
ECDIS外接传感器信号模拟
2016-10-11 12:18杜一村杨家轩赵梁滨
中国航海 2016年1期
杜一村, 杨家轩, 赵梁滨
(1.大连海事大学 航海学院, 辽宁 大连 116026;2.辽宁省航海安全保障重点实验室, 辽宁 大连 116026)
ECDIS外接传感器信号模拟
杜一村1,2, 杨家轩1,2, 赵梁滨1,2
(1.大连海事大学 航海学院, 辽宁 大连 116026;2.辽宁省航海安全保障重点实验室, 辽宁 大连 116026)
为提高电子海图显示与信息系统(Electronic Chart Display and Information System,ECDIS)实操培训的质量,减少资源浪费,提出利用ECDIS实船系统进行实操培训。由现场可编程门阵列(Field Programmable Gate Array,FPGA)作为主控制器,对已设定的船舶初始数据进行运算和封装,完成传感器信号的模拟,并添加相应的按键操作,实时控制船舶航向和航速。根据相关传输协议,通过串口将相关数据分别发送至ECDIS的相应传感器接口,使ECDIS实船系统正常工作,这样便模拟出船舶海上航行的情况。经初步测试,证明该方法可行,可进一步拓展和完善,以全面应用到ECDIS实操培训中。
水路运输;ECDIS培训;现场可编程门阵列;传感器信号;传输协议
Abstract: In order to improve the quality of training and save resources, the operation training of ECDIS are proposed to be conducted on available marine ECDIS equipment. The exterior sensors for the ECDIS to work are simulated by the circuits based on Field Programmable Gate Array (FPGA), which perform data computing and packaging as well as panel controlling. The ship course and speed can be set on the panel and transmitted to the ECDIS equipment via serial ports in required transport protocols. The scheme has been tried out and welcomed.
Keywords: waterway transportation; ECDIS training; FPGA; sensors signal; transport protocol
2010年通过的“STCW公约马尼拉修正案”就电子海图显示与信息系统(Electronic Chart Display and Information System,ECDIS)的应用作出了说明。对此,我国海事局于2012年发布《关于做好STCW公约马尼拉修正案履约准备工作有关事项的通知》(海船员〔2011〕923号),明确ECDIS适任培训场地、设施、设备标准和教学人员的要求,强制要求培训单位至少配备一套ECDIS实船系统且该系统必须通过ECDIS类型的认证,符合IEC 61174标准。[1-2]
随着国际海事组织(International Maritime Organization,IMO)发布电子海图使用规范,电子海图的培训和考核开始成为各航海院校的研究内容。因此,对ECDIS实操培训系统的设计和改进及资源的合理利用进行研究是具有理论和实践价值的课题。[3-4]
1 ECDIS实操培训系统的现状
根据我国海事局的最新规定,在进行ECDIS实操培训时必须配备实船系统。因为单一的电子海图系统无法显示船舶信息,只有接入传感器信号后才能真正发挥教学作用,否则ECDIS就只是简单的电子海图显示平台,无法发挥其信息系统的作用。但是,由于传感器设备的价格较为昂贵,一些培训单位
可能因经费受限而无法及时购置。此外,即使传感器设备都已配置好,电子海图可以工作,仍存在本船位置固定(即GPS天线位置固定)、航速为零等问题,使得电子海图上只能显示一个固定的船位,无法模拟航行,因此还是起不到实操培训的作用。
另一种方法是单纯使用模拟器进行实操培训,目前已有较为成熟、实用性较强的培训系统(如大连海事大学、上海海事大学和船商公司等),这些系统一般以计算机为平台,由教练台向学员机发送数据,然后学员进行模拟航行。系统中有车钟和舵的操作面板可对航速和航向进行控制,效果与实际情况相似,画面真实、成本较低,可基本完成相关实操培训。但是,这些模拟器是单独工作的,很少与实船系统连接,这样ECDIS实船系统就起不到实际作用;同时,模拟器毕竟不是真实设备,一些功能可能无法有效模拟出来。此外,设备的硬件检查和日常维护也是模拟器无法实现的。
通过对电子海图实船系统和电子海图模拟器进行比较分析可知,电子海图模拟器虽然有缺陷,但能达到ECDIS实操培训的目的。为进一步提高培训质量,并有效利用资源,将实船系统与模拟器相结合,实现互联,这样更接近实际航行情况,培训效果也将得到较大提升。设计的主要思路为:PC机通过串口发送船舶相关参数至信号发生器现场可编程门列(Field Programmable Gate Array,FPGA),由FPGA进行运算并将其转化为标准格式的航向、航速、GPS和AIS等信息语句;然后对数据进行分类,并将其发送至ECDIS相应传感器接口,即可模拟真实传感器的数据,并在ECDIS实船系统上显示船舶信息;同时,添加一些按键即可对船舶航行进行实时操作,实现实船系统与模拟器的结合,更好地完成ECDIS培训。
2 ECDIS实船系统识别的传感器数据格式
ECDIS实船系统可接收的传感器信号主要来自于电子定位系统(GPS,北斗等),罗经,ARPA,计程仪,AIS,测深仪及风速风向仪。这些信号均符合IEC 61162协议(该协议是国际电工委员会为方便船舶设备进行数据交换和共享制定的一种与美国航海电子协会的NMEA 0183标准兼容的协议,现已国际通用,包含计程仪、测深仪、罗经方位系统、GPS及AIS等多种接口和通信协议定义)。
IEC 61162协议是单个发话器和多个收话器的标准,规定了硬件电气特性、数据传输、数据格式和数据内容。硬件上采用与RS422/RS485兼容的电气规范,数据传输采用异步串行方式,4 800 Bite/s或38 400 Bite/s的波特率,8位数据位,1位停止位,无奇偶校验位。数据传输过程中以语句为一个意义单位,每条语句以“$”或“!”开始,后面是语句头。语句头由5个字母组成:前2个字母表示“系统ID”,即表示该语句是属于何种系统或设备;后3个字母表示“语句ID”,表示该语句是哪方面的数据。语句头后为数据体,包含不同的数据体字段;语句末尾为检验码,代表“$”与“*”或“!”与“*”之间所有的ASCII码数据相异或的结果(不包括这2个字符)。语句以回车换行符
2.1GPS数据
标准格式为:$GPGLL,<1>,<2>,<3>,<4>,<5>,<6>*hh
2.2罗经数据
标准格式为:$HEHDT,<1>,<2>*hh
2.3ARPA数据
标准格式为:$RATTM,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>*hh
2.4计程仪数据
标准格式为:$VDVBW,<1>,<2>,<3>,<4>,<5>,<6>*hh
2.5AIS数据
标准格式为:!AIVDM,<1>,<2>,<3>,<4>,<5>,<6>*hh
2.6测深仪数据
标准格式为:$SDDBT,<1>,<2>,<3>,<4>,<5>,<6>*hh
2.7风速风向仪数据
标准格式为:$WIMWV,<1>,<2>,<3>,<4>,<5>*hh
3 信号发生平台的设计与实现
产品设计框架见图1。
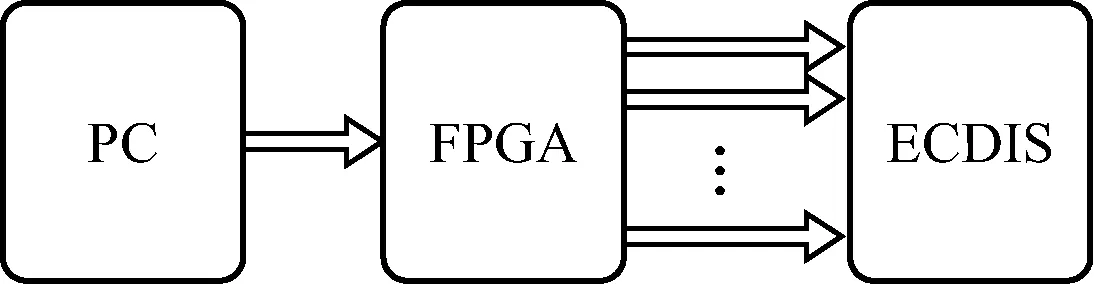
图1 产品设计框架
先由PC机通过串口发送船舶相关数据至FPGA,进行参数交互;然后FPGA进行数据运算、封装和分类;最后发送至ECDIS相应的传感器接口,实现模拟航行的功能。
3.1初始数据设置
船舶的初始数据信息由PC机通过串口发送至信号发生器。在PC机上利用VC++制作基于MFC(Microsoft Foundation Classes)的对话框,用以发送船舶的初始位置、初始航向和航速。用于发送船舶初始数据的软件界面见图2。

图2 用于发送船舶初始数据的软件界面
3.2信号发生器
该信号发生器是基于FPGA设计的。FPGA作为专用集成电路(ASIC)领域中的一种半定制电路出现,不仅可以弥补定制电路的不足,而且可以消除原有可编程器件门电路数有限的缺点。
试验采用ALTERA公司的CycloneII系列FPGA开发板作为信号发生器,通过嵌入式设计添加许多串口,并设计数据运算、封装和分类功能。信号发生器对从PC机上获取的船舶初始数据进行运算处理,然后实时发送信号至ECDIS实船系统的各个传感器接口,使ECDIS正常工作,实现对模拟船舶的实时监控。设计流程如下。
1) 通过SOPC Builder建立NIOSII处理器系统,添加CLOCK,NIOSII处理器,SDRAM控制器,EPCS控制器,SYSTEM ID,JTAG(Joint Test Action Group) UART和UART等组件;随后配置并编译。[9]SOPC添加组件见图3。
(1) CLOCK:提供时钟信号。
(2) NIOSII处理器:Altera公司推出的一个32位精简指令集处理器软核。
(3) SDRAM控制器:提供一个简单的Avalon接口,与片外的SDRAM沟通,支持8位、16位、32位和64位数据宽度。
(4) EPCS控制器:串行存贮器,NiosII 不能直接从中执行程序,实际执行的是EPCS控制器片内ROM中的代码,把EPCS中的程序搬到RAM中执行。
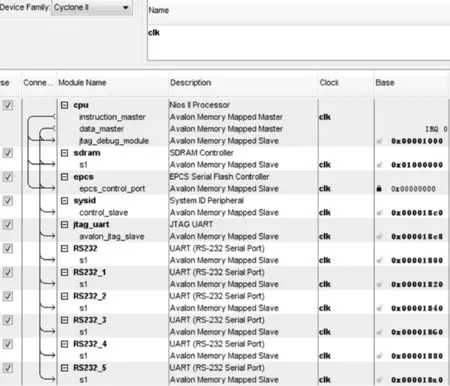
图3 SOPC添加组件
(5) SYSTEM ID:一种标示符,类似于校验和,在下载程序前或重启后都会对其进行检验,以防止Quartus与NIOS程序版本不一致。
(6) JTAG UART:通过Altera FPGA内置的JTAG电路实现PC与SOPC Builder的数据流通信。
(7) UART:提供通用串行接口,支持可变波特率、校验、停止和数据位及流控制信号等。
2) 新建Quartus II Block Symbol File,加入NIOSII软核、PLL及其他模块,连接电路图,分配管脚,编译,完成硬件设计。
PLL为锁相环,对时钟进行倍频并设置为SDRAM的时钟偏移量。硬件电路图搭建见图4。
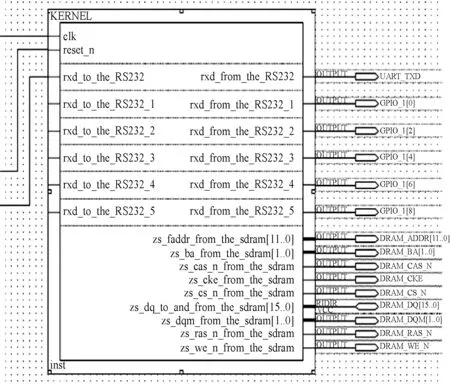
图4 硬件电路图搭建
3) 编写代码,实现对数据的运算、封装和分类,并通过相应串口发送这些数据,完成软件设计。
数据运算采用中分纬度的航迹计算方法(已处理好船舶跨赤道航行的情况)。正常运行时,程序根据设定好的初始船位、航向和航速计算下一时刻船舶的位置(航向和航速可通过响应按键进行改变),然后由当前的船位、航向和航速计算下一时刻船舶的位置。每次计算得到的船位会作为下一次计算的初始值,这样循环计算,即实现船舶航行的简单模拟。该程序的运算周期为1 s,与GPS船位更新的频率一致,且在运算过程中需要将船位、航向和航速信息转化成IEC 61162标准语句,并通过串口实时发送出去。该程序只作简单的验证,后续工作中需要考虑船舶的操纵性能和风流情况设计适当算法。
数据分类主要是判断接收到的每条语句的语句头。由前述可知,语句头由“系统ID”和“语句ID”组成,这里根据系统ID进行数据分类。信号发生器设计流程及系统ID的含义分别见图5和表1。
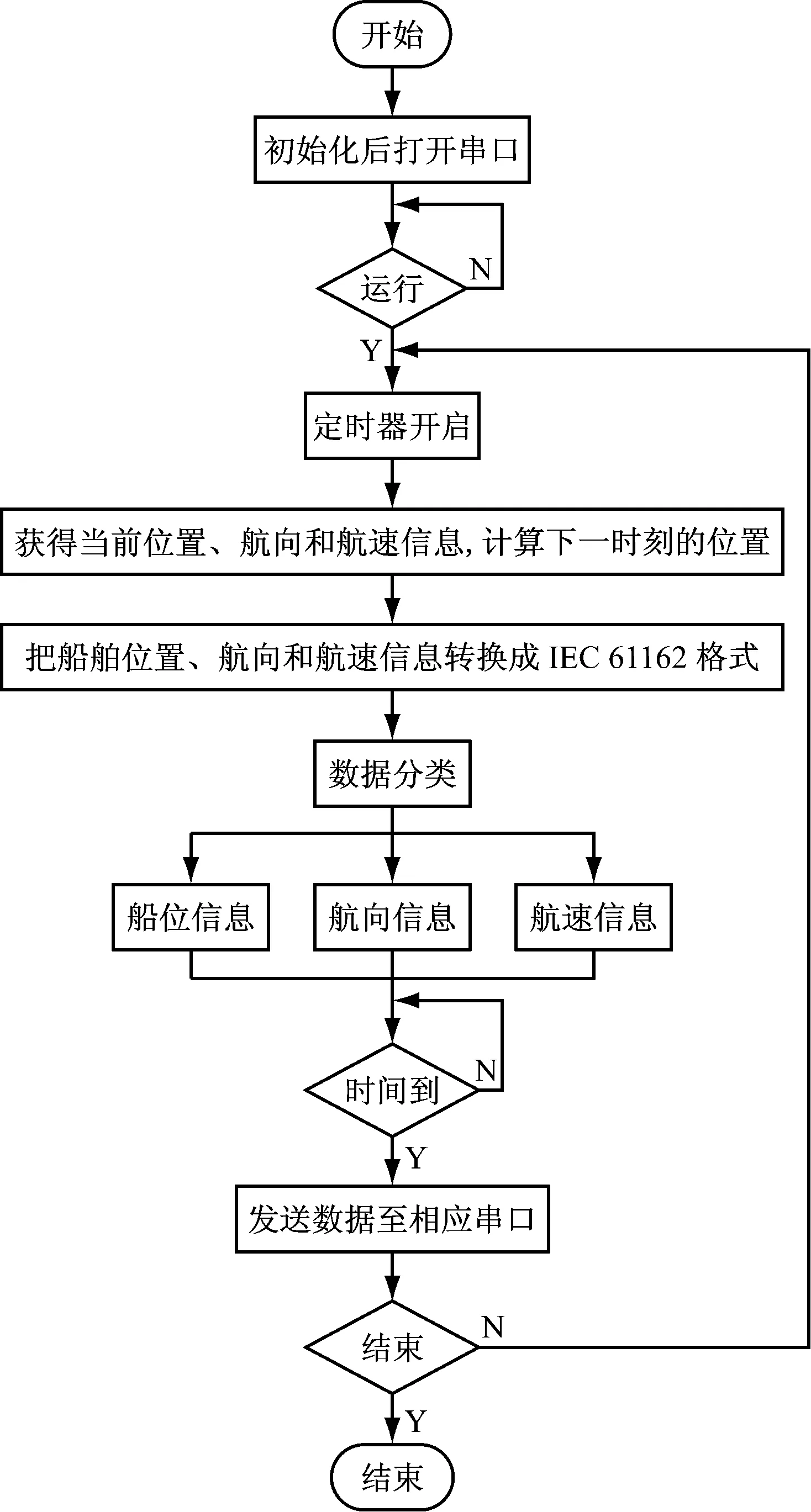
图5 信号发生器设计流程
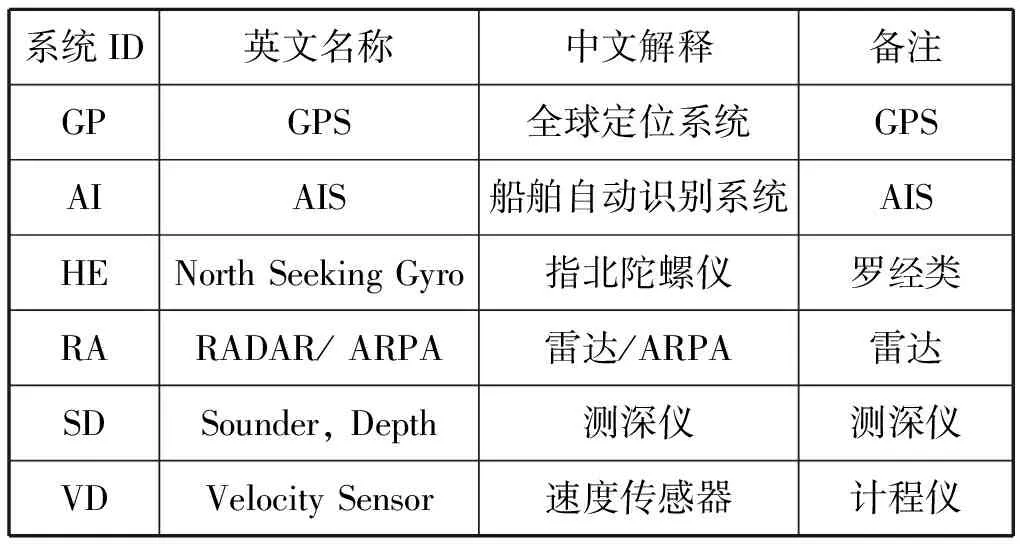
系统ID英文名称中文解释备注GPGPS全球定位系统GPSAIAIS船舶自动识别系统AISHENorthSeekingGyro指北陀螺仪罗经类RARADAR/ARPA雷达/ARPA雷达SDSounder,Depth测深仪测深仪VDVelocitySensor速度传感器计程仪
4) 将程序烧写至FPGA开发板中。
4 试验结果
将产品的各个部分连接起来进行测试。接入模拟传感器信号后的ECDIS界面见图6:主界面右上角显示航向、航速和位置信息;中间显示船舶当前位置的海图、矢量化的航向和航速及船舶运动的历史轨迹。该过程模拟的是船舶驶离大连港,实现了船舶航行的基本功能,显然该方法可行。

图6 试验时的ECDIS界面
5 结束语
针对STCW对ECDIS培训的要求及当前ECDIS培训方法存在的问题,设计一种将ECDIS实船系统与模拟器互联的培训模式。通过逐步验证,最终完成产品的开发,实现一些基本功能。但是,其与真正应用到实际ECDIS的培训相比还有很大差距,需要在后续项目重构和升级中进一步完善。
[1] 孟祥武. STCW公约马尼拉修正案对中国船员教育与培训的影响和对策[J].航海教育研究,2010(3):3-5.
[2] 中国海事局. 关于做好STCW公约马尼拉修正案履约准备工作有关事项的通知[Z].2012.
[3] 张有为. ECDIS培训考核与评估的探讨研究[J].中国水运,2013, 13(6):50-52.
[4] 李赞. 浅谈航海职业院校电子海图实训室建设[J].科技信息,2013(15):282-283.
[5] 喻方平,李立,金华标,等. ICE 61162标准扩充定义及船用数据接收器设计[J].船舶工程,2008,30(1):54-56.
[6] 毛景魁,郑华耀. 动态链接库实现ICE61162数据通信与协议解析[J].上海海事大学学报,2006,27(2):46-50.
[7] 杨海钢,孙嘉斌,王慰. FPGA器件设计技术发展综述[J].电子与信息学报,2010,32(3):714-727.
[8] 贺良华,张杰,游钊. 基于FPGA的NMEA解码和校正的算法设计[J].电力自动化设备,2010,30(2):127-130.
[9] 王俊雄. 基于FPGA及NIOS的嵌入式系统应用研究[D].成都:西南交通大学,2006.
[10] 王红,彭亮,于宗光. FPGA现状与发展趋势[J].电子与封装,2007,7(7):32-37.
[11] 徐璇,姜明新,黄静,等. 基于MFC的工程软件界面设计[J].电子设计工程,2011,19(21):11-13.
SimulationofECDISExteriorSensorsSignal
DUYicun1,2,YANGJiaxuan1,2,ZHAOLiangbin1,2
(1.Navigation College,Dalian Maritime University,Dalian 116026, China;2. Key Laboratory of Navigation Safety Guarantee of Liaoning Province, Dalian 116026, China)
2015-12-20
国家高技术研究发展计划(863计划)课题(2009AA045003);中央高校基本科研业务费专项资金(3132015009)
杜一村(1993—),男,河南驻马店人,硕士生,从事交通运输工程研究。E-mail: nsbsd@126.com 杨家轩(1981—),男,山东济宁人,副教授,博士,从事交通信息工程及航海安全保障研究。E-mail:yangjiaxuan@dlmu.edu.cn
1000-4653(2016)01-0005-05
U675.81;U665.261
A
猜你喜欢
中国德育(2022年18期)2022-10-14
活力(2021年4期)2021-07-28
航海(2020年4期)2020-08-17
船海工程(2019年6期)2019-12-25
早期教育(美术教育)(2019年11期)2019-12-25
少林与太极(2018年9期)2018-09-28
中国航海(2017年3期)2017-11-03
珠江水运(2017年17期)2017-10-10
航海(2017年3期)2017-06-09
航海(2016年5期)2016-10-11
