基于遗传算法的滑模控制系统在锅炉温度控制中的应用研究
2016-10-17 01:13程龙韩森李彤彤田艳兵
现代计算机 2016年24期
程龙,韩森,李彤彤,田艳兵
(青岛理工大学自动化工程学院,青岛 266520)
基于遗传算法的滑模控制系统在锅炉温度控制中的应用研究
程龙,韩森,李彤彤,田艳兵
(青岛理工大学自动化工程学院,青岛266520)
0 引言
滑模控制(Sliding Mode Control,SMC)也叫变结构控制 (Variable Structure Control,VSC),由前苏联学者Utkin和Emelyanov与20世纪50年代末提出。滑膜控制可以根据系统的动态过程,调节系统使其达到设定的切换面,并不需要被控系统结构固定,是一种特殊的非线性控制。为了实现系统的稳态控制,可以通过预定的滑动模态轨迹运动,使系统渐进的达到稳定状态[1-2]。滑膜控制不涉及被控对象的参数,因此物理实现较为简单,响应速度也十分快速。这种控制系统因此具有十分广泛的用途[3]。不过目前该算法仍然存在缺点,例如,缺乏有效的、易操作的设计方法。在面临非线性系统设计过程中,最大的难点在于将以微积分为基础的分析方法应用于其算法约束条件下,由于其数据不可微,导致参数难以优化。本文把遗传算法和滑模控制结合起来的,避免了上述困难,其中该控制器中切换项参数融入遗传算法的参数寻优,遗传算法的引入,使现有的滑膜控制比传统的控制器控制效果更加有效[4]。
锅炉气温温度控制是工业控制的一个重要研究对象,其温度是发电等各个过程的一个重要参数。温度控制对锅炉安全和稳定运行有重大意义,温度过高会使锅炉承受过高的气压和热应力而损坏发生危险,过低对经济效益产生影响,为此我们必须严格控制锅炉温度在给定值范围内。现在大部分锅炉控制过程中仍然是通过人工调节,主要是因为控制参数无法合理选取及被控对象过于复杂、炉温存在非线性以及滞后[5],因此在滑膜控制中引入遗传算法来优化控制器参数十分有必要。
1 遗传算法在滑模控制中的研究
1.1概述
遗传算法的提出主要是被用来解决组合优化的问题,近年来快速扩展到机器人学、设计规划、图像处理、神经网络优化、人工生命等领域,说明遗传算法的应用潜力十分巨大[6]。
任意一个对控制对象的性能优化,也就是在给定输入的情况下,通过合适的控制算法,使被控对象在提前设定好的轨迹下运动。所以可以通过控制部分对遗传算法进行研究分析,如图1所示。
1.2遗传算法在滑模控制中的设计
滑模控制主要是由被控对象的输入输出,通过状态空间中的切换函数,控制使其趋于设定运动轨迹。这

图1 遗传算法的控制图释
被控非线性系统为:

式中x∈Rn是状态向量,u∈Rm是输入向量,n为系统阶次。
滑动平面定义为:

已知上式中系统存在误差为:
e=x-xd=[ee…en-1]T,H∈Rn代表滑动表面的系数或斜率。利用变结构控制,误差问题转变为S(e)上对所有t>ts保持误差最小的一阶正定问题。ts是滑模开始时间,且在滑模切换时系统的动态给定为S.(e,t)=0,在滑模定义上常常用e当做状态向量x。
采用PID控制器,可以简化控制,其控制器结构可以描述为:

上面四个表达式分别表示了不对称系统的切换项,以及误差状态下的比例、积分和微分项。利用PID控制给出大家一个比较容易处理的控制方法。在该简化的滑模控制系统设计中,要给上式(4)-(7)选出8个切换项参数,以及与式(2)滑动面方程相关,由HT=[h 1]决定的切换逻辑,因此设计任务就是在求解空间状态方程:

又上式(8)中可知,求解参数向量

满足最优判据的参数向量可以构成变结构控制器。
设计上面描述的控制器可以通过模型线性化来实现。为了分析求解最优化的滑模控制器参数,要对2次型的特性指标求导,由于系统需要线性化模型,导致会损失许多原有物理系统的有用信息,而且在实际控制中许多被控对象的非线性很严重或动态性能太复杂,滑模控制系统的参数设计用分析的方式很难解决。
下面在滑模控制系统中引入遗传算法来对参数进行设计。首先要考虑滑模控制系统的特定问题,例如遗传算法所需的编码、种群和适应度函数等问题。
(1)编码
对与式(4)-(7)的所列参数,通过整数串编码组成染色体,每个10进制的参数映射成:

式中C=[Cmin,Cmax]是被编码的实值,b=10是10进制编码的基值,αi∈{0,…,b-1}是无符号的整数码,p是数位(指数),它的选择在速度和精度之间取得折衷。不同的参数有不同的范围,也可在很多代以后自适应的调节参数范围,让它等于已找到的第一个参数的±30%,因为这个阶段,基本上所有参数都已经收敛到一个狭窄的范围内。
(2)初始种群
滑模控制典型的种群规模选为30,在初始种群编码中,可以应用已有的知识,可以先将编码组成某些染色体,其余个体可以用随机产生的染色体来填补。这样保证有一个直接的起始点,它不同于人工神经网络学习技术,人工神经网络学习起始点不涉及滑模控制器参数的直接映射。从现有的知识开始通常会具有较快的收敛,也可从随机的染色体开始。种算法不需要具体被控对象。
滑模控制系统中引入遗传算法,可以解决控制器设计参数时求解的困难。首先把设计问题转化成一个分析问题,采用遗传算法,智能地寻求受分析的控制器部分,最后得出全局最优的控制系统。
(3)适应度函数
适应度函数相当于优化中性能指标的倒数,具有反应稳态误差小、超调量小、震荡平缓,上升时间短以及稳定性好等优点,其定义为:
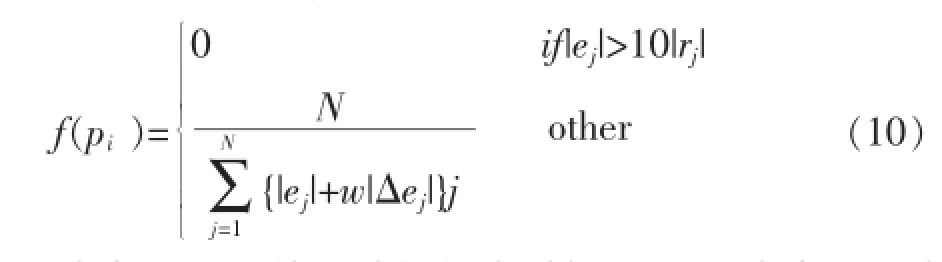
式中N是评估设计的仿真时间;ej是仿真步骤j时的误差,而Δej是误差的变化,w是ej和Δej之间的权值,这里取1。rj是参考输入,j是仿真中时间下标。在计算自适应函数的分母项时可以利用误差时间加权的L1范数,Δe项可被加权以进一步减缓震荡。
在计算实际的控制器的特性时,要对参数有一定隐含的约束,即控制信号的限制,这样对控制器执行中的损耗有所减少,式(10)表示了误差信号太大时对适应度函数的限制。与常规优化技术相比而言,遗传算法在约束条件下使特性函数最小容易很多。如有必要,可以把系统的稳定性数据也包括在适应度函数中。
2 锅炉温度控制简介
炉温控制系统对炉温的控制有较大的延迟,同时具有非线性。研究非线性系统的辨识和控制,可以提高锅炉运行的经济效益减少能源浪费显得尤为重要,锅炉设备作为发电等一系列工业工程中不可缺少的一部分,其工作在高压和高温的工作状态下,因此对其温度的准确控制也是安全保障。
同时,锅炉温度系统控制方法的研究在工业生产及其他控制系统和不稳定对象的研究中有重要的意义和价值,而且,在研究和控制更为复杂的非线性不稳定对象系统中,锅炉温度控制方法的研究为此提供了很好的基础。因此在工业中对锅炉温度的稳定性控制有严格的要求[7]。
3 仿真研究
已知某工业生产过程中锅炉的数学模型为:

对被控对象仿真研究,遗传算法的参数寻优过程中,群体规模为40,且都是随机产生的,变异概率为0.05,交叉概率为0.6,经过150代遗传算法以后,基本收敛了,每一代的平均适应度如图2所示。由图2可得出,平均适应度快速收敛并停在稳定值,且在80代以后基本达到稳定值。

图2 遗传算法群体适应度平均值曲线
遗传算法求出的优化参数如下所示:

这里用阶跃响应来测试该控制系统的性能,由以下仿真结果可以明显看出遗传算法设计的滑模控制器过渡过程理想,具有很好的瞬态响应、稳态误差和鲁棒性能。
滑膜控制系统很好地跟随了输入信号,动态性能方面模糊滑模控制得到了很大改善,同时,调节时间也减小很多,控制性能整体得到改善。
4 结语
由于常规的控制器在锅炉控制系统很难达到理想的控制效果,因此本文在滑膜控制的基础上引入遗传算法,与传统的控制器相比能有效地提高系统的稳定性和响应速度;在滑膜控制器中加入遗传算法可以提高系统的抗干扰能力,使系统对外部扰动有较好的适应性以及鲁棒性控制,同时也能够解决用分析方法很难完成的SMC参数设定的问题,系统跟踪性能的精度也有十分显著的提高,因此该控制算法在炉温控制系统中有十分重要的应用前景。
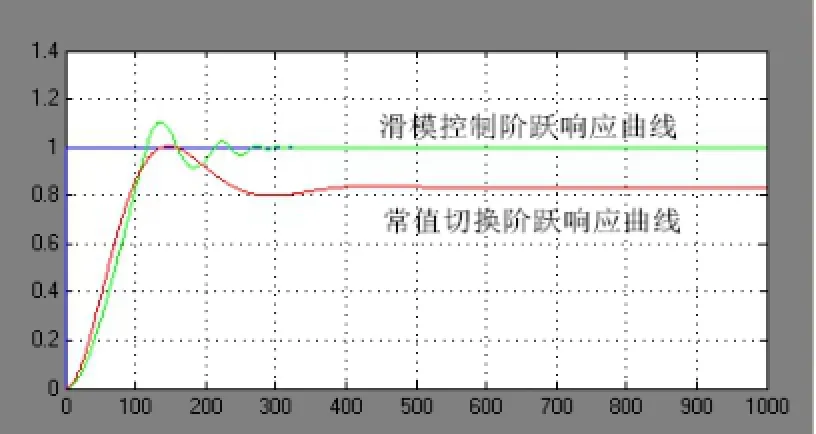
图3 滑模控制与常值切换阶跃响应曲线
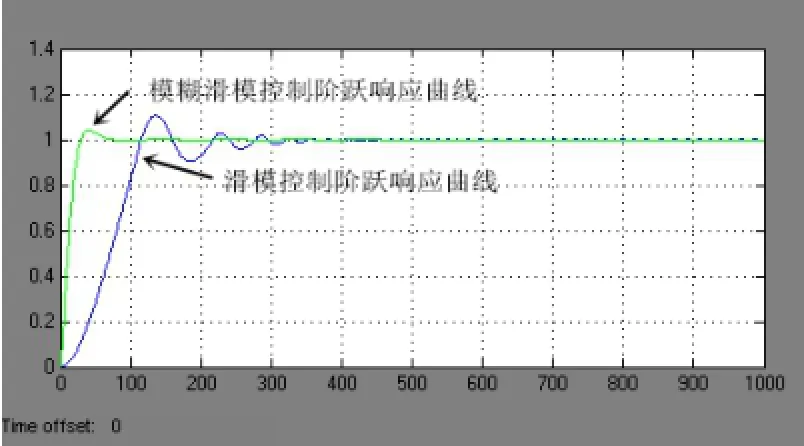
图4 遗传算法优化参数的滑模控制系统效果
[1]宋莹,樊立萍,张君.基于趋近律滑模的台车式倒立摆系统控制研究[J].自动化与信息工程,2011(4):33-35.
[2]赵旖旎.基于能量的ACROBOT仿生悬摆动态伺服控制[C].2008全国博士生学术论坛-电气工程:2028-2035.
[3]王凯,张根宝.模糊滑模控制在双容水箱中的应用研究[J].自动化仪表,2015(1):76-78.
[4]郑权,忻尚芝,钱建秋.基于改进遗传算法的PID参数研究[J].电子科技,2015(11):5-7.
[5]栾秀春,李士勇.火力发电机组锅炉控制技术的新进展[J].热能动力工程,2003(4):329-333.
[6]郝涵.基于遗传算法的图像跟踪研究[D].南京理工大学,2008.
[7]孙桓宇.预测控制在锅炉温度控制系统中应用研究[D].长春理工大学,2013.
Fuzzy Sliding Mode Controller;Coupled-Tank;Simulink;Robustness
Research on the Application of Fuzzy Sliding Mode Control in Coupled-Tank CHENG Long,HAN Sen,LI Tong-tong,TIAN Yan-bing
(College of Automatization Engineering,Qingdao University of Technology,Qingdao 266520)
1007-1423(2016)24-0007-04DOI:10.3969/j.issn.1007-1423.2016.24.002
程龙(1990-),男,湖北天门人,在读硕士研究生,研究方向为微驱技术、智能控制
田艳兵(1978-),男,山东青岛人,博士,副教授,硕士生导师,研究方向为气动伺服系统控制、微机电系统建模与控制、智能控制等
韩森(1990-),男,河南驻马店人,在读硕士研究生,研究方向为气动伺服系统控制、精密定位技术、非线性系统智能控制
李彤彤(1992-),女,山西临汾人,在读硕士研究生,研究方向为精密定位技术、微机电系统建模与控制
2016-05-31
2016-08-15
针对锅炉温控系统中存在比较典型的延时、非线性控制的的问题,设计一种遗传算法与滑模变结构控制相结合的控制器,并利用MATLAB/Simulink进行仿真分析,以验证该控制方法的性能。仿真结果说明基于该控制器,能够保证锅炉温控系统的动态性能和稳态性能,同时使系统的调节时间减少,具有更好的稳态响应,系统的控制性能整体得到较大的提升,表明在滑膜控制中引入遗传算法比常规控制算法使控制系统具有更好的稳态误差、自适应性和鲁棒性,完全适用于锅炉温度控制系统。
遗传算法;滑模控制;Simulink;鲁棒性
Based on typical in the boiler temperature control system of time delay and nonlinear control problem,designs a genetic algorithm combined with a sliding mode variable structure control of controller.In order to validate the performance of the control method,designs a fuzzy sliding mode controller in MATLAB/Simulink.The simulation results show that using the control method,the dynamic and stationary performances of the system is ensured,the quiver is weakened,and the system is stabilized more quickly.The dynamic performance and practicability of the system is improved by the control method.Compared with conventional controller,the fuzzy sliding mode controller has better adaptability and robustness,so it can be applied to the complex liquid level control systems.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
建材发展导向(2021年14期)2021-08-23
防爆电机(2020年4期)2020-12-14
环球时报(2020-08-11)2020-08-11
北京航空航天大学学报(2017年4期)2017-11-23
中国民族民间医药·下半月(2014年2期)2014-09-26
中国医药导报(2011年27期)2011-12-31