
基于电流斩波的开关磁阻电机转矩脉动减小策略研究
2016-09-06 07:14杨明发
电气技术 2016年7期
杨 光 杨明发 赵 参
(福州大学电气工程与自动化学院,福州 350108)
基于电流斩波的开关磁阻电机转矩脉动减小策略研究
杨光杨明发赵参
(福州大学电气工程与自动化学院,福州 350108)
开关磁阻电机(Switched Reluctance Motor,SR电机)在起动和低速运行时通常采用电流斩波控制(CCC)方式,该控制方法具有简单直接、可控性好和开关损耗小的特点,但同时也存在转矩脉动较大的缺点。本文在传统的电流斩波控制方式基础上,设计了可以改变斩波限的滞环比较器,通过使电流波形优化来达到转矩脉动减小的目的。仿真结果证明了该方法的合理性、有效性,为实际SR电机电流斩波控制系统的设计和转矩脉动的减小提供了新的思路。
开关磁阻电机;电流斩波控制;滞环比较器;转矩脉动减小
开关磁阻电机(SRM)具有结构简单、成本低、效率高、调速性能好等一系列优点,广泛地应用于纺织、电动汽车、家用家电、矿山机械等领域[1]。但是SR电机的双凸级结构使得转矩和磁链是定子相电流和转子位置的非线性函数,无固定公式可循。因此,SR电动机分析和设计的主要问题是针对其内部磁场的非线性以及由非线性开关电源供电、相电流波形难以解析等有别于传统电动机的特点,探索SR电动机电磁转矩的分析和准确计算方法[2]。传统的控制方式如电流斩波控制、电压PWM控制和角度位置控制存在转矩脉动大的问题,而新型的直接转矩控制又因为电机转矩无法精确计算和测量而不能实际应用,因此,引入先进的控制策略是提高SR电机的动态性能和力能指标的关键[3]。文献[4]提出了一种基于RBF神经网络的开关磁阻电机角度优化控制方法,通过Matlab/Simulink设计了一个以转速和转矩作为输入、以最优关断角作为输出的RBF神经网络,实现了角度优化和减小脉动的目标。文献[5]采用了角度位置和电流斩波控制相结合的方式,在角度位置控制方式下利用单神经元PID来控制开通关断角,利用单神经元快速良好的自适应性来进行参数辨识,仿真表明其设计的调速系统能有效的控制电机的转速。文献[6-8]阐述了基于转矩分配函数法的开关磁阻电机转矩脉动抑制方法,给出了采用转矩闭环实现期望转矩跟踪的转矩脉动控制系统设计。本文在电流斩波控制的基础上,利用Sigmoid函数设计了电流斩波控制器,使得电流的斩波限随着转速的提升而逐渐缩小至理想稳定值,仿真和实验结果表明,该方法对于电流波形的优化和转矩脉动的减小效果明显。
1 SR电机电流斩波控制方式的分析
SR电机在基速以下运行时,常采用电流斩波控制方式,使电流在安全的幅度内,以避免过大的电流和磁链峰值,并使得转矩在较小的范围内波动,近似取得恒转矩机械特性。
传统的电流斩波控制方式是保持开通角和关断角不变,通过主开关器件的多次导通和关断,控制相电流保持在上限值和下限值之间,并以此控制转矩。传统的电流斩波控制方式下相电流的波形如图1所示。
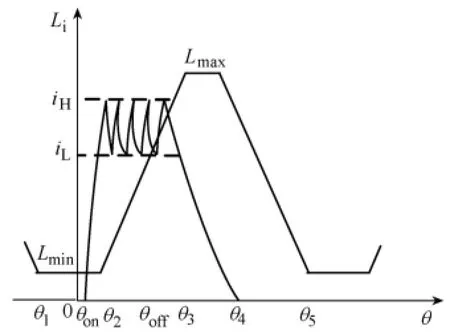
图1 传统的电流斩波控制方式下相电流波形SR电机单相电流产生的瞬时转矩可表示为

若不计磁路饱和的影响,即将设相绕组的电感与电流大小无关,这时相绕组电感随转子位置角θ周期性变化的规律可用图1说明。
SR电机线性模型所对应的相电感解析式可表示为
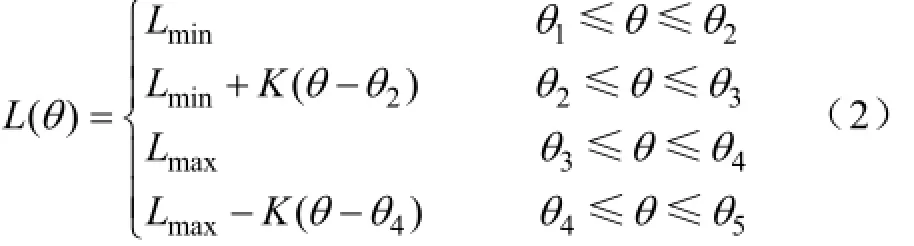
在1θ~2θ和3θ~4θ内,电感对θ 的导数为0,转矩为0;在2θ~3θ内,电感对θ 的导数为常数K,转矩与相电流的平方成正比。在低速运转时电流一般不会续流到电感下降区。因此根据式(1)可知SR电机的转矩受相电流影响很大,通过优化电流波形即可减小转矩脉动,提高电机机械特性。
传统的电流斩波的斩波限固定不变,电流会在上下限之间脉动,转速越低,斩波限越大,则单位时间内斩波次数越少,对控制电路的功率变换器要求也越高;斩波限越小则,电流脉动也越小,根据转矩式(1)可知转矩输出脉动也越小。因此,在起动初期,为满足大转矩起动的需要,在不过流的基础上将斩波限设置较大,随着转速的上升,逐渐减小斩波限,输出转矩也随之平稳。
2 基于Sigmoid函数的滞环比较器设计
在SR电机电流斩波控制系统中,由滞环比较器来控制斩波限的大小,斩波限的大小等于滞环的宽度。
本文设计了基于Sigmoid函数的滞环比较器,Sigmoid函数是一个在生物学中常见的S型的函数,也称为S形生长曲线。Sigmoid函数是一个良好的阈值函数,连续,光滑严格单调,关于(0,0.5)中心对称。由下式定义:

前8个Sigmoid函数的数值为:S0=0.50000,S1=0.73105,S2=0.88082,S3=0.95256,S4=0.98203,S5=0.99334,S6=0.99751,S7=0.99910,其中标准Sigmoid函数如图2所示。
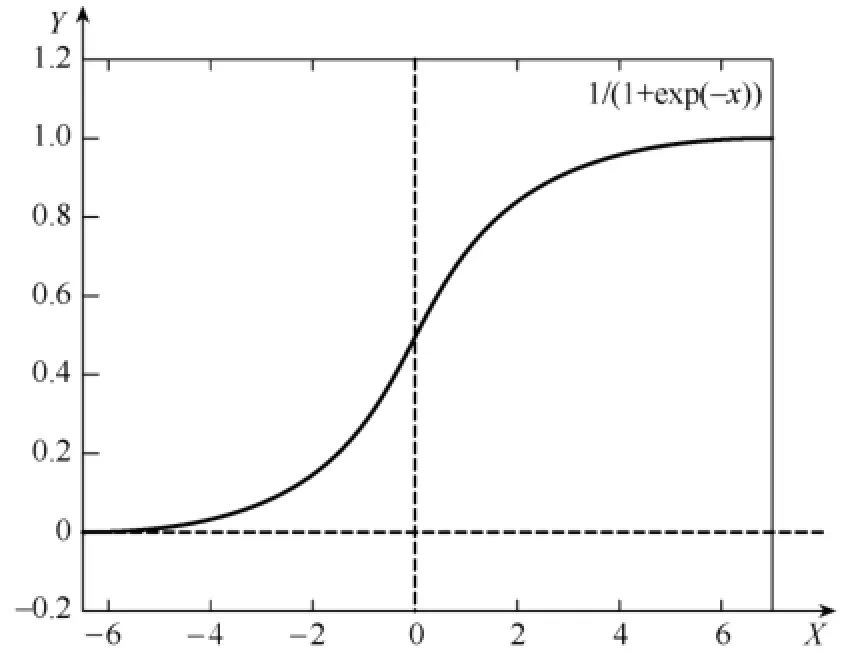
图2 Sigmoid函数
将额定转速ω 规范到[0,1],设额定转速为ω0,以ω/ω0作为Sigmoid复合函数的输入,函数的输出为斩波限的一半。如设刚起动时的斩波限为c(斩波限的最大值),则随转速ω提升而逐渐缩小的斩波宽度H可表达为
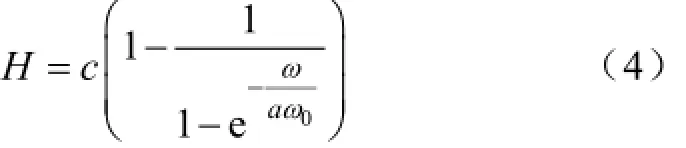
式中,a为小于1的常数,通过改变参数a可以优化额定转速时斩波限的宽度。图3为斩波限与转速和参数a的关系图,其中1>a1>a2>a3。由图可知,随着转速的提升,斩波限逐渐减小;参数a越小,则额定转速时的斩波限也越小。

图3 斩波限与转速和参数a的关系图
Sigmoid函数的连续光滑特性,使得斩波限和转矩连续平滑得过渡到理想值。刚起动时,斩波限较大,函数变化的斜率也较大,斩波限变化的速率大,加快反应速度;接近额定转速时斩波限变化的速率小,转矩平滑过渡。
3 仿真分析与实验
图4为仿真与实验结构框图,仿真电路包括PI速度控制器、滞环比较器、功率变换器、SR电机模型、CCC电路等几个部分。从图中可以看出,该方案结构简单,与传统的电流斩波控制硬件电路相比无须增加更多的器件。
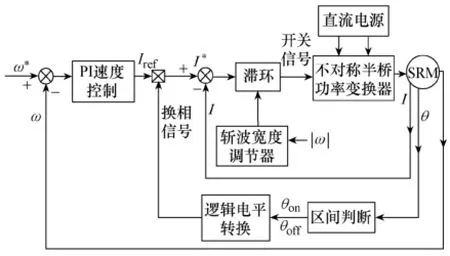
图4 仿真与实验结构框图
为了验证本文所述控制策略的正确性,在Matlab/ Simulink环境中进行了仿真实验。仿真实验参数为:定子电阻Rs=0.04Ω,转动惯量J=0.06kg·m·m,摩擦系F=0.02N·m·s,对称电感24e-4(H),不对称电感1.3e-2(H),最大电流3A,斩波限开始为1A,给定转速400r/min;电机空载起动,在0.1s时突加5N·m负载转矩,0.15s时恢复为空载。图5为仿真结构图。
图6和图7为本文控制方法与传统电流斩波控制方法的相电流仿真波形。图7和图8为本文控制方法与传统电流斩波控制方法下的合成转矩波形。

图5 仿真图
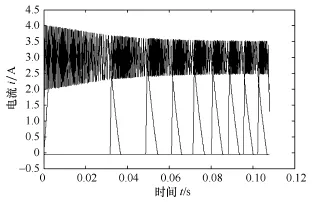
图6 本文控制方法的相电流波形

图7 传统控制方法的相电流波形
对比图6和图7可知,传统的电流斩波控制方式斩波限固定不变,在本文的控制方法中,刚起动时斩波限为2A,随着转速的的提升斩波限平滑得过渡到1A;对比图8和图9可知,传统的电流斩波控制方式下的转矩脉动幅度几乎不变,本文控制方法下的转矩脉动幅度随着转速的升高而逐渐减小。因此,本文所述的控制方法可以有效的减小开关磁阻电机在低速时的转矩脉动。
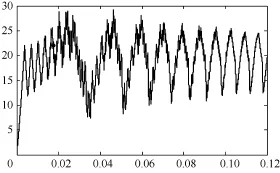
图8 本文控制方法的转矩波形
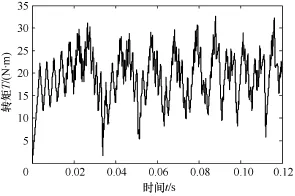
图9 传统控制方法的转矩波形
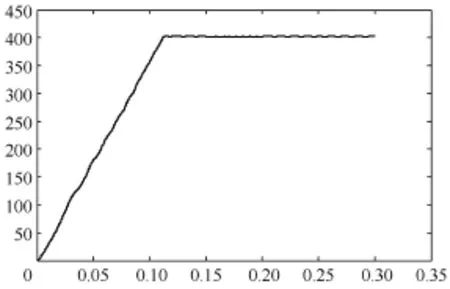
图10 转速曲线
4 结论
文中所论述的控制方法是经过Matlab仿真验证分析,并且是在理想情况下运行的,实际应用时还需要进一步验证。由于磁路结构复杂,SR电机振动、噪声分析及控制研究难度较大,减小转矩脉动是SR电机主要的研究发展方向。本文所提出的随着转速的升高而逐渐减小斩波限的控制方法,在一定程度上可以有效地减小SR电机在低速时的转矩脉动,仿真结果证明了其合理性和有效性,同时本文也为SR电机控制系统的设计和调试提供了新的思路。
[1] 吴建华. 开关磁阻电机设计与应用[M]. 北京: 机械工业出版社, 2000.
[2] 王宏华. 开关型磁阻电动机调速控制技术[M]. 北京:机械工业出版社, 1995.
[3] 陈昊. 开关磁阻调速电动机的原理·设计·应用[M].徐州: 中国矿业大学出版社, 2000.
[4] 陈灵. 基于开通、关断角度优化的开关磁阻电机控制策略的研究[D]. 长沙: 中南大学, 2010.
[5] 林浩, 李彩虹, 姚艳芝, 等. 基于单神经元PID的开关磁阻电机调速系统[J]. 微电机, 2014(11): 47-51.
[6] 郑洪涛, 陈新, 蒋静坪. 基于模糊神经网络开关磁阻电动机高性能转矩控制[J]. 控制理论与应用,2003, 20(4): 541-546.
[7] 张国宏, 蒋静坪, 葛宝明. 减小开关磁阻电动机低速时转矩脉动的新型控制策略[J]. 中小型电机,1999, 26(6): 22-26.
[8] 夏长亮, 陈自然, 李斌, 等. 基于RBF神经网络的开关磁阻电机瞬时转矩控制[J]. 中国电机工程学报,2006, 26(29): 127-132.
Torque Ripple Reduction of Switched Reluctance Motors based on Current Chopping Control
Yang Guang Yang Mingfa Zhao Can
(College of Electrical & Automation Engineering, Fuzhou University, Fuzhou 350108)
The current chopping control is usually applied to switched reluctance motor (SRM) in the starting and at low speed setting. However, it exists large torque ripple in this control system. Thus this paper designs a hysteresis comparator that could change the current limit which is based on the traditional current chopping control. It is aim to optimize sawtooth waveform and reduce the torque ripple by changing the width of the chopped current. The simulation results show that the proposed method is reasonable and effective, which provides a new thoughtway for the design of the current chopper control system and the reduction of torque ripple.
SRM; current chopping control; hysteresis comparator; torque ripple reduction
杨 光(1991-),男,河南省南阳市西峡人,在读硕士研究生,研究方向为电机电器及其系统智能化及在线监测技术。
猜你喜欢
大电机技术(2022年5期)2022-11-17
电工技术学报(2022年20期)2022-10-29
中国特种设备安全(2022年3期)2022-07-08
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
防爆电机(2021年4期)2021-07-28
时代人物(2019年29期)2019-11-25
电子制作(2018年19期)2018-11-14
客车技术与研究(2015年3期)2015-08-24
舰船科学技术(2015年8期)2015-02-27
