弧焊机器人离线编程研究
2016-09-19 01:39姜振平刘占起张文明沈阳大学机械工程学院沈阳110044
山东工业技术 2016年18期
姜振平,刘占起,张文明(沈阳大学机械工程学院,沈阳 110044)
弧焊机器人离线编程研究
姜振平,刘占起,张文明
(沈阳大学机械工程学院,沈阳 110044)
本文主要使用SolidWorks软件建三维马鞍形模型,然后将马鞍形模型导入到机器人离线编程系统中,拾取马鞍形轨迹并保存生成机器人识别的语言,最终使用新松机器人离线编程系统进行仿真,其仿真结果符合实际要求。
SolidWorks建模;机器人;马鞍形;离线编程;运动仿真
0 引言
随着工业化的发展,自动化和智能化控制成为了发展趋势。目前,国内工厂使用的机器人大多是示教编程,很少使用离线编程,所以,限制了工业自动化水平。因为马鞍形曲线复杂,焊接时容易出现缺陷而且对焊工的要求也比较高,没有达到自动化水平。为了解决这一难题,本文使用了SolidWorks软件进行建模,建立马鞍形的三维模型,使用机器人离线的方式进行编程,最终对于复杂的马鞍形焊缝的焊接达到自动化要求。
1 马鞍形模型的建立
试验参数选用,使用管的材质为低碳钢,其主管管直径为220mm,长度为380mm,厚度为5mm。支管直径为120mm,长度为190mm。选择好参数后,打开Solidworks软件[1],其画图步骤为:
(1)新建文件,点击新建草图图标,以XY坐标为基准面;
(2)点击画圆图标命令,画出直径为220mm圆,再次点击圆命令再画一个直径为219.8mm的圆。然后点击特征命令,从特征命令中选择拉伸命令,设置拉伸长度为380mm,点击确定;
(3)在建一个草图,以XY为基础面后确定;
(4)点击圆命令,捕捉主管中点并画出直径为120mm的圆,再次点击圆命令画一个直径为119.8mm的圆。然后点击特征命令,从特征命令中选择拉伸命令,设置拉伸长度为300mm。
(5)保持为*.STL格式的文件。
2 机器人坐标系的设定
2.1工具坐标系的设定
(1)将待标定工件放到工作台上用夹具夹好,打开机器人电源,使用示教盒对标定点进行五点标定法;
(2)使用示教盒调整机器人姿态[2],使机器人到达标定点并设此点为第一标定点,在次调整机器人姿态,要使机器人姿态和第一点姿态不同并设为第二点,依此类推,设置第三点,第四点,第五点结束并退出;
(3)将设置好的工具坐标系记录,其坐标值如图1所示。
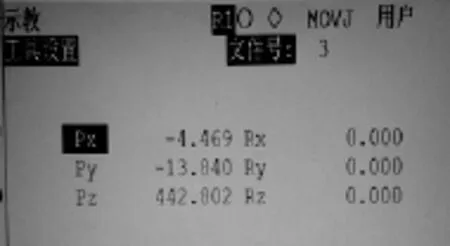
图1 工具坐标值图
2.2工件坐标系的设定
(1)打开用户坐标系设置命令,选定工作台的一角为工件坐标系的原点;
(2)使用示教盒调节机器人到达原点并设此点为工件坐标系的原点。在工作台的一边选定一点作为X轴,垂直X轴的为Y轴,Z轴由右手定则确定,然后退出。
(3)将设置好的工件坐标系记录,其坐标值如图2所示。

图2 工件坐标值图
3 在SR_CAM_SOFTWARE(新松机器人软件)中离线仿真
将上述马鞍形模型进行模拟仿真,其过程如下:
(1)打开SR_CAM_SOFTWARE软件[3],点击打开按钮选择上述马鞍形三维图,在点击加工按钮,在加工按钮中选择边界选取按钮,识别出马鞍形轨迹,将马鞍形轨迹保存为*.txt文件格式;(2)新建一个机器人工作站并导入机器人模型,设置上述工具、工件坐标系参数;(3)点击加载核心数据,将*.txt文件加载到机器人工作空间中;(4)配置轨迹点,将配置后的点全部选中进行仿真运行,其运行状况符合实际要求。其仿真效果如图3所示。
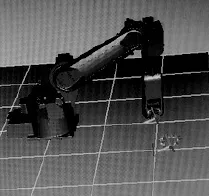
图3 仿真运行图
(5)最后将文件保存,可用于网络远程控制应用。
4 试验结论
本文通过使用SolidWorks软件画出马鞍形的三维图形,以SR_ CAM_SOFTWARE为主要的编程设计界面,经过试验,其仿真结果达到要求。该过程自动化程度高,焊接时精度也非常高并且可以提高焊接效率[4],另外还能提高对焊接工人的工作环境和减少对焊接工人健康的伤害。最后,希望工厂能够快速实现焊接自动化。
[1]尚雪梅,康颜青.SolidWorks建模技术在工程制图教学中的应用[J].装备制造技术,2013(09):209-210.
[2]CSC_V2.3新松工业机器人通用操作手册[Z].
[3]SR_CAM_SoftWare用户操作手册[Z].
[4]吴德勇,刘少林,王锦夏.马鞍形空间曲线自动焊接设备的研制[J].电焊机,2014,44(10):39-43.
10.16640/j.cnki.37-1222/t.2016.18.229
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
电脑知识与技术(2022年15期)2022-07-02
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
智能制造(2021年4期)2021-11-04
电脑爱好者(2021年18期)2021-09-23
防爆电机(2021年4期)2021-07-28
电脑爱好者(2020年23期)2020-12-30
杭州电子科技大学学报(自然科学版)(2020年3期)2020-06-08
网络安全和信息化(2019年1期)2019-12-22
军营文化天地(2018年2期)2018-04-20