
基于车联网的时空模型研究
2016-10-21 15:48梁雪辉
电子技术与软件工程 2016年9期
梁雪辉
【关键词】车联网 时钟理论 RCC8 时空顺序图
随着经济的快速发展,城市交通车辆的数量也在日益增长,发生拥堵和阻塞的现象也愈发严重,发生交通事故的频率也随之增加,而对交通安全的要求也越来越高。构建车联网系统成为了解决交通问题的重要举措。车联网是将多种先进技术有机地运用于整个交通运输管理体系而建立的一种实时的、准确的、高效的交通运输综合管理和控制系统。
各国正逐渐加大对于车联网系统的研究力度,国外对于车联网的研究技术已经比较成熟,比如美国的智能车辆公路系统(IVHS)描述了一个车联网系统的主要特点;日本的道路情报通信系统(VICS)、英国的(SCOOT)和悉尼交通自适应协调系统(SCATS)等系统通过车辆与道路之间建立有效的信息通信,描述车与周边环境的相互协作关系,实现智能交通的管理和服务。在国内,有很多的大企业、高校也都投入到智能交通、车联网的研究领域中来,如国家科技攻关专题“智能公路技术跟踪”,并且国内首个“智能驾驶与车联网实验室”在重庆科技研究院揭牌。但是,由于国内在车联网方面的研究刚刚起步,实际应用领域还比较窄,主要是体现在电子收费系统等方面,而且在各个环节尚需加强和完善。
本文提出从时空的角度对车联网构建时空模型,能够更好地处理车与车、车与周围环境之间相互时空关系,实现智能交通的管理和服务。时空模型强调的是利用时空分析的工具和技术来模拟动态过程,探究和挖掘隐含于时空数据中的信息和规律,对进一步的时空信息模拟、预测和决策分析具有重要意义及应用价值。
1 时空逻辑
1.1 时间逻辑
时间逻辑往往用来描述一个系统的规则和作为在时间上表示及推理命题的象征。时钟理论是一种解决时间约束问题的形式化方法,其提出了将概念物理世界和计算世界连接在一起的时钟规范,并且时钟理论有一个完整的从连续事件到离散事件的映射系统可用于分析与推理事件序列。基于时钟理论的物理系统规范使得每一个事件时间描述更清晰和各个事件之间的影响更精确。设e是一个事件,我们将用符号Clock(e)来表示时钟记录事件发生的时刻,设C为一个时钟,用符号event(C)表示事件的发生由Clock(C)记录event(e)发生的时刻,此时为了方便,我们忽略了相应的名称的不同,那么则有clock(event(c)) = c
1.2 空间逻辑
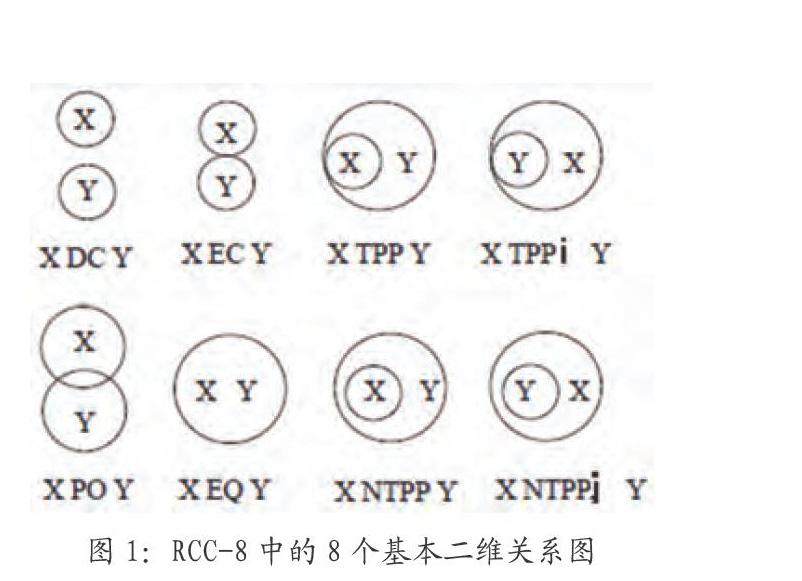
空间逻辑是一个数字逻辑适用于定性空间表示和推理,空间逻辑原语分为基于点和基于区域两种,在距离模型的研究中,主要是以点为原语,而在空间拓扑推理领域中更多研究中倾向于用区域作为空间原语,如在拓扑关系表示模型方面被广泛使用的RCC- 8模型。RCC-8是一个众所周知的关系代数推理二进制的空间区域之间的关系, RCC- 8模型包含了8种互不相交且联合完备的RCC关系:{DC,EC,PO,TPP, TPPi,EQ,NTPP,NTPPi},其基本关系如图1。
1.3 时空逻辑
本文的时空逻辑是基于将时钟理论与表示对象之间的空间拓扑结构的RCC-8相结合,按照时间顺序来描述两个合适的度量空间的对象之间彼此的空间位置关系随着时间的推移也跟着发生变化,通过展示如何由一个时钟来表示一个事件的发生导致车联网中的对象之间的空间关系的变化。其表示方法如图2 所示。
2 对车联网建立时空模型
车联网的大范围移动和高速移动特点决定了车联网交通信息传输的方式主要是无线通信和数字通信,而车与车之间的信息交互是基于无线网络系统并且有各种不同节点参与的信息传输、共享和交换的过程,通过车辆之间的信息交互,车联网中的各个节点都能自主的获取其他节点的信息。
在车联网中的时空信息的表达形式中,我们以车作为研究的一个对象,我们认为车辆对象是由属性特征、几何特征、时态特征和行为特征所构成,属性特征是反应车辆的属性信息,并且我们假设车辆的属性特征由:车辆的位置(x)、速度(v)和加速度(a)组成;几何特征是车辆的位置表现;时态特征主要是车辆的时态标签;行为特征是车辆的操作特征,也是我们建立基于车辆的面向对象时空模型重要接口。因此在车联网环境下的任意车辆的一个时空模型可以表示成:
其中,Car_ID是车辆的标识码,可以唯一标示车联网环境下的每一个车辆,Attribute(t)标示随着时间变化的非空间属性特征,比如在某一时刻车辆的速度、加速度等物理量,Spatial(t)表示随着时间变化车辆的位置特征,Actions表示车辆的行为特征,包括车辆在道路上要进行的一系列操作,本文定义车辆的基本操作包括车辆在车道上加速(Acc)、减速(Dec)、匀速(Uniform)和变换车道(Trans)这四个操作。实现车辆与车辆之间的相互联系,从而使得车辆收集到的数据和操作紧密地联系起来。Temporal(Ts,Te)表示车辆的时态特征,也就是车辆行为特征采取的操作的开始时间Ts和结束时间Te。这样,我们就可以将车联网环境下的车辆的空间对象的所有变化情况归纳为:不同的车辆处于不同的位置与周围不同的环境中的对象之间所形成的不同的空间拓扑关系。
3 模型验证
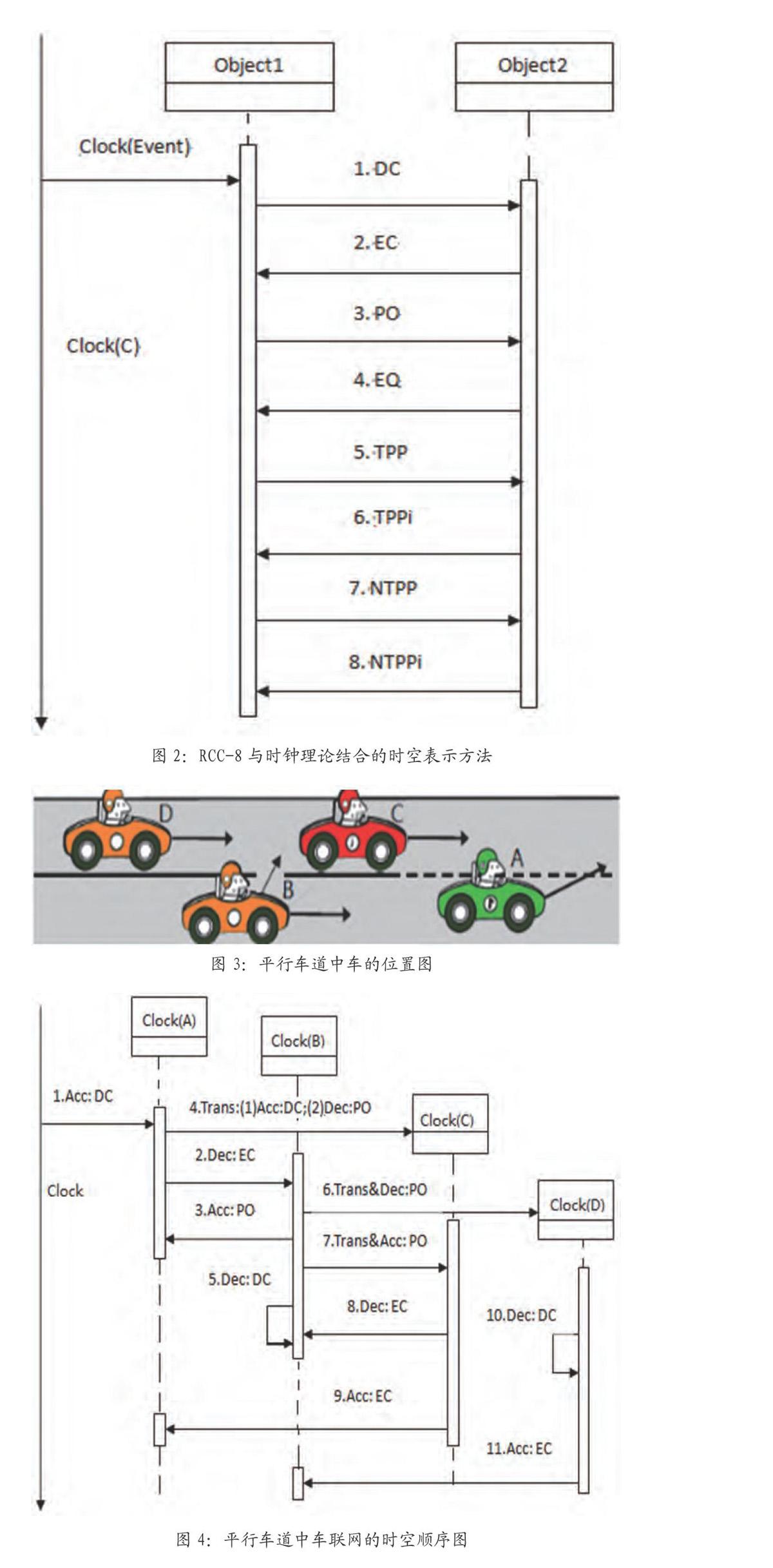
在车联网中,两条平行车道中,车与车之间的位置关系除了包含有单一车道时的位置关系外,还须考虑车的变换车道的情况。(如图3,A与B、C与D同一方向,假设A、B都往C、D所在的车道变换车道,在这种交通环境下,Car_A、Car_B、Car_C和Car_D相互影响制约,车辆的操作有加速(Acc)、减速(Dec)、匀速(Uniform)和換道(Trans),比如Car_A换道的时候Car_C要做出减速的调整,Car_B换道的时候要考虑自身的速度对Car_C和Car_D的影响等。
此时用我们的时空顺序图的模型对这种可以将其可能发生的位置关系进行验证,所得的分析表示如图4所示。
4 结束语
本文从时钟理论和表示区域空间关系的RCC-8相结合的角度,对车联网构造时空顺序图的时空逻辑模型,并在车联网的平行车道情景中模拟和验证了时空顺序图对于分析基于事件处理的应用,既有助于人們对车联网的认识和理解,也拓宽了研究的思路。当然,由于文章篇幅的原因,对于车联网中的其他路况比如十字路口等相关情景还没有进行分析。同样,时间和空间相结合的研究工作还存在很多问题。在将来,对满足相关车联网时空推理性问题的算法会作为我们的研究方向。此外,我们将对我们的时空逻辑进行验证和提供支持工具。
参考文献
[1]Varaiya,P.: Smart cars on smart roads:problems of control.IEEE Trans.Automat.Control 38(2)(1993) 195-207.
[2]Hall,R.,Chin,C.,Gadgil,N.:The automated highway system/street interface:Final report.PATH Research Report UCB-ITS-PRR-2003-06,UC Berkeley (2003).
[3]He,J.:A Clock-Based Framework for Construction of Hybrid Systems. Theoretical Aspects of Computing-ICTAC Volume 8049 of the series Lecture Notes in Computer Science, pp.22-41(2013).
[4]Duntsch I,Wang H,McCloskey S.A relation algebraic approach to the region connection calculus.Artificial Intelligence,2000,122:111-136.
[5]D.A.Randell,Z.Cui,and A.G.Cohn.A spatial logic based on regions and connection.Proc.KR-92,165-176,1992.Morgan Kaufmann.
[6]马杨.车路协同,还有多远?[J].中国交通信息化,2011,(9):30-31.
[7]金纯,徐洪刚,魏星.基于IEEE802.11P/1609标准的路车互联网的初步实现[J].计算机应用研究,2011,28(11):4219-4223.
