
用于武术擂台赛的仿人智能机器人设计
2016-09-06 08:55王择李响胡金鑫王浩冉李鑫刘赛赛
现代计算机 2016年19期
王择,李响,胡金鑫,王浩冉,李鑫,刘赛赛
(北京信息科技大学仪器科学与光电工程学院,北京 100192)
用于武术擂台赛的仿人智能机器人设计
王择,李响,胡金鑫,王浩冉,李鑫,刘赛赛
(北京信息科技大学仪器科学与光电工程学院,北京 100192)
搭建一台基于人体构造的擂台机器人,实现人体四肢的基础功能,可进行击打、弯曲等动作。行走部分基于轮子的差速控制。整体动作控制利用动作投影技术完成,其技术是基于对图像的识别处理,摄像头获取人的行为图像,经过单片机与电脑的计算转化为基础的位置坐标,达到对舵机以及电机的控制。最终达到擂台上上双方人员控制机器人进行互相击打或者击倒对方的竞技比赛效果。
仿人智能机器人;动作投影;机器人擂台
1 绪论
(1)引言
当今,机器人技术的发展迅速,为了促进智能机器人技术(尤其是自主识别、自主决策技术)的普及。开展本次大创课题,设计一个用于武术擂台赛的仿人智能机器人,机器人需要在规则范围内以自主进行互相搏击,并争取在比赛中获胜,以对抗性竞技的形式来推动相关机器人技术在大学生、青少年中的普及与发展。
(2)仿人机器人的发展历史
1910年,捷克斯洛伐克作家卡雷尔·恰佩克在其科幻小说中创造了“机器人”一词。
在此观点提出的40年内,对机器人的研究及成果都集中在理论或初级简单的形态上,与人们所需求或者说幻想中的还有一段差距。但是在1959年,制造出第一台可编程机器人的德沃尔与发明家约瑟夫英格博格合作制造出第一台工业机器人,这为日后机器人的发展方向打下了基础。
20世纪60年代中期开始,由于第二代传感器的出现,机器人开始向着人工智能进发。而这时,领先的欧美机器人方队的研究方向还是在大型工业化发展,却不知道日本的加藤一郎已经在仿人化方向取得了巨大成效。1969年,日本的加藤一郎实验室研发出第一台可双脚走路的机器人,这为机器人以后的发展提供了更多的选择方向。
此后20年间,个人计算机爆发式增长,机器人发展日渐成熟,为机器人的突破式发展提供了基础。
(3)仿人机器人的概念及研究背景
模仿人的形态和行为而设计制造的机器人就是仿人机器人,一般分别或同时具有仿人的四肢和头部。
由于仿人型机器人集机、电、材料、计算机、传感器、控制技术等多门学科于一体,是一个国家高科技实力和发展水平的重要标志,因此,世界发达国家都不惜投入巨资进行开发研究。在这个科技飞速发展的时代,机器人的技术创新发展影响着全世界每一个国家的经济生产,在这样一个大的研究背景下,我们需要对机器人的研究更加重视,为此开设本课题以了解机器人的简单构建。
(4)仿人机器人介绍
擂台赛投影比赛机器人由头部、上肢、手臂、运动底盘构成。
上肢手臂复现人的动作,实现对敌人的抱、抓、推等各种进攻动作,运动底盘可以实现灵活快速的前进、后退、原地转圈、运动转圈等动作。
比赛开始后,立体相机将识别到的人体肢体角度数据进行修正分析,转换成机器人肢体,底盘能识别的数据,通过计算机的蓝牙模块定时发送给机器人的控制器,控制器接收到数据信息后进行解析,然后驱动各个模块运动。
(5)仿人机器人赛种的由来
擂台赛投影比赛就是根据该电影内的机器人格斗比赛演变而来,本赛项所有内容由参赛队员控制机器人完成,机器人上半身控制的方式必须使用行为投射方式,即机器人的上肢必须复现操作人员的动作。机器人需要使用无线连接,不能与外界有任何缆线连接。控制系统由参赛队自行准备,控制系统中不能使用任何可以使用的传感器(装饰除外)。机器人不得使用除投影控制外的其他任何控制方式。本赛项所使用的场地与擂台赛场地相同。在擂台场地范围之外,距离擂台5m以内,会设置二个2m×3m的控制区域,该区域相互对称,在这个区域内操作队员能够直接看到擂台上的场景,然后通过投影的方式来控制机器人进行格斗。比赛的目标是要将擂台赛投影比赛打造为激情与活力并存,技术与创新兼顾的一项机器人比赛。
2 赛前设计内容及要求
本次设计的主要内容是设计一个符合 “机器人武术擂台赛项目竞赛规程”要求的机器人,能够完成检测自身位置、检测对手位置、检测自身姿态、检测擂台边缘,能够自己完成行走和攻击任务。
机器人必须具备几个明显的仿人类特征。
机器人身体部分需具备头部、躯干、四肢几个基本的人体特征,必须具备两个手臂(每个手臂不少于3个动力关节)。
机器人的底盘在场地上的投影尺寸不得超过240x240mm的正方形。
底盘:机器人放置于平面上,从地面向上,高150mm的这一部分称为底盘。底盘的侧壁必须垂直于场地表面,不允许斜面。
本组机器人在赛前需通过资格认证。认证方法为:机器人在赛前需将直径100mm、高300mm、重0.5kg的PVC圆柱体举起,以圆柱体离开地面10mm以上并保持5秒钟为准。每个机器人有三次尝试机会。如三次尝试失败,则取消该机器人参赛资格。
完整的机器人整体高度不低于400mm,重量不超过4kg,机器人的两条手臂肩关节顶部距地面的高度不低于300mm。
比赛过程中,机器人必须用手臂有效击打对方机器人,否则将被判负,并不再考虑其他得分点。对有效击打的认定按以下原则、以主裁判认定为准:
是主动的击打;手臂的某一部分需切实触碰到对方机器人;击打动作需有一定的动作幅度和力度;
比赛过程中,机器人总高度低于300mm的时间不能连续超过 5秒。
3 软件算法实现
(1)Kinect简要介绍
所谓动作投影,就是把人所做的动作投影到机器人身上,让机器人跟着你做动作。那么如何投影呢?就是利用Xbox360里的Kinect。Kinect是由微软开发,应用于 Xbox 360和 Xbox One主机的体感输入设备。Kinect系列设备,可以将人的动作投影到机器人身上,实现对机器人的控制,从而进行动作投影的比赛。Kinect就是一个3D摄像机,并且包括了许多强大的功能,诸如动态捕捉、麦克风输入、影像辨识、语音辨识等等。我们人体动作的识别,是依靠Kinect上面的两个功能强大的摄像头:RGB摄像头和深度摄像头来完成。
RGB摄像头:为Xbox 360提供红、绿、蓝三颜色通道,主要作用在于面部识别和动作追踪;
深度传感器:深度传感器有红外线投影机加单色CMOS传感器组成,虽然功能并不复杂,但它可以让Xbox 360真正“看到”3D空间,而不是通过计算得出空间数据。
Kinect关键基本组件如下(下图1):
①麦克风阵列;②红外投影机;③红外摄像头;④仰角控制马达;⑤USB线缆;⑥彩色摄像头。
(2)Kinect识别原理
Kinect骨架追踪处理流程的核心是一个无论周围环境的光照条件如何,都可以让Kinect感知世界的CMOS红外传感器。该传感器通过黑白光谱的方式来感知环境:纯黑代表无穷远,纯白代表无穷近。黑白间的灰色地带对应物体到传感器的物理距离。它收集视野范围内的每一点,并形成一幅代表周围环境的景深图像。接着,传感器会对景深图像进行像素评估,来辨别人体的不同部位,采用分割策略将人体从背景环境中分离,再通过人工智能系统处理大量的数据。最后得到20个关节点生成的一副骨架系统(如图3所示)。
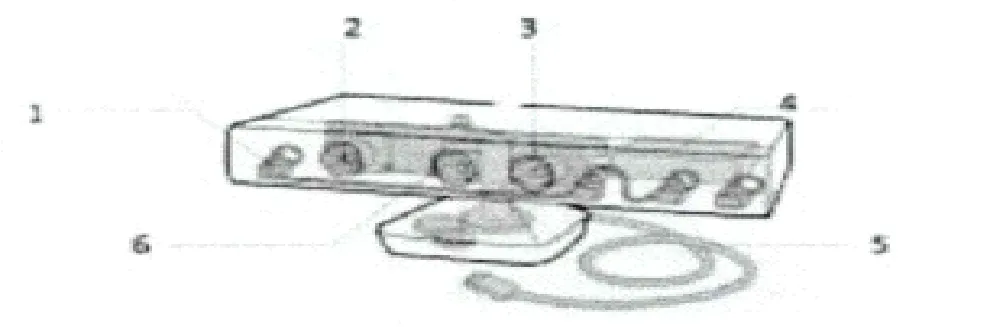
图1 Kinect产品透视图

图2 Kinect产品实体图

图3 kinect识别骨架图
(3)舵机编号软件
本次设计的仿人机器人共六个关节,使用六个舵机来实现肢体的控制,因为使用的是总线的连接,需要对被控制的电机进行编号区分,套件中使用带芯片控制的舵机,可以用RobotServoTerminal软件进行舵机编号的分配,这个软件不仅可以对舵机的编号(ID号),还可以对舵机的状态(包括速度、角度、温度、负载、电压)进行监控,可以设置舵机的中值位置等。

图4 舵机调试系统
4 控制系统
(1)STM32103VCT6控制器
STM32103VCT6@72MHz;外置RS-232串行接口2个;用户程序U盘模式、直接下载两种下载模式;机器人数字舵机接口(支持级联),6路通用TTL电平I/O输出端口,GND/+6V/SIG三线制;R/C通用模拟舵机接口;16路12位精度ADC复用的TTL电平输入端口(0-5V),GND/+5V/SIG三线制;4个用户可配置的按键输入;12路复用的用户可配置的外部中断输入,其中包括4路按键输入;具备蓝牙收发功能,波特率115200bps,支持用户自定义数据接收中断;具备Zig-Bee通信功能,波特率115200bps,支持使用串口命令对其操作;4个32位用户可支配的计时器,最小计时单位1us,支持用户自定义计时器中断;

图5 STM32103VCT6控制器
(2)控制器系统构成
四个驱动单元:Cortex-M3内核ICode总线 (I-bus),DCode总线(D-bus),和系统总线(S-bus)GP-DMA(通用DMA)。
三个被动单元-内部SRAM-内部闪存存储器-AHB到APB的桥(AHB2APBx),它连接所有的APB设备 这些都是通过一个多级的AHB总线构架相互连接的。
构成模型图如下图:
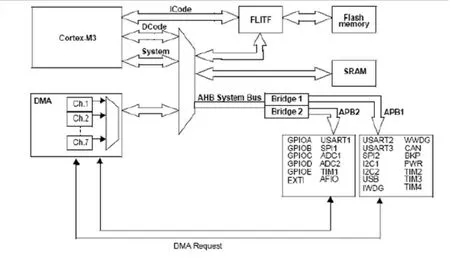
图6 控制器系统构成图
5 实战控制及规则
(1)控制策略
机器人的控制是由摄像头采集图像,经过电脑程序对图像的识别,生成12个人体关节数据坐标,通过对坐标的分析,分别对机器人的轮子、双臂的电机和舵机下达相应的指令。
前进后退及左右转的动作命令设置为:右腿向正前方前迈出约40cm,机器人向前以800(舵机中设置值,约为1.5m/s)的速度前进,右腿向后撤约30cm机器人向后以-800(舵机中设置值)的速度向后倒退。
左右转弯的控制策略定义为:右腿向右前方踢出约40cm,高约10cm左右,机器人向右以速度为800半径约3米向右前方前进。右腿向左前方踢出约40cm,高约10cm左右,机器人向左以速度为800半径约3米向左前方前进。
机器人双臂的控制模仿人的双臂位置,根据图像中获取人双臂位置的6个坐标,分别为肩、肘、手腕,对应机器人身上的6个舵机,每一个坐标对应舵机的一个角度值,通过人体双臂的坐标变化实现机器人双臂的仿人动作控制。
(2)实战场地介绍
机器人在比赛开始前可以放在离擂台中心500mm到1000mm的本方操作区,无需自主登上擂台。
比赛开始后,每一方只允许一名操作员进入操作区,另一名队员只能在裁判的允许的情况下进入场地扶机器。
本赛项所使用的场地与擂台赛场地相同。在擂台场地范围之外,距离擂台5m以内,会设置二个2m×3m的控制区域,该区域相互对称,在这个区域内操作队员能够直接看到擂台上的场景。

图7 比赛场地示意图
(3)实战规则
机器人身体部分需具备头部、躯干、四肢几个基本的人体特征,必须具备两个手臂(每个手臂不少于3个动力关节)。
机器人的底盘在场地上的投影尺寸不得超过240x240mm的正方形。
底盘:机器人放置于平面上,从地面向上,高150mm的这一部分称为底盘。底盘的侧壁必须垂直于场地表面,不允许斜面。
完整的机器人高度不低于350mm,比赛过程中的总高度也不得低于350mm,重量不超过3kg,机器人的两条手臂肩关节距离地面的高度不低于300mm。机器人上不能够有传感器。
(4)实战计分和胜负判定
①本赛项采用淘汰赛制,首轮由抽签第一名对阵最后一名,第二名对阵倒数第二名,以此类推,以后每轮对阵由上一轮决出的第一名对阵最后一名,第二名对阵倒数第二名,以此类推,如出现弃权或轮空时,对手可直接晋级,直至冠亚军决赛。
②机器人不得使用除投影控制外的其他任何控制方式。
③本赛项所使用的场地与擂台赛场地相同。在擂台场地范围之外,距离擂台5m以内,会设置二个2m× 3m的控制区域,该区域相互对称,在这个区域内操作队员能够直接看到擂台上的场景。
④比赛开始后,每一方只允许一名操作员进入操作区,另一名队员只能在裁判的允许的情况下进入场地扶机器。
⑤机器人在比赛开始前可以放在离擂台中心500mm到1000mm的本方操作区边,鸣哨后,机器人方可移动,如在鸣哨前机器人有移动位置的(移动位置由裁判判定),对方得一分。比赛过程中有一方机器人掉到擂台下的,对方得一分,掉到台下的机器人可以由本组的非操作员捡起重新放到比赛前规定放的区域,从掉下擂台开始,10秒内未能继续移动比赛(在擂台上开始移动视为能够继续比赛),对方得一分,之后继续读秒。如比赛过程中,如有一方倒在擂台上对方得5分,倒下后,站立的一方必须迅速远离倒下的机器人至少300mm远,不得干扰对方起来,干扰一次,对方得一分,倒下的一方如果在20秒内不能自行起来比赛,可由本方的非操作员将机器原地扶起继续比赛,对方再得1分。2分钟结束后,如果比分为平局,自动延长时间进入加时,直到一方倒下或者掉下擂台为止,结束比赛。
6 成品效果图

图8 成品图
[1]张东晴,陆忠燕,吉旭程.仿人机器人武术擂台赛中机器人的运动控制策略[J].电子技术与软件工程,2014,03:253-255.
[2]李靖意.基于Kinect深度图像人体动作识别研究[D].北京邮电大学,2015.
[3]刘飞.基于Kinect骨架信息的人体动作识别[D].东华大学,2014
[4]黄健聪.基于Kinect的骨骼动画技术研究[D].华南理工大学,2014.
[5]郝俊青.武术擂台赛机器人的设计策略[J].科技情报开发与经济,2009,09:124-126.
[6]尚华强.基于Kinect的虚拟人物动作仿真研究[D].杭州电子科技大学,2013.
Humanoid Robot;Motion Projection;Robot Challenge
Intelligent Humanoid Robot Designed for Martial Arts Contest
WANG Ze,LI Xiang,HU Jin-xin,WANG Hao-ran,LI Xin,LIU Sai-sai
(Instrument Science and Opto-Electronics Engineering,Beijing Information Science and Technology University,Beijing 100192)
Builds a platform robot based on the structure of the human body,to achieve the basic function of the limbs of the human body,beating and bending action.Differential speed control based on wheel.The overall motion control and motion projection technology is completed, the technology is based on the recognition and processing of the image,the camera gets people's behavior images,after the calculation of the single chip computer and computer into the base position coordinates,to achieve the steering gear and motor control.The ring on both sides ultimately control the robot for hitting each other or knockout competition effect.
1007-1423(2016)19-0054-06
10.3969/j.issn.1007-1423.2016.19.014
国家大学生创新项目、北京信息科技大学校课程建设-基于任务驱动机制的学教互动教学模式改革与实践(No. 2014KG18)
王择(1993-),男,北京房山人,本科,学生,研究方向为控制工程、电学
李响(1993-),男,北京崇文人,北本科,学生,研究方向为微处理器、电学
胡金鑫(1993-),男,北京通州人,本科,学生,研究方向为光电测试技术与系统、传感器系统与仪器
王浩冉(1994-),男,北京延庆人,本科,学生,研究方向为机械、电学
李鑫(1994-),男,北京通州人,本科,学生,研究方向为基于Kinect的识别机理
刘赛赛(1995-),男,山西临汾人,本科,学生,研究方向为光通信与光网络、激光科学与工程、电学
2015-12-15
2016-06-25
猜你喜欢
军事文摘(2022年8期)2022-05-25
商品与质量(2021年43期)2022-01-18
科普童话·百科探秘(2021年7期)2021-09-23
红楼梦学刊(2020年4期)2020-11-20
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
电子制作(2018年1期)2018-04-04
棋艺(2016年6期)2016-11-14
航空模型(2016年5期)2016-07-25
