载人小行星着陆探测模式设想
2016-09-08 03:20武江凯白明生苟仲秋中国空间技术研究院载人航天总体部北京100094
航天器工程 2016年3期
武江凯 白明生 苟仲秋 闫 鑫(中国空间技术研究院载人航天总体部,北京 100094)
载人小行星着陆探测模式设想
武江凯白明生苟仲秋闫鑫
(中国空间技术研究院载人航天总体部,北京 100094)
基于目前小行星探测技术特点,综述了当前国内外空间活动中两种典型探测模式,针对未来载人小行星着陆探测需求,提出了爬行式和基于小型机动操作载人飞船的两种探测模式,并对两种模式进行评价比较,基于小型机动操作载人飞船的探测模式具有机动性强、探测范围广、安全性高及对航天员操作能力要求低等特点,可为我国未来载人深空探测任务中微重力环境下星体表面作业方案设计提供参考。
载人小行星探测;微重力;着陆探测;小型机动操作载人飞船
1 引言
小行星(Asteroid)是太阳系内类似行星环绕太阳运动,但体积和质量比行星小得多的天体。而近地小行星(Near Earth Asteroid,NEA)由于其运行轨道与地球相近,探测任务的规模和难度都相对较小,越来越成为载人深空探测的焦点。近年来主要航天国家竞相开展了小行星探测任务,截至目前,人类共发射了11艘无人探测器对小行星进行了探测[1],日本隼鸟号探测器于2005年11月12日着陆到小行星25143(Itokawa,1998 SF36),开始了人类首次对小行星的样品采集任务;2012年12月13日,我国嫦娥-2深空探测器完成了与图塔蒂斯(Toutatis)小行星的飞越探测;最近一次为美国黎明号探测器于2015年3月6日对谷神星开始的环绕探测,实现了人类对小行星带区域的首次探测。美国洛马公司“移民石”(Plymouth Rock)计划作为人类的第一个载人小行星探测计划,从一开始就备受关注,该计划将通过航天员对小行星的地质特性和人类对小行星环境的适应能力进行研究,寻找人类可利用的矿物资源,同时,将小行星作为登陆火星和其他行星的补给站,通过载人小行星探测提前验证未来载人深空探测的关键技术,为人类向更远的深空探测做技术储备和验证,“移民石”计划的提出,大大地加快了世界航天事业向载人小行星探测领域迈进的步伐[2]。
根据目前人类对小行星的认识和了解,小行星由于具有外形不规则、体积小、质量轻、转速慢等特点,能够提供的引力加速度几乎为零[3],航天员在其表面行走和作业将类似于太空漫游,面临着极高的风险,因此,有必要设计合理的着陆探测模式,以保证航天员安全地完成对小行星进行现场考察、科学仪器的布置、取样初步辨识等复杂的探测任务。
本文对载人小行星着陆探测任务特点进行了研究,对航天员舱外活动特点和难点进行了分析,根据小行星地质结构特点,提出了表面爬行和基于小型机动操作载人飞船两种载人小行星着陆探测模式的设想,旨在为未来载人小行星着陆探测提供参考。
2 舱外活动概述
为了更直接地进入空间、更深入地认识空间以及更有效地利用空间,自从第一艘载人飞船升空以来,人类便一直努力探索着太空这个未知的世界,1965年苏联航天员阿里克谢·列昂诺夫走出了上升2号飞船,是人类的第一次舱外活动(Extravehicular Activity,EVA),舱外活动定义见参考文献[4]。截至目前,人类从事的舱外活动主要可分为2类,轨道基舱外活动和星体表面基舱外活动[4]。
2.1轨道基舱外活动
所谓轨道基舱外活动是指出舱所处的场所为地球或其他天体附近的轨道上,到目前为止,已经进行的舱外活动中,绝大多数都是轨道基舱外活动,而且几乎都是在高300~600km范围的近地轨道上进行的,如“国际空间站”上航天员出舱进行维修、组装,航天飞机上航天员维修“哈勃望远镜”等。
在近地轨道空间,除了真空环境外,最突出的特殊条件就是失重,航天员和舱外活动中所使用的物体都处于失重状态。虽然失重环境因素消除了舱外航天服、操作对象以及航天员自身重量的影响,却大大增加了航天员空间移动和空间操作的难度,使航天员在舱外活动中消耗更多的体力和精力。为此,航天员必须通过双手借助航天器舱壁外的扶手等进行空间行走,或借助机动装置(如舱外机动单元、空间机械臂等)实现空间移动,操作维修期间必须依靠脚限位器、束缚带和助力装置来帮助固定身体,维持姿势和发力操作如图1所示。此外,在早期舱外活动中还须要通过安全系绳来保证航天员与母体探测器之间及工作场地之间的连接[4]。
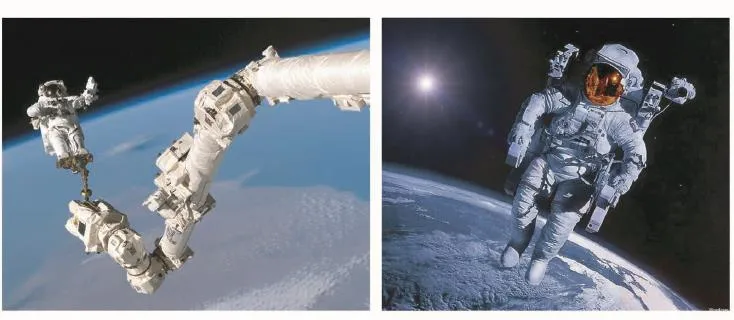
图1 近地轨道舱外活动Fig.1 Extravehicular activity in low earth orbit
由于受到地球磁场影响,近地轨道空间辐射水平和微流星体密度较低,航天员进行舱外活动时,可能受到的空间辐射和微流星体伤害的风险不是很高,因此轨道基舱外活动对舱外航天服的辐射防护和微流星体防护功能的要求并不高,如果考虑在远地轨道甚至更高的深空探测中进行舱外活动,则必须对舱外航天服的辐射防护和微流星体防护功能提出更高的要求。
2.2星体表面基舱外活动
1969年7月20日,美国的阿波罗11号飞船的登月舱在月球着陆,这是人类的首次地外星体表面基舱外活动,“阿波罗”计划载人月球探测任务中,先后6次共12人登上了月球,为人类地外星球探测提供了丰富的经验。
月球作为人类唯一到达的地外星球,月表重力相当于地球表面的1/6,因此,在月球表面进行舱外活动,航天服在提供环控生保能力、抵抗空间辐射和微流星体的同时,也给航天员带来了较大的重力负荷,质量约120kg的舱外航天服给舱外活动的航天员带来了沉重的体力负荷,使之难以适应在月表上长时间行走,而须要借助必要的工具,因此从阿波罗15号飞船开始,登月的美国航天员使用了“月球车”,使他们在月球上的活动范围扩大到数十千米,大大减轻了航天员的体力负荷,明显提高了航天员在月表上的舱外活动效率,如图2所示[5]。
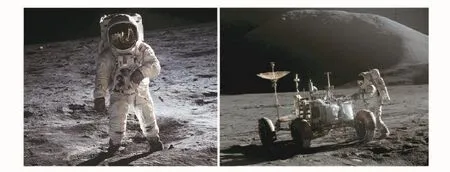
图2 月表舱外活动Fig.2 Extravehicular activity on surface of moon
3 载人小行星着陆探测模式设计
3.1载人小行星着陆探测特点
根据参考文献[6],载人小行星探测器脱离地球引力后,进入日心转移轨道,通过一次轨道机动,进入对小行星的伴飞轨道,向小行星表面投放信标机,建立与探测小行星的位置与姿态保持,通过航天员出舱,开展对小行星的探测[6]。
由于小行星星体表面重力加速度的大小与星体的质量及其直径直接相关。大多数小行星直径都小于100km,远远小于月球、地球和火星的直径,作为岩石质的天体,其质量也比月球小得多。因此,小行星上的引力几乎可以忽略不计,无法提供航天员正常行走需要的重力环境[7-8],同时,作为一个非合作的探测目标,小行星表面地理环境复杂,无法提供扶手、脚限位器等辅助行走设备。因此,除了须要为航天员配置常规的装置以外,还须要设计合理的着陆探测模式,确保航天员顺利安全地完成探测任务,本文以参考文献[6]中探测任务为例,开展了表面爬行和基于小型机动操作载人飞船的两种着陆探测方式设计研究。
3.2表面爬行模式
探测器在安全距离内,与小行星进行精控伴飞,在小行星自转轴方向10m处进行悬停,利用抛射器抛出着附网,并通过锚机构将网的4个角固定在小行星表面,航天员身着舱外航天服,并配置安全系绳与母体探测器连接,通过下降梯降至小行星表面,沿着附网爬行,完成科学设备布置、岩石采样等任务,为了防止因错误操作使航天员飘离小行星表面,出现危险状态,在移动过程中,须要通过安全挂钩保证航天员与着附网之间的可靠连接,如图3所示[2],由于着附网为柔性物质,在小行星表面的附着性比较强,探测结束后,着附网可多次重复使用。
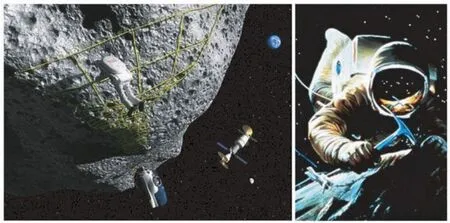
图3 表面爬行模式图示Fig.3 Crawl mode for extravehicular activity
3.3基于小型机动操作载人飞船的着陆探测
基于小型机动操作载人飞船的着陆探测思路,主要来源于早期轨道基舱外活动中的舱外机动单元,如图4所示,小型机动操作载人飞船(Small Maneuver Operational Manned Spacecraft,SMOMS)除具备载人飞船常规的环控生保、姿态与轨道控制、信息管理、热管理、电源电路、仪表显示和照明等功能以外,最大的特点是配置了小行星抓捕机械臂和任务操作机械臂,航天员乘坐在飞船内部,通过操纵两个机械臂实现对小行星抓捕功能和表面操作。
探测器飞往小行星过程中,小型机动载人飞船与母体探测器连接,由母体探测器进行统一控制,与小行星精控伴飞期间,首先对小型机动载人飞船功能状态进行检测,检测正常后,航天员身着舱内航天服从母体探测器进入小型机动载人飞船后,关闭舱门,再次由飞船进行功能自检,自检无误后,在航天员操纵下与探测器分离。
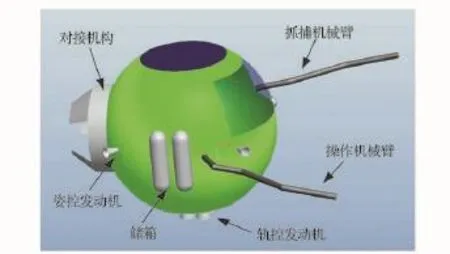
图4 小型机动操作载人飞船构型图Fig.4 Small maneuver operational manned spacecraft configuration
小型机动载人飞船通过姿轨控功能绕小行星自转轴公转,采用与小行星自转角速度相同的公转角速度,保持与小行星的近距离相对静止悬停,由两个机械臂协同完成复杂的探测任务,抓捕机械臂主要完成对小行星的抓捕和连接,二者形成刚性连接后,小型机动载人飞船姿轨控停控;表面操作机械臂是小行星探测任务的主要执行者,在航天员操作下,完成一系列的操作探测。任务完成后,与母体探测器对接,航天员返回母体探测器内,完成一次探测任务。
4 着陆探测模式评价与比较
4.1表面爬行模式
表面爬行模式中涉及的系统主要包括着附网系统和锚机构,系统规模简单、较小,可靠性较高;航天员在轨爬行动作,可通过在地面以及近地空间轨道上进行训练实现,爬行过程中,通过安全系绳等手段实现与着附网、目标星体之间的连接,故障情况下,通过与母体探测器之间的安全系绳返回,具有较高的安全性;表面爬行技术继承了当前轨道基舱外活动技术,可充分借鉴近地空间出舱维修和技术,继承性好;由于着附网面积以及失重条件下航天员体能限制,表面爬行模式的探测范围以及机动性将大打折扣,但航天员在小行星表面移动过程中,须要克服小行星自转运动带来的离心力作用,以及在科学任务期间操作反作用力对航天员的影响,表面爬行探测模式关键技术主要包括:
(1)精控伴飞与悬停技术:对非合作目标小行星的测量、交会、接近、伴飞及悬停控制技术;
(2)真空抛射与捕获技术,真空环境条件下,定向抛射着附网对小行星进行成功捕获技术;
(3)锚机构定位技术,在小行星表面着附过程中,锚机构(见图5)与小行星之间的刚性连接技术[9-11]。
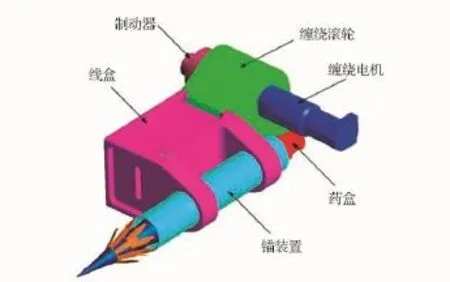
图5 锚机构示意图Fig.5 Anchor configuration
4.2基于小型机动操作载人飞船的探测模式
基于小型机动操作载人飞船的探测模式,可以使航天员灵活地往返于母体探测器与小行星之间,极大程度上减少了航天员在小行星表面爬行过程中的体力消耗和风险,同时由于利用推力器进行移动,机动性较强,且可扩大航天员探测范围。
小型机动操作载人飞船可基于目前较成熟的近地空间载人航天器进行改进设计,增加机械臂抓捕和操作功能,因此该探测模式具有较好的继承性。由于整个探测过程中都是由机械臂来完成具体操作,因此只需对航天员进行舱内遥操作技能训练。在完成所有探测任务之后,飞船与母体探测器进行交会对接,航天员回到母体探测器内,小型机动操作载人飞船还可以与母体探测器分离,继续留轨使用,对小行星进行精确轨道跟踪、引力和辐射环境测量,及完成航天员访问期间没有来得及完成的延续任务。
飞船轨控系统故障情况下,无法主动完成交会对接时,可作为被动目标,由母体探测器完成抓捕对接任务,基于小型机动操作载人飞船探测模式关键技术主要包括:
(1)小型机动操作载人飞船总体设计技术;
(2)精控伴飞与悬停技术,对非合作目标小行星的测量、交会、接近、伴飞以及悬停控制技术;
(3)非合作目标抓捕及组合体控制技术,对非合作目标小行星的抓捕过程中碰撞、冲击分析技术以及形成组合体后姿态控制技术;
(4)人机联合操作技术,对非合作目标小行星抓捕、操作过程中人机协同操作技术。
对两种着陆探测模式的比较见表1。
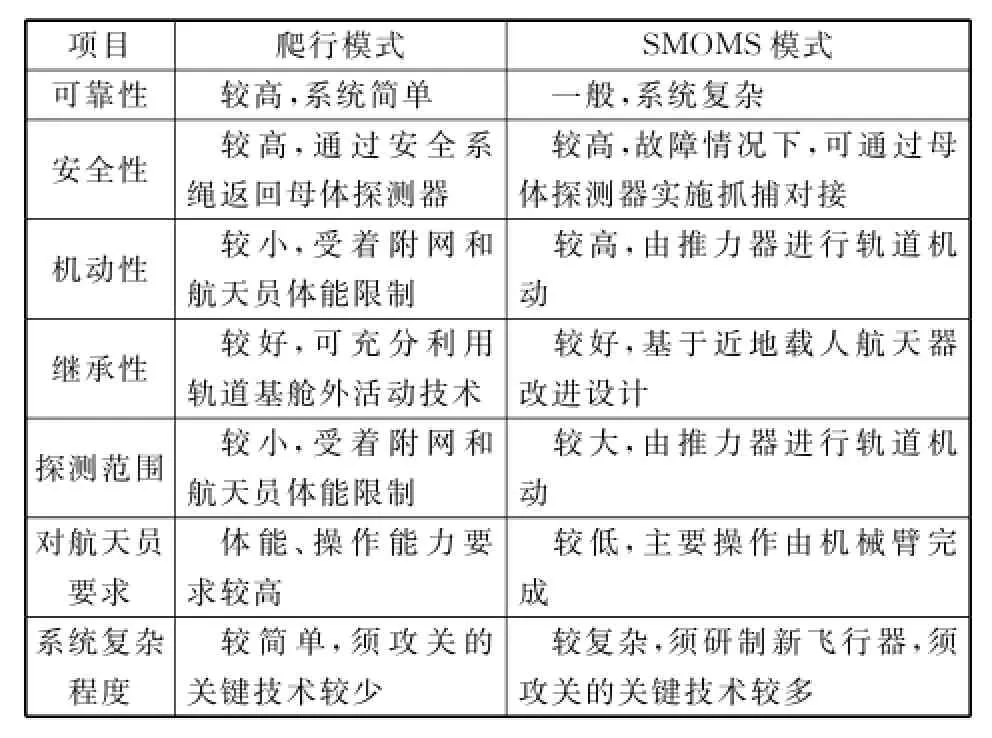
表1 两种着陆探测模式比较Table1 Comparison between two exploration modes
5 结束语
针对未来的载人小行星探测任务,根据小行星所处的环境条件及其表面特殊的物理特征,本文提出了表面爬行和基于小型机动操作载人飞船的2种着陆探测模式,分别对2种探测模式关键技术进行梳理和初步分析,对两种模式的优缺点进行比较分析,后续将重点对小型机动操作载人飞船系统进行方案研究。本研究可以为未来载人小行星着陆探测活动或其他微重力环境下表面作业方案提供参考。
(References)
[1]东方星.悄然兴起的小行星探测热潮[J].太空探索,2013(5):28-31 Dongfang Xing.Quiet rising of asteroid exploration upsurge,space exploration[J].2013(5):28-31(in Chinese)
[2]武江凯,白明生.美国“移民石”计划最新进展[J].国际太空,2013(7):38-44 Wu Jiangkai,Bai Mingsheng.The latest progress of American Plymouth Rock plan[J].Space International,2013(7):38-44(in Chinese)
[3]徐伟彪,赵海斌.小行星深空探测的科学意义和展望[J].地球科学进展,2005,20(11):1183-1190 Xu Weibiao,Zhao Haibin.Deep space exploration of asteroids:the science perspectives[J].Advances In Earth Science.2005,20(11):1183-1190(in Chinese)
[4]黄伟芬.航天员出舱活动概论[M].北京:国防工业出版社,2008Huang Weifen.An introduction of astronaut extravehicular activity[M].Beijing:National Defense Industry Press,2008(in Chinese)
[5]陈善广.航天员出舱活动技术[M].北京:中国宇航出版社,2007 Chen Shanguang.Technology for astronaut extravehicular activity[M].Beijing:China Astronautics Press,2007 (in Chinese)
[6]王开强,李志海,张柏楠.载人小行星探测的飞行模式[J].载人航天,2014,20(1):89-94 Wang Kaiqiang,Li Zhihai,Zhang Bainan,Mission mode of the human asteroid exploration[J].Manned Spaceflight.2014,20(1):89-94(in Chinese)
[7]朱恩涌.小行星表面取样技术分析[J].中国航天,2012 (2):32-35 Zhu Enyong.Technology analysis of sampling on asteroid[J].Aerospace China,2012(2):32-35(in Chinese)
[8]王开强,张柏楠,王悦.载人小行星探测的任务特点与实施途径探讨[J].航天器工程,2014,23(3):105-121 Wang Kaiqiang,Zhang Bainan,Wang Yue.Characters and technological approach of human asteroid exploration mission[J].Spacecraft Engineering,2014,23(3): 105-121(in Chinese)
[9]龚胜平,李俊峰,宝音贺西.小天体伴飞脉冲控制[J].中国空间科学技术,2013(3):15-21 Gong Shengping,Li Junfeng,Baoyin Hexi.Impulse control for spacecraft near asteroid[J].Chinese Space Science and Technology,2013(3):15-21(in Chinese)
[10]张伟.深空探测器总体技术[J].上海航天,2013,29 (6):1-6 Zhang Wei.General technology of deep-space probe [J].Aerospace Shanghai,2013,29(6):1-6(in Chinese)
[11]赵志军,赵京东.小行星探测器锚系统及其实验研究[J].南京航空航天大学学报,2013,45(4):461-466 Zhao Zhijun,Zhao Jingdong.Development and experimental analysis of anchoring system for asteroid lander [J].Journal of Nanjing University of Aeronautics& Astronautics,2013,45(4):461-466(in Chinese)
(编辑:李多)
Tentative Modes for Human Asteroid Landing Exploration
WU Jiangkai BAI Mingsheng GOU Zhongqiu YAN Xin
(Institute of Manned Space System Engineering,China Academy of Space Technology,Beijing 100094,China)
Based on the characteristic of asteroids exploration technology,the paper reviews two typical exploration modes.For the requirement of future human asteroid landing exploration,it puts forward crawl mode and small maneuver operational manned spacecraft based mode.Compared with the crawl mode,the small maneuver operational manned spacecraft based mode has higher maneuverability,wider explorative area,higher security and lower handle ability requirement for astronaut,which can provide future manned deep space explorations with a reference for manipulation on celestial body surface where is micro gravitation.
human asteroid exploration;micro gravitation;landing exploration;small maneuver operational manned spacecraft
V476.4
A
10.3969/j.issn.1673-8748.2016.03.017
2015-12-09;
2015-12-30
武江凯,男,工程师,从事载人航天器总体设计工作。Email:wjk1958@126.com。
猜你喜欢
今日农业(2022年2期)2022-11-16
军事文摘(2022年8期)2022-05-25
作文大王·低年级(2022年4期)2022-04-23
军事文摘(2020年24期)2020-02-06
军事文摘(2019年18期)2019-09-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
北京航空航天大学学报(2016年9期)2016-11-16
太空探索(2016年1期)2016-07-12
太空探索(2014年11期)2014-07-12