超短基线定位的海上应用及精度评估
2016-10-31 01:34周红伟张国堙
海洋学研究 2016年3期
周红伟,张国堙,蔡 巍,张 恺
(1.国家海洋局 第二海洋研究所,浙江 杭州 310012; 2. 国家海洋局 海底科学重点实验室,浙江 杭州 310012)
超短基线定位的海上应用及精度评估
周红伟1,2,张国堙1,2,蔡巍1,2,张恺1,2
(1.国家海洋局 第二海洋研究所,浙江 杭州 310012; 2. 国家海洋局 海底科学重点实验室,浙江 杭州 310012)
超短基线定位系统可以为水下调查设备提供精确的定位信息,是当今海洋探测工作必不可少的装备。超短基线定位系统的定位结果包含了多种来源的误差影响,对超短基线定位数据进行有效的处理是保证水下精确定位的前提。本文通过对超短基线基阵进行校准,并对其定位精度进行精度评估,对海上应用采集到的数据进行处理分析,对原始数据中出现的跳点进行剔除、滤波处理,得到较可靠的水下定位结果。
超短基线;水下定位;精度评估;跳点
0 引言
随着海洋科学考察以及资源勘探的发展,水下调查设备的应用越来越广泛且重要。在水下调查作业中,需要为水下设备进行定位,提供其地理坐标。其中声学定位是重要且有效的定位方法,主要包含长基线、短基线以及超短基线定位技术。长基线系统构成组件多,布放较为复杂,定位精度高;短基线与超短基线基阵尺寸小,安装较方便,在水下设备定位中具有广泛的应用。超短基线水声定位系统确定水下目标位置是通过测量信号的到达方位和距离来定位的,而测向任务是通过测量信号到达接收基阵阵元之间的相位差来实现的,这是超短基线定位系统的关键。目前,法国Ixsea、挪威Simrad、英国Sonardyne等公司[1-2]都推出了中深水的商用超短基线水下声学定位系统产品,但对于其数据的处理与应用则很少提及。国内哈尔滨工程大学对超短基线定位技术进行了深入研究,目前已经研发成功可应用于深水作业的超短基线定位系统[3]。超短基线系统在水下作业过程中,由于背景噪声以及水下目标的运动,会出现无法跟踪目标,出现短暂定位失效问题,造成定位数据不连续,不能完整反映水下目标运动轨迹。本文以我国“向阳红10号”科考船装备的超短基线为例,在介绍超短基线水下声学定位技术的基础上,依据水下目标相对位置在空间和时间上的分布来识别定位跳点,并采用合理的数据结构与算法,实现对跳点的剔除,对数据缺失点进行插值,得到可信的连续水下声学定位数据,基于该技术还开发了相应的数据处理软件,并在4 500 m级AUV南海海试中得到了良好的应用。
1 超短基线水下声学定位技术
超短基线系统由船载部分与水下应答器构成。船载部分包括电子控制单元和换能器基阵,电子控制单元作为整个系统的控制系统,负责系统的运行;换能器基阵由一个发射换能器基元和4个接收换能器基元构成,发射基元发射声信号,接收换能器基元接收来自水下应答器的声信号,当水下应答器在接收到发射基元信号后,会发射应答信号,基阵的4个接收基元接收应答信号。通过计算不同接收换能器基元接收信号的时间差和相位差,获得水下应答器的具体位置。
超短基线基阵系统通常由一个位于中间的发射换能器、2组两两相距约50 cm的水听器组成,通过测量水下应答器的声信号到达水听器的时间差、相位差和目标到接收阵之间的斜距进行定位。其定位原理示意图如图1所示,图中Ox、Oy和Oz表示超短基线基阵的三维坐标系,r表示水下应答器与超短基线基阵之间的距离,θx表示r与x轴的夹角,θy表示r与y轴的夹角。

图1 超短基线定位原理Fig.1 Positioning principle of USBL
超短基线系统通过测量水下应答器到船底换能器基阵的声波传播时间来计算目标的斜距r,通过测量从目标到达基阵各水听器的声波相位差来计算目标的俯仰角和方位角,从而确定目标相对基阵的相对位置。
2 超短基线定位系统的校准和精度评估
本文对安装在“向阳红10”号船上的超短基线定位系统进行了校准分析,对采集的原始数据的异常值进行剔除、平滑等处理,对其定位精度进行评估。最后将位置信息和深度信息融合,转换到大地坐标下,生成目标体高精度的三维定位数据。
2.1校准和精度评估方法
超短基线定位系统在船上安装好以后,由于安装在船底的超短基线换能器基阵的三维坐标系与船体的三维坐标系不一致[4-5],有所偏差,因此需要通过对基阵的校准来求出基阵坐标系相对于船体坐标系在X、Y和Z三个方向上的偏差角,确保超短基线定位的可靠性,提高其定位精度。
习惯上认为基阵的X轴相对船体的偏差角为艏向偏差角、基阵的Y轴相对船体的偏差角为纵摇偏差角、基阵的Z轴相对船体的偏差角为横摇偏差角。
超短基线基阵进行校准前,先在试验海域进行CTD声速剖面测量,给超短基线定位系统提供声速剖面数据;超短基线基阵的校准地点选择海底较为平坦、水深约1 500 m左右的区域。开始校准时,将投放于海底的超短基线声学应答器作为校准应答器,保证罗经信号中艏向偏差角的精度在0.1°以内、纵摇偏差角和横摇偏差角的精度在0.01°以内。然后通过升降杆将超短基线基阵放至船底以下2 m,在系统调试正常后,为确保工作母船船底声学基阵工作的安全稳定,工作母船在应答器的上方以2~3 kn的速度按照“8”字形的轨迹运动2个周期,第1个周期的数据用于计算船底声学基阵相对于船体坐标系的偏差矩阵,第2个周期的数据用于计算船底声学基阵坐标系相对于船体坐标系在3个坐标轴方向上每个夹角的偏差。“8”字形的轨迹是为了确保母船的声学基阵相对声学应答器在各个不同的方向和距离上进行测试。考虑到有效定位数据统计需要,并结合船舶航行经济性,每个“8”字的圆圈直径约为1 000 m,按照厂家提供的要求[6],每次计算前保证该“8”字周期内的有效数据点数在80%以上才算合格。母船运动轨迹如图2所示,通过校准以后获得的校准矩阵用于更新基阵的偏差,基阵经过校准后,超短基线的定位精度必须达到斜距的0.3%以内。
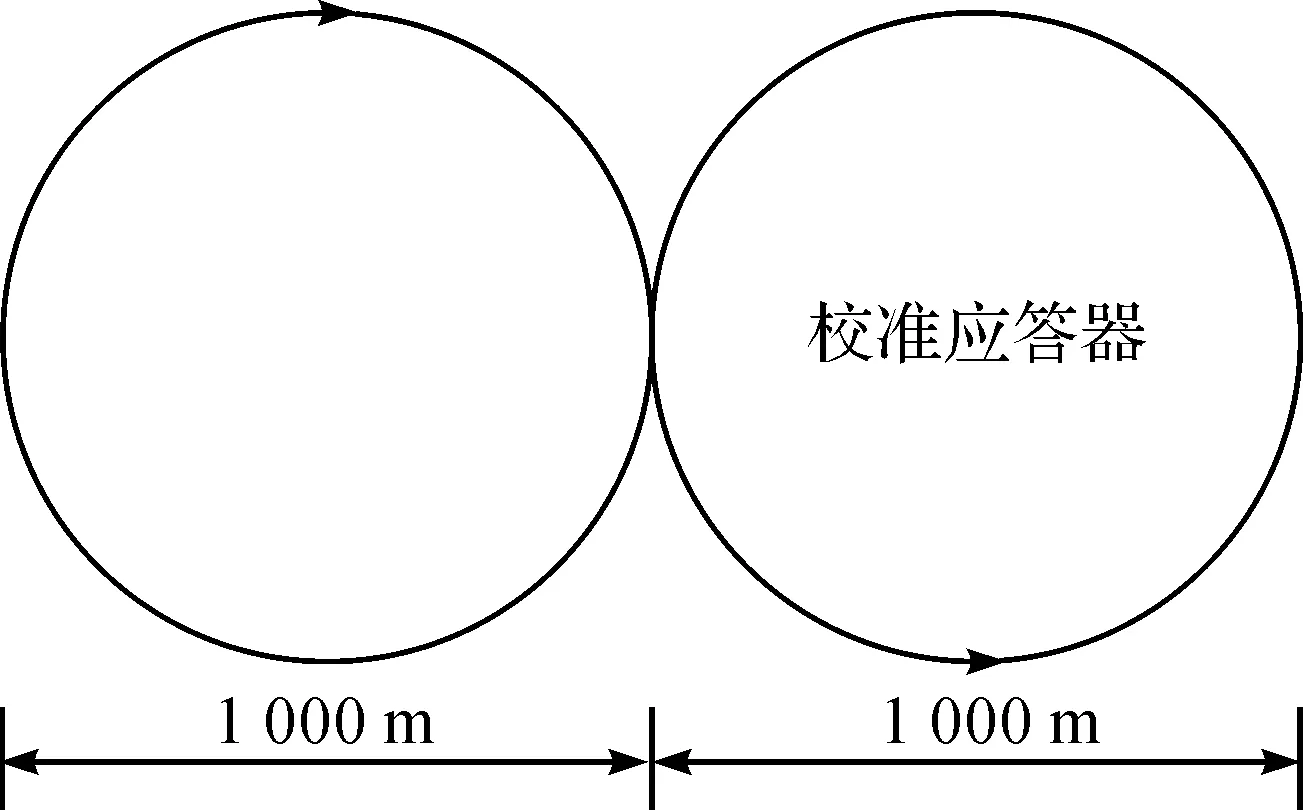
图2 基阵校准时的母船运动轨迹示意图Fig.2 Motion trajectory of vessel in acoustic antennacalibration
2.2校准和精度评估数据分析
2015年7月,选择在南海进行超短基线基阵的校准及精度评估试验,在良好的海况下,取得2组“8”字数据,列为A、B两组,应答器的定位数据分布情况如图3和图4所示。从图中可以看出,第1次校准的数据较为分散,主要分布在200 m×200 m的矩形范围内;第2次校准的数据较为集中,主要分布在20 m×20 m的矩形范围内。数据情况分析如表1所示,两组数据的有效数据比例都在80%以上,数据质量良好。
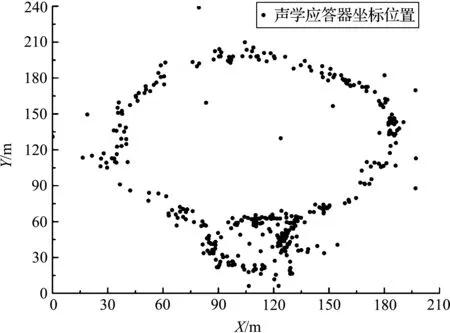
图3 声学应答器校准的第1次定位数据分布图Fig.3 The distribution diagram for the first positioningdata of acoustic transponder calibration
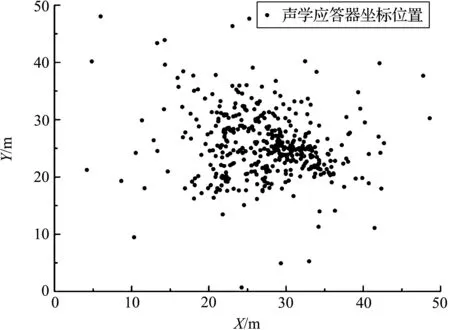
图4 声学应答器校准的第2次定位数据分布图Fig.4 The distribution diagram for the second positioningdata of acoustic transponder calibration

数据组号AB数据组数389447有效数据组数332371有效数据比例85.34%83%
根据船上罗经提供的数据,经计算得出基阵在3个方向上的角度偏差分别为:艏向偏差角-0.02°,纵摇偏差角+0.09°,横摇偏差角0.00°。
根据超短基线基阵测得的经度、纬度和深度数据计算标准差,计算得出基阵在X、Y和Z3个方向上的定位标准差分别为:4.01,4.01和1.49 m。
超短基线定位系统校准完成后,将基阵在3个方向上的偏差写入控制计算机,参照声学应答器的入水深度,求得超短基线基阵在30°、60°和120°三种开角下的定位精度分别为:0.20%,0.27%和0.61%。
综合以上的计算数据分析,发现该超短基线基阵经过校准之后,其基阵在60°开角内的定位精度能保持在斜距的0.30%之内,符合厂家提供的参数指标,满足海上设备的应用需求。
2.3超短基线定位系统数据处理软件在海上的应用
为方便科考队员在海上进行超短基线数据的快速处理,基于Matlab程序开发了一款超短基线数据后处理软件,该软件先对声学应答器定位跳点数据进行剔除,然后对剔除后的数据进行平滑滤波,并可以保存处理后的数据,并成图。图5是目标体定位的原始数据,图6是经该软件处理后的数据。
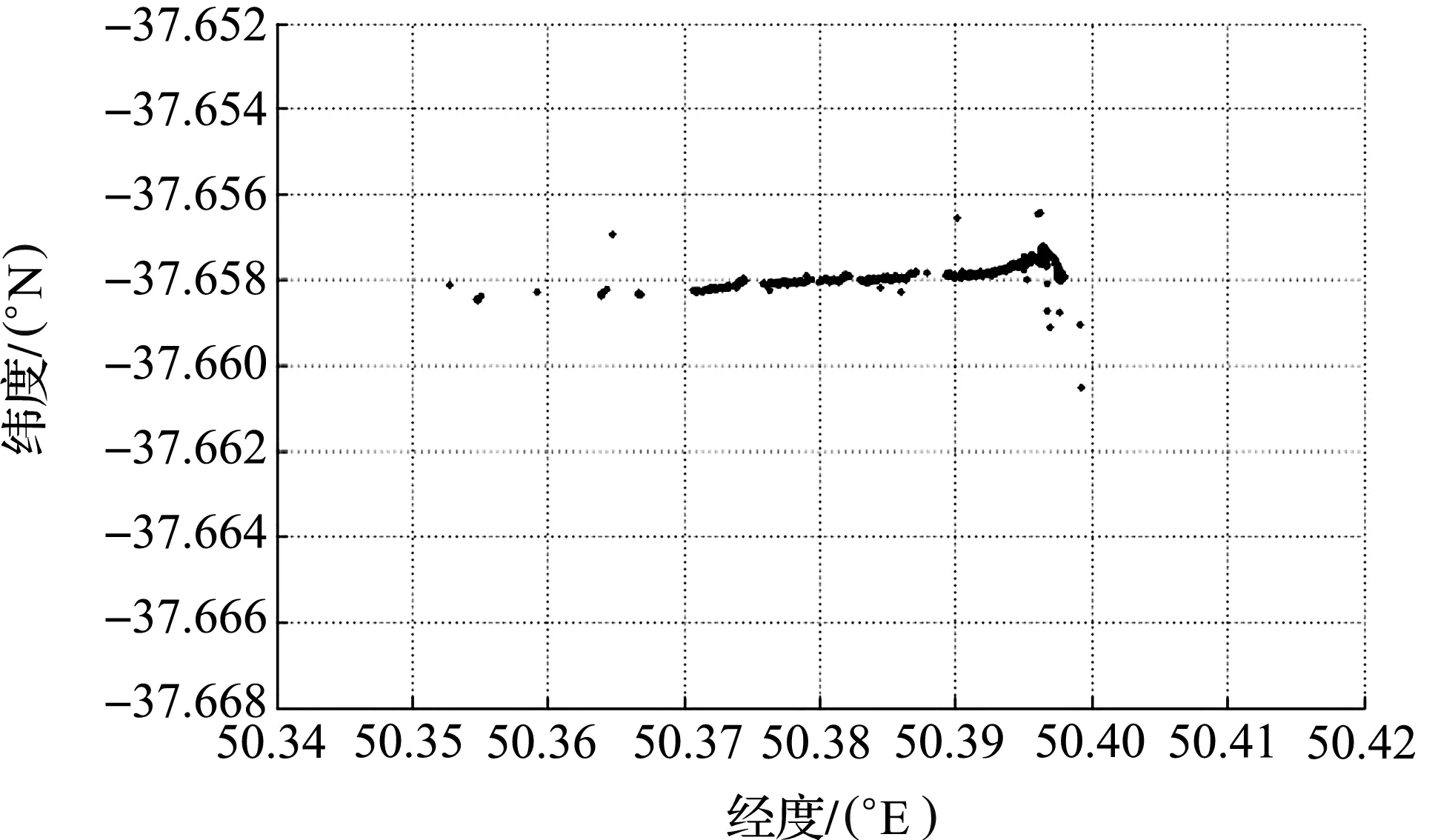
图5 声学应答器的原始定位数据Fig.5 Raw positioning data of acoustic transponder
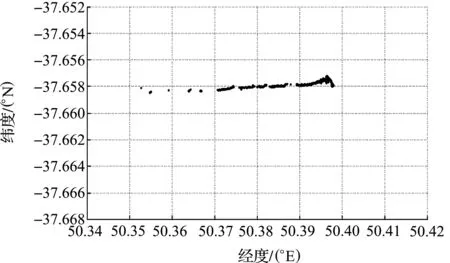
图6 经过软件处理后的数据Fig.6 Data after processing by software
从图5和图6的对比中可以看出,经过软件处理后的数据,跳点明显减少,数据曲线也光滑许多,提高了超短基线定位数据的处理效率。
3 小结
超短基线定位系统能方便快速地对水下目标进行定位,经超短基线基阵的海上校准试验,验证了该基阵的测量精度能满足海上设备的水下定位要求,超短基线的数据后处理软件也能实现数据的快速处理。由于受海况、船舶噪声、GPS信号、罗经信号等的影响,导致2次校准的差值较大,另可能因基阵安装位置的原因导致纵摇偏差角也较大,需要后期在基阵维护上注意。
目前,数据后处理软件只能进行简单的处理,未能做进一步的差值处理、误差分析以及精度评估等,有待进一步的改进。
致谢衷心感谢IXBLUE公司的Jared工程师和北京赛迪海洋技术中心的孙金明工程师对超短基线定位系统校准试验提供的帮助,感谢吴学文老师以及AUV海试全体调查队员的帮助与支持!
[1] WANG Zhi-ming, TIAN Chun-he. Underwater positioning error analysis of ultra-short baseline system[J]. Journal of Geomatics,2010,35(6):30-31.
汪志明,田春和.超短基线系统水下定位误差分析[J].测绘信息与工程,2010,35(6):30-31.
[2] GAO Guo-qing,YE Xiang-bin,QIAO Chun-jie, et al.Theory and error analysis of underwater acoustic positioning system[J]. Journal of Sichuan Ordnance,2010,31(6):95-97.
高国青,叶湘滨,乔纯捷,等.水下声定位系统原理与误差分析[J].四川兵工学报,2010,31(6):95-97.
[3] YANG Hai-quan,TANG Xiao-wei. Harbin Engineering University develop high precision”ultra short baseline positioning system” to break the international monopoly[EB/OL].http://www.wokeji.com/society/shehui/201410/t20141025_847127.shtml.
杨海全,唐晓伟.哈工程自主研发高精度“超短基线定位系统”打破国际垄断[EB/OL].http://www.wokeji.com/society/shehui/201410/t20141025_847127.shtml.
[4] LIU Wen-yong, JIANG Lin, QIAN Li-bing, et al. Ultra-short baseline underwater positioning calibration method: Discussion and analysis[J]. Bulletin of Surveying and Mapping,2011(1):82-93.
刘文勇,江林,钱立兵,等.超短基线水下定位校准方法的探讨与分析[J].测绘通报,2011(1):82-93.
[5] PHILIP DIPHS D R C. An evalnation of USBL and SBL acoustic systems and the Optimisation of methods of calibration-Part2[J]. The Hydrographic Journal,2003(109):10-20.
[6] ixblue .USBL-BOX positioning system user guide[Z].France: ixblue Co.,Ltd,2012.
The maritime applications and accuracy evaluation of ultra short baseline positioning
ZHOU Hong-wei1,2,ZHANG Guo-yin1,2,CAI Wei1,2,ZHANG Kai1,2
(1.SecondInstituteofOceanography,SOA,Hangzhou310012,China;2.KeyLaboratoryofSubmarineGeosciences,SOA,Hangzhou310012,China)
Ultra short baseline positioning system can provide accurate positioning information for underwater equipment. The positioning results of the ultra short baseline positioning system contain a variety of factors, the effective processing of the data is the essential prerequisite for position precision. In this study, the acoustic antenna was calibrated, the accuracy of the positioning data was evaluated, the maritime collecting data were analyzed and the gross points of the raw data were filtered and removed. Finally, the reliable results of underwater positioning thereby can be acquired.
ultra short baseline;underwater positioning;accuracy evaluation;gross points
2016-01-18
2016-05-16
国际海域资源调查与开发“十二五”课题资助(DY125-22-QY-04);浙江省公益技术应用研究项目资助(2016C33092)
周红伟(1987-),男,浙江建德市人,主要从事水下定位的应用技术及作业保障方面的研究。E-mail:zhw06011433@163.com
P733.2
A
1001-909X(2016)03-0076-04
10.3969/j.issn.1001-909X.2016.03.012
周红伟,张国堙,蔡巍,等.超短基线定位的海上应用及精度评估[J].海洋学研究,2016,34(3):76-79,doi:10.3969/j.issn.1001-909X.2016.03.012.
ZHOU Hong-wei,ZHANG Guo-yin,CAI Wei,et al. The maritime applications and accuracy evaluation of ultra short baseline positioning[J]. Journal of Marine Sciences, 2016,34(3):76-79, doi:10.3969/j.issn.1001-909X.2016.03.012.
猜你喜欢
声学与电子工程(2021年3期)2021-10-13
铁道通信信号(2020年9期)2020-02-06
水下无人系统学报(2018年5期)2018-11-09
电子制作(2018年2期)2018-04-18
水下无人系统学报(2017年5期)2017-11-22
弹道学报(2016年4期)2016-12-14
铁道通信信号(2016年4期)2016-06-01
西北工业大学学报(2015年3期)2015-12-14
雷达与对抗(2015年3期)2015-12-09
舰船电子工程(2015年4期)2015-03-15