初始状态不确定的非线性过程系统状态估计的鲁棒粒子滤波方法
2016-10-14 00:05曹婷婷张正江郑崇伟
化工学报 2016年9期
曹婷婷,张正江,郑崇伟
初始状态不确定的非线性过程系统状态估计的鲁棒粒子滤波方法
曹婷婷,张正江,郑崇伟
(温州大学物理与电子信息工程学院,浙江 温州 325035)
在过程系统的控制与故障检测等方面,状态估计发挥着重要作用。针对非线性过程系统状态估计过程中初始状态不确定性问题,提出一种鲁棒粒子滤波方法。该方法首先引入初始状态准确性间接判定准则,根据判定的结果来选择是否进行基于观测偏差反馈机制的初始状态迭代改进。初始值准确性较差时,可以通过初始状态迭代改进策略使最终的初始粒子更接近真实的初始状态,从而增加产生初始粒子的正确性概率,通过粒子滤波迭代得到更准确的状态估计结果。将提出的鲁棒粒子滤波方法与传统粒子滤波方法应用于两个非线性动态系统实例中,结果验证了所提出方法的有效性与鲁棒性。
非线性过程系统;初始状态;状态估计;鲁棒粒子滤波方法
引 言
状态估计在工业过程的控制与故障检测等方面发挥着重要作用。从贝叶斯的观点来看,状态估计的目的是根据过程的测量信息来推断状态的后验概率密度函数。当过程模型可以用状态方程和观测方程表示时,贝叶斯方法提供了一种通过状态转换方程和当前测量更新估计来预测状态的解决方案。众所周知,在线性高斯过程系统中,最常用的状态估计方法是卡尔曼滤波。而在非线性过程系统,尽管可以采用扩展卡尔曼滤波来进行状态估计,但这种方法的稳定性、精确度等一般很难满足实际非线性较强的系统要求。
在非线性系统的状态估计方面,粒子滤波(particle filter,PF)获得了广泛的关注,其基本思想是应用Monte Carlo方法产生大量随机样本(粒子)去近似状态的后验分布从而实现状态估计。这种方法能应用于线性与非线性状态空间模型。众多学者在PF的原理及应用方面做了大量研究。在PF原理综述方面,Arulampalam等[1]对不同的PF算法进行总结与应用分析;杨小军等[2]对PF的原理、收敛性及应用等方面进行了介绍。针对PF存在的不同问题,学者们相继提出了很多改进的解决方法。如李良群等[3]提出一种迭代扩展卡尔曼PF方法;冯驰等[4]在PF的重新采样过程中引入有效样本数并设定重采样阈值;肖延国等[5]提出了一种神经网络改进型无迹PF方法; Maiz等[6]针对时序测量数据包含坏值情况下提出了一种PF改进策略;Yin等[7]提出了一种基于遗传算子策略的智能PF方法。在PF的应用方面,Chen等将PF应用于过程系统的参数估计[8]及动态数据校正问题[9]上;汤仪平等[10]将PF应用于高浓度染料色泽软测量模型辨识上;赵众等[11]将PF应用于气相聚乙烯质量指标在线估计上;López-Negrete等[12]将PF方法应用于滚动时域状态估计上;Zhang等[13]基于数据校正和显著误差检测提出了一种用于鲁棒数据校正的PF方法;Zhao等[14]针对非线性过程状态估计提出了考虑上下界约束情况下的PF方法;Cui等[15]将PF方法应用于动态估计同步发电机的内部状态;Zadakbar等[16]将PF方法应用于非线性非高斯系统的动态风险评估。Alrowaie等[17]将PF方法应用于非线性非高斯系统基于模型的故障诊断。近年来,PF方法被广泛地应用于目标跟踪问题上[18-19]。
PF能够较好地解决非线性系统的状态估计问题。然而,现有的PF方法在进行状态估计时一般假设初始状态是已知且准确的。在实际工业过程中,初始状态一般是未知的。通过估计得到初始状态存在误差。状态的初始值取得不合适会导致不准确的状态估计结果[14]。本文针对非线性过程系统状态估计过程中初始状态不确定性问题,提出一种鲁棒粒子滤波方法,并将鲁棒粒子滤波方法与传统的粒子滤波方法应用于两个非线性动态系统实例中进行比较分析。
1 状态估计中的PF方法
动态系统的状态估计问题一般可通过贝叶斯框架进行描述。本节首先介绍贝叶斯框架下描述的状态估计问题,然后对传统PF进行介绍,最后通过实例分析初始状态对PF影响。
1.1 贝叶斯描述的状态空间估计
考虑一般的非线性系统状态空间模型如下
从贝叶斯估计的观点来看,状态估计的目的是从给定的测量序列推断状态的概率密度函数。假设初始条件,概率分布函数是有效的,通过预测方程式(3)和更新方程式(4)来获取[20]
1.2 传统PF方法
PF是一种从非线性状态空间模型中连续地估计系统状态的统计工具,是一种典型的Monte Carlo方法。给定测量向量可推断出状态的后验概率密度函数。PF的基本思想是应用一组随机样本(粒子)和相应的权重值近似分布
其中,权重值之和为1,为产生粒子的个数,是一个指标函数,如果,其值为1,反之为0。因此,关键步骤是从中产生粒子。由于不是一个传统的概率密度函数,无法实现直接抽样,因此必须采用重要性抽样(importance sampling)获得粒子和相应的权重值。重要性抽样首先要选择重要性密度函数,然后从这个重要性密度函数(一般为标准的高斯分布函数)进行粒子的抽样。定义粒子对应的权重值为
如果采用当前的粒子分布代表当前状态的分布,随着PF迭代的进行,具有大权重值的粒子对状态分布将起决定性作用,这就导致抽样过程出现退化(degeneration)现象,也即粒子多样性的减少。因此PF要通过重抽样(re-sample)阶段来避免PF退化现象。重抽样阶段将根据权重值大小来重新选择粒子,设重抽样后的粒子为,则对应的权重值均设为等权重值,即
基于重抽样后的粒子及其权重值,状态变量的估计值可通过式(10)进行计算。观测变量的校正值则可表示为
1.3 初始状态对PF影响的实例
现有的PF方法研究中,一般假设状态的初始值是已知而且准确的,然而实际工业过程状态的初始值一般是未知的或有误差的。初始状态不准确将会导致状态估计的不准确。下面以一个实例来说明初始状态不准确对状态估计结果的影响。
考虑一组非线性状态方法和观测方程
其中,是过程的状态变量,是过程的观测变量。过程噪声和观测噪声都服从高斯分布,。这组非线性方程的真实初始值及总迭代次数分别为:0,20。
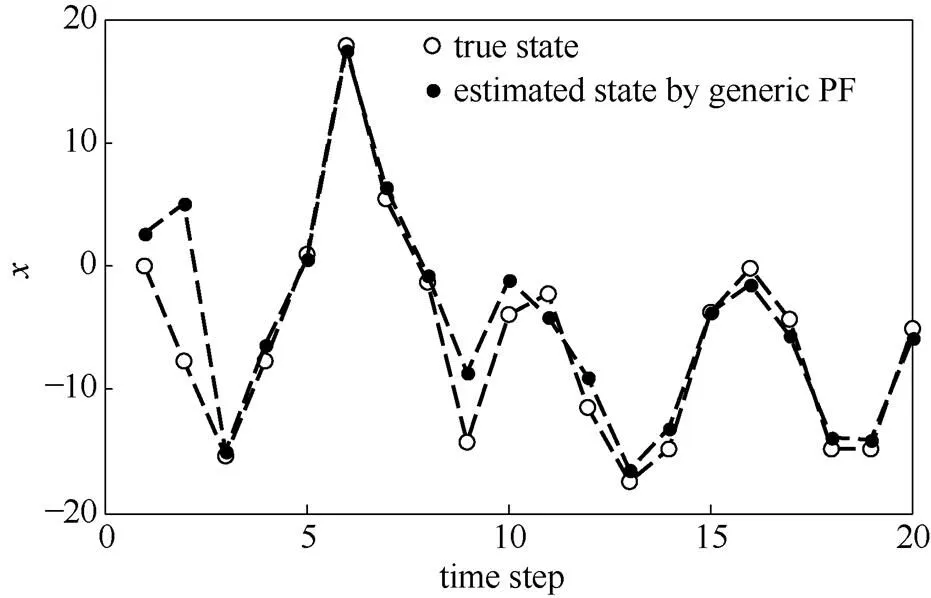
图1 初始状态不准确时传统PF状态估计结果
2 鲁棒PF方法
在实际状态估计问题中初始状态是未知或不准确的。初始状态不确定性会导致状态跟踪不准确或精度降低。本文提出的一种鲁棒PF方法将有效地解决以上问题。
根据初始状态判定的结果来选择PF的初始粒子产生机制。如果接受,则PF的初始状态准确,采用传统PF来产生初始状态,即用式(9)来产生PF粒子。
因此,鲁棒PF方法采用式(18)产生状态的初始粒子以增加产生初始粒子的正确性概率。
产生状态的初始粒子后,继续用PF进行状态估计并判断是否接受。如果不接受,则采用式(17)、式(18)继续迭代更新状态的初始粒子。如此迭代改进,直到接受。
综上所述,鲁棒PF方法的流程框图可表示如图2所示。首先根据给定的初始状态,采用观测变量的测量值与校正值之差来间接进行初始状态准确性判定(measurement test)。如果判定初始状态准确,则采用式(9)来产生PF粒子,并用PF进行状态估计。否则,采用基于观测偏差反馈机制的初始状态迭代改进策略来产生状态的初始粒子并进行状态估计。

图2 鲁棒PF方法的流程框图
在下一节传统PF方法与鲁棒PF方法状态估计结果比较过程中,衡量估计状态与真实状态的接近程度将涉及观测变量的校正值与测量值之间的根均方误差(RMSE)。根均方误差值越小则表明校正值与测量值越接近,从而间接表明估计状态与真实状态越接近。RMSE的计算式为
其中,为总的时间步长,即PF的总迭代次数。
3 实例研究
本节通过两个典型的实例来验证所提出的鲁棒PF方法的有效性。传统PF方法的估计结果用于对比分析。所有的PF方法将选用200个粒子并且迭代20次(20)。
3.1 典型的非线性动态系统
考虑非线性动态系统如1.3节所述,该例子作为非线性动态系统状态估计的测试范例已应用于多篇文献中[9,13]。

图3 非线性动态系统中传统PF方法与鲁棒PF方法的状态估计曲线比较
鲁棒PF方法与传统PF方法的RMSE分别为0.7959和2.3156,结果间接表明鲁棒PF方法估计状态与真实状态更接近。图4为两种PF方法产生的初始粒子分布情况。蓝色分布图为传统PF方法产生的初始粒子分布图,绿色分布图为鲁棒PF方法产生的初始粒子分布图。由图可知,鲁棒PF方法产生的初始粒子正确性概率更高。

图4 非线性动态系统中传统PF方法与鲁棒PF方法产生初始粒子的分布情况
3.2 pH中和反应过程系统
pH中和反应过程系统如图5所示。该实例曾在文献[8]中用于测试状态估计与参数估计问题。在该过程系统中,pH中和反应连续地发生于搅拌釜反应器中,反应器有两个输入流,包括浓度为流速为的乙酸以及浓度为流速为的氢氧化钠。这个反应过程的数学模型为
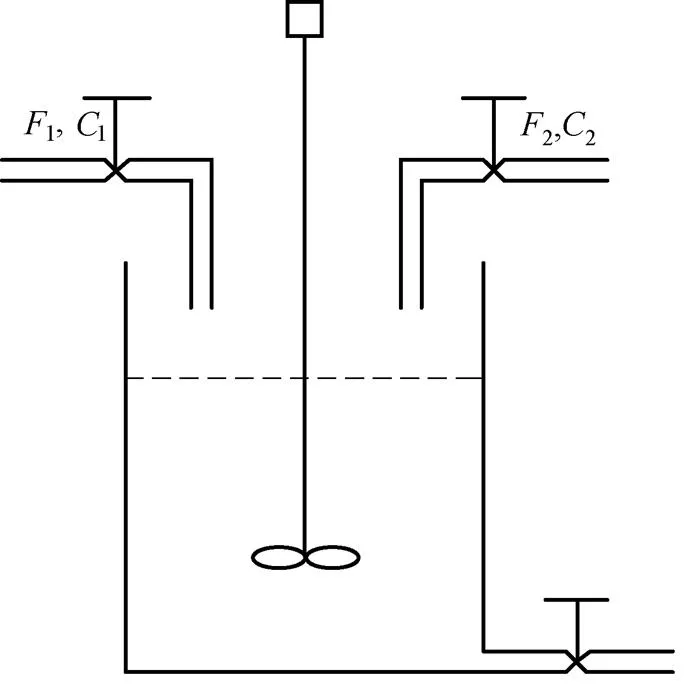
图5 pH中和反应的搅拌釜反应器
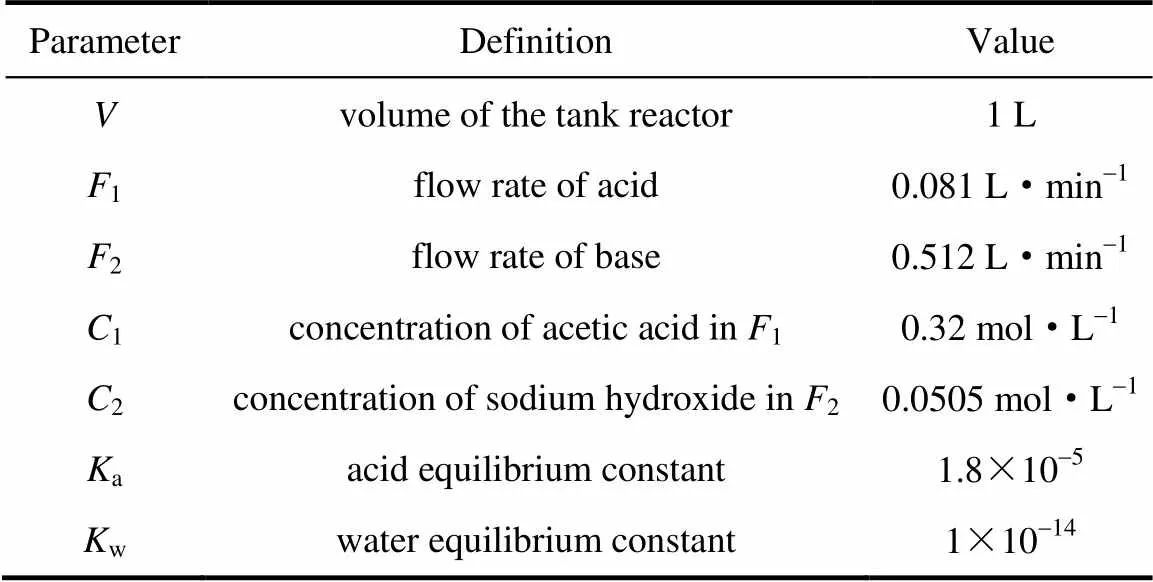
表1 pH中和反应过程模拟中使用的物理参数
在模拟过程中,过程噪声服从零均值对角协方差矩阵为diag(1.0×10-3,1.0×10-3)的高斯分布。观测噪声服从零均值标准差为0.2的高斯分布,真实的初始状态为(,)(0.0432 mol·L-1,0.0432 mol·L-1)。

图6 pH中和反应过程系统传统PF方法与鲁棒PF方法的状态估计曲线比较
鲁棒PF方法与传统PF方法的RMSE分别为0.4176和0.7699。结果间接表明鲁棒PF方法估计状态与真实状态更接近。图7为两种PF方法产生的初始粒子分布情况。蓝色分布图为传统PF方法产生的初始粒子分布图,绿色分布图为鲁棒PF方法产生的初始粒子分布图。由图7可知,鲁棒PF方法产生的初始粒子更接近于真实的初始状态。
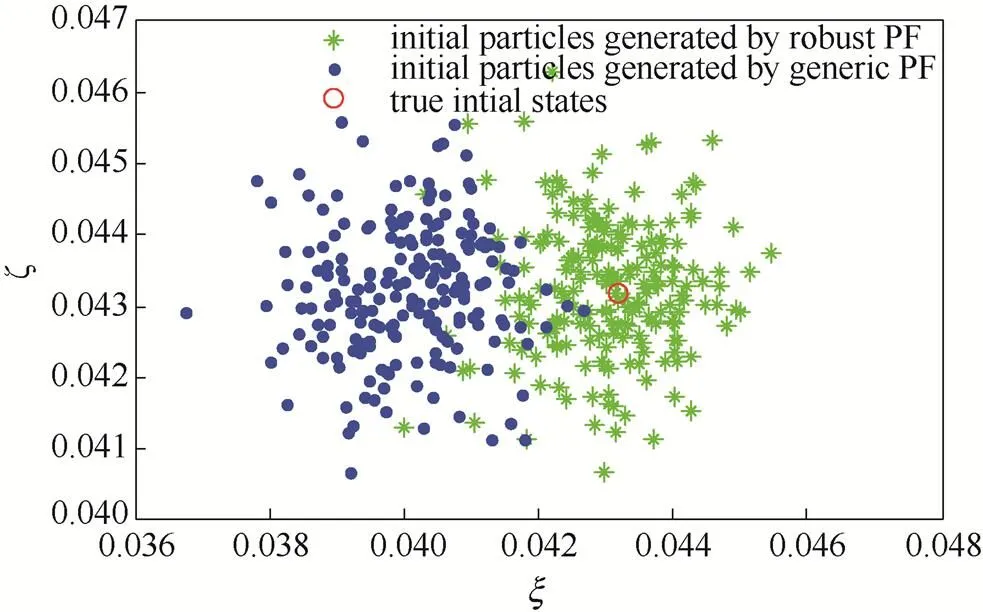
图7 pH中和反应过程系统传统PF方法与鲁棒PF方法产生初始粒子的分布情况
在以上两个实例中,通过状态估计曲线、RMSE及产生初始粒子分布情况等方面的综合比较,结果表明鲁棒PF方法在初始状态鲁棒性方面明显优于传统PF方法。
4 结 论
论文提出了鲁棒PF方法,针对初始状态不确定性问题,引入初始状态准确性间接判定准则,根据判定的结果来选择是否进行初始状态改进。初始值准确性较差时,鲁棒PF方法可以通过初始状态迭代改进策略使最终的初始粒子更接近真实值,从而增加产生PF初始粒子的正确性概率。在给定的初始状态不准确情况下,将传统PF方法与鲁棒PF方法应用于两个典型非线性动态系统实例中,通过状态估计曲线、RMSE及产生初始粒子分布情况的综合比较验证了鲁棒PF方法的有效性与鲁棒性。
References
[1] ARULAMPALAM M S, MASKELL S, GORDON N,. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking [J]. IEEE Transactions on Signal Processing, 2002, 50 (2): 174-188.
[2] 杨小军, 潘泉, 王睿, 等. 粒子滤波进展与展望 [J]. 控制理论与应用, 2006, 23 (2): 261-267.
YANG X J, PAN Q, WANG R.. Development and prospect of particle filtering [J]. Control Theory & Application , 2006, 23 (2): 261-267.
[3] 李良群, 姬红兵, 罗军辉. 迭代扩展卡尔曼粒子滤波器 [J]. 西安电子科技大学学报, 2007, 34 (2): 233-238.
LI L Q , JI H B , LUO J H . Iterated extended Kalman particle filtering [J]. Journal of Xidian University , 2007, 34 (2): 233-238.
[4] 冯驰, 王萌, 汲清波. 粒子滤波器重采样算法的分析与比较 [J]. 系统仿真学报, 2009, 21 (4): 1101-1105.
FENG C, WANG M, JI Q B. Analysis and comparison of resampling algorithms [J]. Journal of System Simulation, 2009, 21 (4): 1101-1105.
[5] 肖延国, 余志军, 魏建明, 等. 一种改进的无迹粒子滤波器在目标跟踪中的应用 [J]. 中国科学技术大学学报, 2008, 38 (2): 183-188.
XIAO Y G , YU Z J , WEI J M,. An improved unscented particle filter for target tracking in sensor networks [J].Journal of University of Science and Technology of China, 2008, 38 (2): 183-188.
[6] MAIZ C S, MOLANES-LOPEZ E M, MIGUEZ J,. A particle filtering scheme for processing time series corrupted by outliers [J]. IEEE Transactions on Signal Processing, 2012, 60 (9): 4611-4627.
[7] YIN S, ZHU X. Intelligent particle filter and its application to fault detection of nonlinear system [J]. IEEE Transactions on Industrial Electronics, 2015, 62 (6): 3852-3861.
[8] CHEN T, MORRIS J, MARTIN E. Particle filters for state and parameter estimation in batch processes [J]. Journal of Process Control, 2005, 15 (6): 665-673.
[9] CHEN T, MORRIS J, MARTIN E. Dynamic data rectification using particle filters [J]. Computers & Chemical Engineering, 2008, 32 (3): 451-462.
[10] 汤仪平, 金福江. 基于粒子滤波的高浓度染料色泽软测量模型辨识方法 [J]. 化工学报, 2012, 63 (9): 2721-2725.
TANG Y P, JIN F J. Identification for soft-sensing color model based on particle filter [J].CIESC Journal, 2012, 63 (9): 2721-2725.
[11] 赵众, 郜娜, 潘高峰. 基于粒子滤波联合估计的气相聚乙烯质量指标在线估计 [J]. 化工学报, 2012, 63 (9): 2904-2012.
ZHAO Z, GAO N, PANG G F . Polymer properties on-line estimation for gas-phase polyethylene based on particle filtering joint estimation [J]. CIESC Journal, 2012, 63 (9): 2904-2012.
[12] LÓPEZ-NEGRETE R, PATWARDHAN S C, BIEGLER L T. Constrained particle filter approach to approximate the arrival cost in moving horizon estimation [J]. Journal of Process Control, 2011, 21 (6): 909-919.
[13] ZHANG Z, CHEN J. Simultaneous data reconciliation and gross error detection for dynamic systems using particle filter and measurement test [J]. Computers & Chemical Engineering, 2014, 69: 66-74.
[14] ZHAO Z, HUANG B, LIU F. Constrained particle filtering methods for state estimation of nonlinear process [J]. AIChE Journal, 2014, 60 (6): 2072-2082.
[15] CUI Y, KAVASSERI R. A particle filter for dynamic state estimation in multi-machine systems with detailed models [J]. IEEE Transactions on Power Systems, 2015, 30 (6): 1-9.
[16] ZADAKBAR O, KHAN F, IMTIAZ S. Dynamic risk assessment of a nonlinear non-Gaussian system using a particle filter and detailed consequence analysis [J]. Canadian Journal of Chemical Engineering, 2015, 93 (7): 1201-1211.
[17] ALROWAIE F, GOPALUNI R B, KWOK K E. Fault detection and isolation in stochastic non-linear state-space models using particle filters [J]. Control Engineering Practice, 2012, 20 (10): 1016-1032.
[18] RUI T, ZHANG Q, ZHOU Y,. Object tracking using particle filter in the wavelet subspace [J]. Neurocomputing, 2013, 119 (16): 125-130.
[19] DOU J, LI J. Robust visual tracking based on interactive multiple model particle filter by integrating multiple cues [J]. Neurocomputing, 2014, 135 (8): 118-129.
[20] PITT M K, SHEPHARD N. Filteringsimulation: auxiliary particle filters [J]. Journal of the American statistical association, 1999, 94 (446): 590-599.
A robust particle filter for estimating states in nonlinear process systems with uncertain initial states
CAO Tingting, ZHANG Zhengjiang, ZHENG Chongwei
(College of Physics and Electronic Information Engineering, Wenzhou University, Wenzhou 325035, Zhejiang, China)
State estimation is critical for both process control and fault detection. A robust particle filter was proposed to estimate states in nonlinear process systems with uncertainty of initial states, which an indirect acceptance criterion was introduced to determine accuracy of the initial states and then to decide the needs for iterative improvement on the initial states by the feedback mechanism of observation bias. In case that the initial states were inaccurate, the iterative improvement strategy would be triggered to adjust particles closer to the true initial states. Therefore, the probability of setting the correct initial states to particles was increased and the accuracy of state estimation was improved through particle filter iteration. When applied to two nonlinear dynamic systems, the proposed particle filter demonstrated much more effectiveness and robustness than the traditional particle filter.
nonlinear process system; initial states; state estimation; robust particle filter
supported by the National Natural Science Foundation of China (61374167), the Natural Science Foundation of Zhejiang Province (LQ14F030006) and the Science and Technology Planning Project of Zhejiang Province (2015C31157, 2014C31074, 2014C31093).
date: 2015-09-11.
ZHANG Zhengjiang, zjzhang@wzu.edu.cn
TQ 021.8
A
0438—1157(2016)09—3826—07
10.11949/j.issn.0438-1157.20151440
国家自然科学基金项目(61374167);浙江省自然科学基金项目(LQ14F030006);浙江省科技计划项目(2015C31157,2014C31074,2014C31093)。
2015-09-11收到初稿,2016-05-04收到修改稿。
联系人:张正江。第一作者:曹婷婷(1990—),女,硕士研究生。
猜你喜欢
北京航空航天大学学报(2019年9期)2019-10-26
自动化学报(2019年6期)2019-07-23
自动化学报(2017年4期)2017-06-15
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
浙江大学学报(工学版)(2015年1期)2015-03-01
高中生学习·高三版(2014年3期)2014-04-29
高中生学习·高三版(2014年3期)2014-04-29
燕山大学学报(2014年2期)2014-03-11