
基于PID神经网络的智能车追逐控制系统研究
2016-09-23 03:11张桐铭刘延飞赵鹏涛田琦
科技与创新 2016年15期
张桐铭+刘延飞+赵鹏涛+田琦
摘 要:针对智能车竞赛中新提出的双车追逐问题,提出了一种基于自适应控制的追逐速度控制系统,将PID神经网络控制方法应用于智能车的调速系统中。PID神经网络控制系统不依赖智能车的数学模型,能够自适应地根据实际情况调整神经元的权值,最终优化了智能车速度的控制效果。测试结果表明,PID神经网络控制器相比于传统的PID控制器具有响应快、超调小、无静态误差等优点,明显提高了智能车速度控制系统的性能。
关键词:PID神经网络;智能车;双车追逐;速度控制
中图分类号:TP183 文献标识码:A DOI:10.15913/j.cnki.kjycx.2016.15.013
智能车系统以迅猛发展的汽车电子为背景,涵盖了自动控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科,主要由路径识别、转角控制及车速控制等功能模块组成。PID神经网络(Proportion-Integral-Derivative Neural Network,PIDNN),是一种多层前向神经网络,基于PIDNN的控制系统是一种基于连接机制的智能控制系统。与传统的控制理论相比,PIDNN控制器对于复杂的环境和任务有更好的适应性。
双车追逐,即两辆智能车同时运行的行驶方式,两辆智能车之间没有有形的物理连接,要求两辆车不能发生碰撞和接触,且辆车要尽量靠近,以提高车辆运行的效率。在日常生活中,当道路较为拥挤时的车辆行驶就是类似的问题。因此,研究双车追逐问题对于智能车辆的安全行驶有着重要的意义。
1 智能车设计
1.1 智能车总体设计
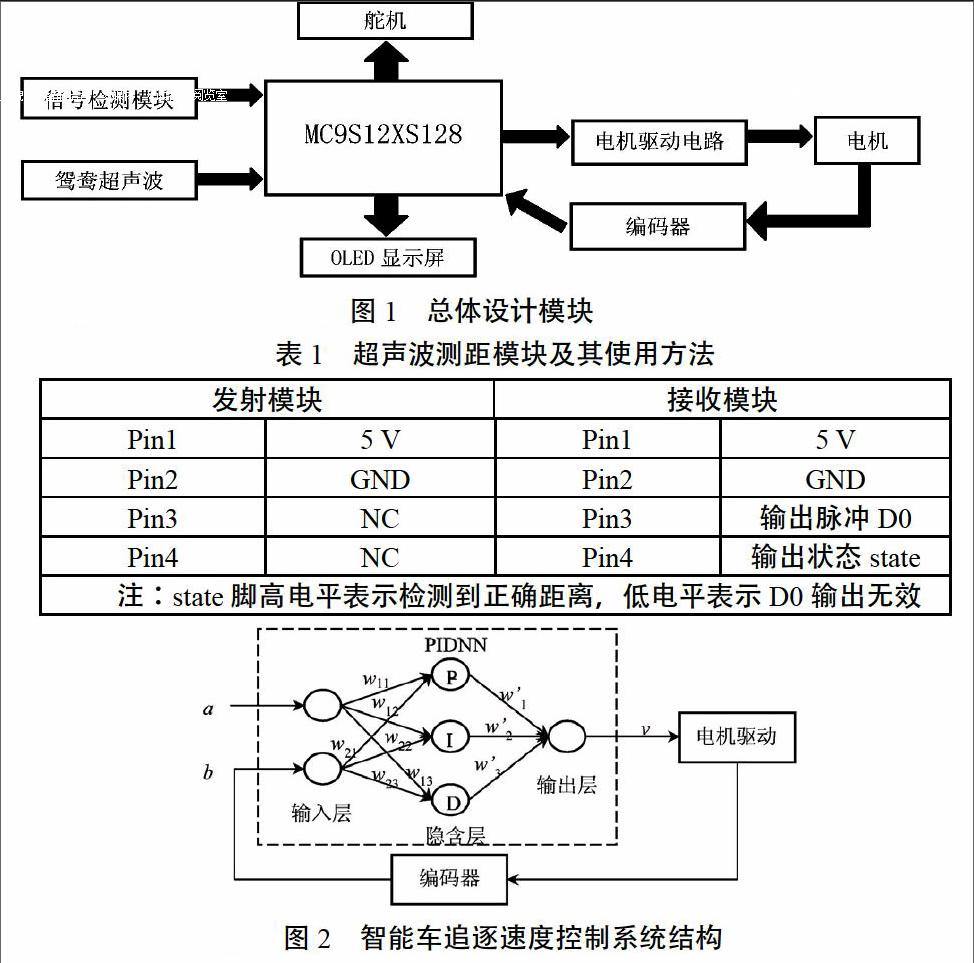
智能车前端安装有磁信号传感器,由其将采集的信号送至信号处理电路进行滤波、放大,之后单片机通过AD端口采样,获取路径检测模块信息并计算分析,根据旋转编码器反馈回来的实际车速对电机进行控制。总体模块设计如图1所示。
1.2 编码器测速装置
编码器、霍尔传感器、光电传感器、测速电机是常见的四种测速装置。根据不同的测速精度要求,经过多次选型测试后,设计选用欧姆龙出品的200线编码器测速。使用这种编码器足够满足精度需求,并且输出为数字接口,输出测速脉冲,可供单片机采用,获得实际速度值。
1.3 两车通讯模块
根据赛道情况,设计选择采用的“鸳鸯”超声波测距模块如表1所示。该组传感器分为发射和接收两个模块,前车搭载发射模块,后车搭载接收模块。检测角度大于90°。两车之间距离为d,发射和接受信号脉宽为w,则有:d=w×340 m/s,主要连接方式见表1.
2 追逐速度PIDNN控制系统设计
智能车主要由主板、单片机、传感器、舵机、电源模块、电机驱动等部分组成。电机控制为智能车追逐速度控制的实现方式。智能车电机转速的快慢主要由单片机输出的占空比大小决定。当超声波测距模块测出两车距离较远时,电机驱动信号的占空比增大,后方智能车加速;反之,当两车距离较近时,电机驱动信号的占空比减小,后方智能车减速。电机从执行指令到响应输出需要一定的时间,而且智能车本身又具有一定的惯性,使得小车在速度调解过程中存在一定的滞后。因此,PIDNN控制器作为一种超调小、无静差、响应时间短的控制器,可以很好地解决以上问题。 2.1 追逐速度PIDNN控制系统的结构
在构成控制系统时,PIDNN和被控对象是一种串联关系,PIDNN的输入作为速度期望值和实际速度,PIDNN的输出作为控制量传递给被控对象。智能车追逐速度控制系统如图2所示。
PIDNN控制器是一个三层前向网络,为2×3×1结构,它的输入层有2个神经元,分别接收电机目标速度的给定值a和实际速度b;它的隐含层有3个神经元,分别为比例元P、积分元I和微分元D;输出层完成隐含层神经元信息的综合。网络的输出v作为控制量传递给电机驱动,智能车的实际速度b通过编码器测出并反馈回神经网络的输入层。
2.2 PIDNN控制器的前向计算方法
PIDNN控制器的核心在于隐含层的状态函数形式,下面主要介绍隐含层的状态函数和输出函数。
隐含层含有3个神经元,分别为比例元、积分元和微分元,它们各自的输入总值均为:
隐含层各神经元的状态函数分别为比例函数、积分函数和微分函数,用以实现传统PID控制器中的比例、积分和微分环节的作用。
2.3 PIDNN控制器的反传学习计算方法
追逐速度PIDNN控制器的反传学习即BP(误差反向传播)学习算法,主要完成在线学习,从而修改网络权值。
本设计中,网络连接权重值的调整基于目标速度和实际速度的偏差。可将PIDNN控制器和被控对象看作一个整体,即一个具有更多层数的神经元网络。网络的最后一层对应于被控对象(电机驱动),是未知的,因此整体神经网络的性能指标定义为:
3 实验验证
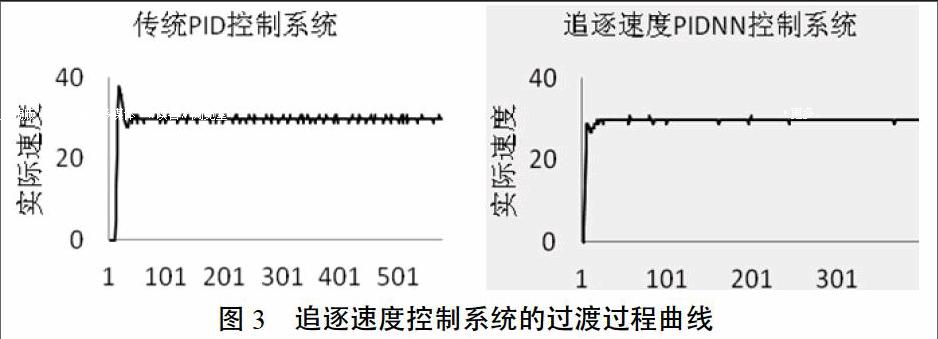
我们利用实际制作的智能车进行了对照实验,图3(左)是运用传统PID控制器设计的追逐速度控制系统的过渡过程曲线,图3(右)是运用PIDNN控制器设计的追逐速度控制系统的过渡过程曲线。
从图3中可以看出,传统PID控制器即使经过烦琐的参数整定,系统输出还存在很大超调,但经过PIDNN的自学习和调整,系统输出响应超调小,静差小,响应速度很快。
4 结论
本文根据PIDNN的控制原理,设计了一种基于PIDNN的智能车追逐速度控制系统,并结合功能描述,详细地阐述了其硬件工作方式。经过周密的理论验证,给出了追逐速度PIDNN控制系统的结构形式及计算方法。实验表明,基于PID神经网络的智能车追逐速度控制系统相比于传统PID控制系统,具有更好的鲁棒性、控制精度以及更好的控制效果,具有一定的推广价值。
参考文献
[1]郑怡,王能才.改进的单神经元自适应PID控制算法在智能车速度控制系统中的研究与应用[J].自动化表,2015,185(3):98-99.
[2]赵国柱,赵悦如.用于智能车速度控制的PID程序设计[J].中国西部科技,2015,308(3):28-29.
[3]吴隆东,姚齐国.基于K60芯片的双电磁车追逐运动的设计[J].中国水运,2015,11:72-73.
[4]卢萍,金朝永.基于PID神经元网络的研究和改进[J].自动化仪表,2012,33(8):51-54.
[5]袁朝晖,张慧.多温区电加热炉的PID神经网络控制[J].武汉理工大学学报,2002,24(3):21-23.
〔编辑:刘晓芳〕
