟踪的最优传感器集合,在保证跟踪精度的前提下提高计算的效率。最后本方法与文献[10-11]进行了仿真比较研究。
1 异步雷达组网目标跟踪最优顺序融合算法
考虑对一个运动目标进行跟踪,它的状态方程可描述为

式中:xk为时刻目标的状态向量,Φk+1为目标的状态转移矩阵,(系统噪声)为零均值、协方差为Qk的高斯白噪声过程。
假设有N部开机时间不同且具有不同采样速率的雷达对目标进行独立观测,第i部雷达的采样周期为Ti(i=1,2,…,n),融合中心的融合周期为T,T等于各部雷达采样周期的最小公倍数。在融合中心的第k个融合周期间隔[(k-1)T,kT]内,所有雷达共测量到Nk个量测值。在这个融合周期中,某个雷达可能提供一个或多个量测,也有可能不提供量测。令表示雷达i在第k个融合周期内提供的量测值的个数,则


图1 融合中心获得的一个周期内的测量
目标的量测方程可描述为

GLP-1对骨代谢的调节是双向的,既可以促进骨形成,又能抑制骨吸收。其可能通过促进胰岛素分泌,改善血糖、血脂,改善微循环,降低降钙素的分泌以及直接激活骨髓间充质干细胞(BMMSCs)上的GLP-1R实现对骨代谢的调节作用。
由式(1)可知,融合周期内各采样点间的状态关系式为:

文献[12]证明了由式(3)和式(4)构成的多传感器跟踪系统的异步融合问题可以转化为等价系统的顺序滤波融合问题。在此基础上,给出一种异步雷达组网的最优顺序融合算法。该算法根据数据到达的先后原则,利用卡尔曼滤波结合融合周期内顺序到达的观测值依次对目标状态的估计值进行更新。

其中


2 基于跟踪精度控制的异步雷达组网动态传感器分配
传统的异步融合算法中,卡尔曼滤波的每次更新都需要用到全部的测量数据,这不仅占用了所有的传感器资源,对于集中式融合系统来说无疑加重了融合中心的负担,影响了系统的实时性。在保证系统对跟踪精度要求的前提下,尽可能减少雷达的开机时间,以便在完成任务的同时减低被敌方发现的概率。目标的跟踪精度需求可以用期望协方差刻画,通过目标实际协方差和期望协方差的接近程度动态选择最佳传感器组合来满足跟踪精度要求。
假设N个雷达组网对空中运动目标进行组网跟踪。传感器组合的集合为D(不包括空集的组合),记Dj为第j种传感器组合。第k个时刻选择第j种传感器组合Dj获得的目标估计协方差矩阵为Pj(k|k)。实际协方差Pd(k)与期望协方差的偏差为Pj(k|k)

如果实际协方差的椭圆(虚线)超出(或部分超出)期望协方差的椭圆(实线)所包含的范围时ΔP<0(如图2(a)所示),表明实际的跟踪精度未达到期望要求。如果实际协方差的椭圆(虚线)被期望协方差的椭圆(实线)所包含ΔP>0(如图2(b)所示)),则表明实际的跟踪精度满足期望跟踪精度的需求。
对不同的传感器组合,得到的目标估计协方差也有所不同。通过选择一个最小的传感器组合Dopt使得其获得的实际协方差Popt满足期望的跟踪精度Pdk。对此,本文选择协方差误差矩阵的最小特征值大于零的最小传感器集合为最优传感器组合进行协同跟踪。
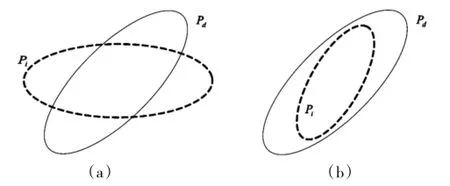
图2 期望协方差与实际协方差的几何关系
由于网内雷达的开机时间和采样周期不同,在不同融合周期内,每个雷达提供的观测数据量也不同。因此,在每个融合周期,需要预先计算传感器个数和获得的观测值个数。如第1节所述,每个雷达i的开机时间为Si、采样周期为Ti,融合周期为T。令表示融合中心获得测量值的时刻距(k-1)T时刻的时间间隔,则雷达i在[(k-1)T,kT]内的测量值个数可预测为

可采用的传感器个数为

基于跟踪精度控制的异步雷达组网动态传感器分配算法如下:
步骤2:在第k个融合周期内,根据式(9)和式(10)计算可用雷达个数N和各雷达测量值个数;
步骤3:根据第k个融合周期内的可用雷达,按雷达个数递增次序构造传感器组合集合D;初始化j-1;
步骤4:选择第j个传感器组合Dj;
步骤5:将传感器组合Dj内雷达的测量值按其到达的先后顺序排列;
步骤6:按测量值到达先后次序,在其采样时刻根据获得的测量值按式(5)和式(6)对目标状态进行滤波,获得各个采样时刻下的目标状态和状态估计协方差矩阵;若某些传感器在某些时刻同时采样,则直接调用文献[13]中的分布式滤波融合算法进行融合。
步骤8:根据式(8)计算误差协方差矩阵ΔPj,并计算其特征值eij(ΔPj);
步骤9:判断误差协方差矩阵的最小特征值是否满足min(eij(ΔPj))>0,若满足则算法迭代停止,转步骤10;否则,令j=j+1,返回步骤4循环,直到j=2N-1,转步骤10;
步骤10:输出最优传感器组合,及其对应该组合下的目标状态估计值和协方差矩阵,算法结束。
3 仿真与分析
假设由3个独立的雷达构成的雷达网对一个匀速运动的目标进行单方向跟踪。目标运动状态目标,目标状态转移矩阵Φ,过程噪声为。
雷达1~3的开机时间分别为2 s、6 s、10 s,采样周期分别为2 s、3 s、4 s。融合中心的采样周期为12 s。假设3个雷达在线性量测下具有相同的测量矩阵:。目标状态初始值为;初始状态协方差矩阵P;3个雷达测量噪声分别为1 km,500 m,2 km。模拟跟踪时间为600 s,仿真结果为50次蒙特卡罗仿真均值。将本文算法与文献[10-11]中算法(记为算法1)进行比较,仿真结果如图3、图4和表1所示。
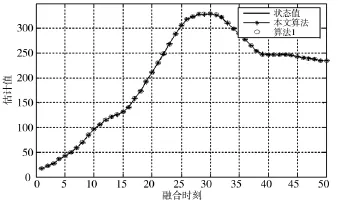
图3 两种算法的融合估计结果比较图
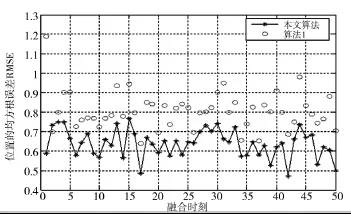
图4 两种算法的位置均方根误差曲线图
表1 两种算法的位置融合的均方根误差
由图3、图4和表1可知,在跟踪精度上,本文提出的算法的融合估计精度优于算法1。本文提出的算法的计算复杂度为O(N3n),算法1的计算复杂度为O(N3n3),本文算法在计算复杂度上明显低于算法1,且其计算效率要优于算法1。
由上述结果可以看出,本文提出的异步雷达组网协同跟踪性能要优于文献[10-11]提出的算法。在实际的异步雷达组网融合跟踪系统中,随着传感器个数的增加,这种算法的优势将体现得更加明显。
4 结论
本文针对雷达网中各传感器异步采样的实际情况,提出了基于异步顺序融合的动态传感器分配算法。该方法通过动态分配最优传感器控制目标的估计协方差在期望协方差的误差椭圆范围内,满足目标跟踪精度需求。对优化分配后的雷达量测采用先来先处理的原则进行顺序滤波,将整个融合算法的计算量分散在各个局部信息到达的时刻,避免了融合中心瞬时计算量过大。同时在每个测量时刻,基于当前全局信息对目标进行融合估计,实现在融合周期内的各采样点上都能对目标进行有效的跟踪,保证跟踪的实时性。该算法可以有效地解决异步雷达组网协同跟踪计算量大、实时性差的问题,在实际的多传感器融合系统中具有较强的实用价值。
[1]CHONG C Y,KUMAR S P.Sensor networks:evolution,opportunities and challenges[J].Proceedings of the IEEE. 2003,91(8):1247-1256.
[2]NASH J M.Optimal allocation of tracking resource[C]//Proceedings of IEEE Conference on Decision and Control,1977:1177-1180.
[3]HINTZ K J,MCINTYRE G A.Information instantiation in sensor management[C]//Proceeding of SPIE on Signal Processing,SensorFusion,andTargetRecognition,1998,3374:38-47.
[4]SCHMAEDEKE W.Information-based sensor management [C]//SPIE Proceedings,Signal Processing,Sensor Fusion,and Target Recognition II,Orlando,FL,1993:156-164.
[5]XU Y,TAN Y,LIAN Z,et al.An information theoretic ap-[6]HERO A O,D,CASTAňón D A,COCHRAN D,et al. Foundations and applications of sensor management[M]. United States:Springer Press,2008.
proach based Kullback-Leibler discrimination for multiple targets tracking[C]//International Conference on Information and Automation,2009:1129-1134.
[7]KALANDROS M.PAO L Y.Covariance control for multisensor systems[J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(4):1138-1157.
[8]KALANDROS M.Covariance control for sensor management in cluttered tracking environments[J].Journal of Guidance, Control,and Dynamics,2004,27(3):493-496.
[9]郭徽动,章新华.多传感器异步数据融合模型分析[J].火力与指挥控制,2003,28(3):9-11.
[10]高岚,田康生.一种基于协方差控制的异步数据融合方法[J].空军雷达学报,2006,20(4):12-30.
[11]田康生,高岚.一种基于异步数据融合的传感器管理方法[J].现代雷达,2008,30(7):42-45.
[12]彭东亮,叶军军,葛泉波.多传感器异步采样系统的顺序融合[J].信息与控制,2010,39(1):7-15.
[13]文成林,吕冰,葛泉波.一种基于分步式滤波的数据融合算法[J].电子学报,2004,32(8):1264-1267.
A Dynamic Sensor Allocation Algorithm for Collaborative Tracking in Asynchronous Radar Networks
YIN De-xing,ZUO Yan,GUO Bao-feng,GU Yu
(Fundamental Science on Communication Information Transmission and Fusion Technology Laboratory,Hangzhou Dianzi University,Hangzhou 310018,China)
A dynamic sensor allocation algorithm based on the sequential asynchronous fusion for collaborative tracking system in the asynchronous radar networks is proposed.The algorithm estimates the target states with the sequential filtering fusion of asynchronous sampling measurements and selects the optimal sensor sets based on the difference between the expected covariance and the filtering covariance dynamically.Simulation analysis show that the proposed algorithm has lower computational load and higher target tracking accuracy compared with the dynamic sensor allocation algorithm based on pseudo-measurements.
asynchronous radar network,collaborative tracking,sensor allocation,covariance control,sequential fusion
TN953
A
1002-0640(2016)07-0010-04
2015-06-15
2015-07-10
*
国家自然科学基金(61004119,61375011,61174024);国家“973”计划基金资助项目(2012CB821204)
尹德兴(1989-),男,山东日照人,硕士研究生。研究方向:传感器管理。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
航空发动机(2020年3期)2020-07-24
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13
电子制作(2019年9期)2019-05-30
计算机应用与软件(2019年2期)2019-04-01
电子制作(2018年16期)2018-09-26
经济研究导刊(2018年19期)2018-07-24
雷达学报(2017年3期)2018-01-19
考试周刊(2016年54期)2016-07-18