大型复杂零件的三维扫描测量精度研究
2016-11-09 07:11郑鹏韩雨萌
电大理工 2016年3期
郑鹏 韩雨萌
沈阳工业大学机械工程学院(沈阳 110870)
大型复杂零件的三维扫描测量精度研究
郑鹏韩雨萌
沈阳工业大学机械工程学院(沈阳110870)
非接触式三维扫描仪能够快速地获取物体的三维点云数据,利用建模软件的数据合并、特征提取和曲面拟合等功能进行数据处理,重建物体的三维模型,具有精度高、速度快的优点。随着测量技术的不断发展,非接触式三维扫描仪在机械、汽车、航空、医疗、艺术等领域的应用日趋广泛。本文主要致力于研究非接触式三维扫描系统的扫描精度,从而更好地满足高精度、高效率以及适合各种曲面的数字化应用需求。
复杂型面;三维扫描;扫描误差;改善精度
三维扫描是集光、机、电和计算机技术于一体的高新技术,主要用于对物体空间外形和结构进行扫描,以获得物体表面的空间坐标。它的重要意义在于能够将被测物体的立体信息转换为计算机能直接处理的数字信号,为实物数字化提供了方便快捷的方法[1]。高速三维扫描及数字化系统在反求工程中发挥着巨大作用。三维扫描系统已在汽车、摩托车、家电等行业得到成功应用,而高速三维扫描仪已在我国多家模具厂点得到应用,取得良好效果[2]。它可以直接将大型复杂的、不规则的物体三维点云数据采集到电脑中,快速重构出所需的三维模型。三维扫描仪所采集的点云数据还可以进行多种后处理工作,例如分析、模拟、仿真、监测、展示、虚拟现实等。
釆用非接触式三维扫描仪对多种复杂型面进行扫描研究,在原有的扫描过程中,因仪器误差、物体自身因素误差、测量误差和测量误差等会造成测量结果不准确,从而使制造出的零件不准确,不能用于装配[3],所以本文分析这些误差并提高精度,使三维扫描技术向高精度、高可操作性、低成本的方向发展。
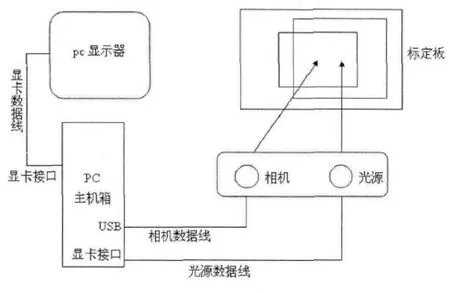
图1 三维扫描系统
1 非接触式三维扫描系统的组成与理论研究
1.1三维扫描系统组成
非接触式三维扫描是曲面扫描技术中一个很重要的分支,它具有检测速度快、无需接触实物等特点,在机械物体扫描、逆向工程、虚拟现实等方面得到了广泛应用,本文实验中所釆用的是非接触式三维扫描仪,主要由工业相机1个、光源1个(投影仪)、标定板1个、以及PC机1台组成,如图1所示。
三维扫描仪的主要硬件有:(a)工业相机;(b)光源;(c)标定板;(d)三脚架;(е)云台,如图2所示。

图2 三维扫描仪的主要硬件
1.2三维激光扫描仪的测量原理
如图3所示是三维激光扫描测量的示意图。三维激光扫描测量的原理是光学三角形法:利用具有规则几何形状的激光源投影到被测表面上,形成的漫反射图像在安置于空间某一位置的图像传感器上成像,按照三角形原理,即可测出被测点的空间坐标。
1.3三维扫描流程
扫描系统的工作过程主要是:投影仪对被测物体投射光源,工业相机经过内、外参数设置后将连续拍摄的图片传输给电脑,电脑接收到点云数据后进行格式转换并保存。三维扫描流程如图4所示:

图3 三维扫描测量示意图
3 影响激光扫描测量精度的因素
影响激光扫描测量精度的因素很多,总体上分硬件和软件两个方面硬件方面。主要有机械动平台、CCD摄像机、激光器等,从硬件方面提高精度,一般会增加成本。软件方面主要有物像对应关系标定、激光扫描线中心提取、被测物面表面特征、光学成像参数、光平面位置等因素。
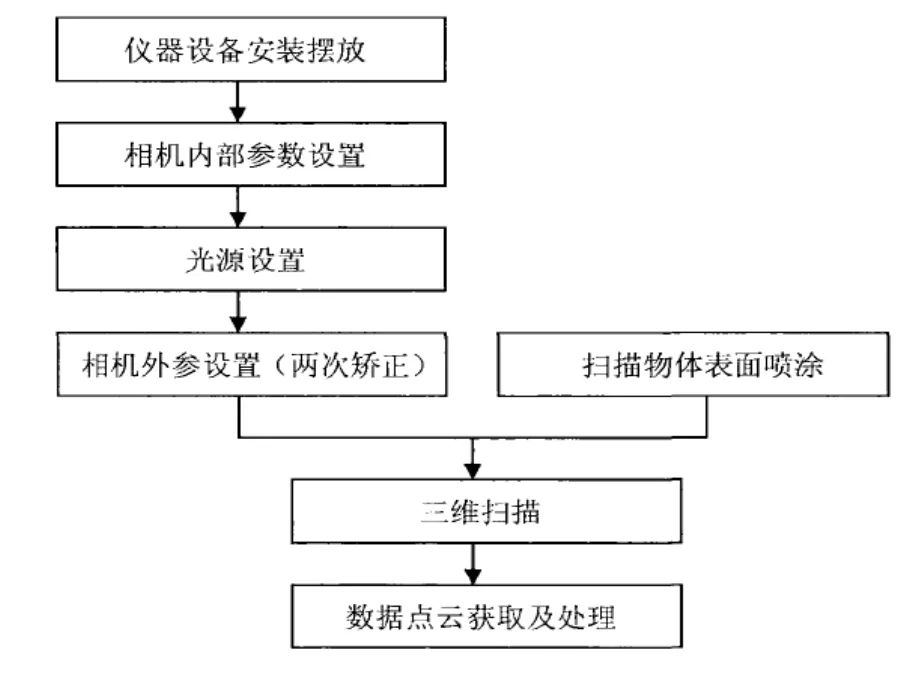
图4 三维扫描流程
(1)被测物体表面特征对测量精度的影响
被测物体表面的粗糙度、颜色、材质、倾斜角度影响激光扫描线的成像,是测量精度的重要因素。研究表明颜色浅的物体测量数据偏大,颜色深的物体测量数据偏小,颜色越深对测量结果的影响越大。
(2)激光扫描线中心提取对测量精度的影响
线激光发生器发出的激光有一定发散角,随着物面的景深、倾斜角度不同,激光扫描线图像的带宽是变化的,明暗度也在变化;此外,激光发生器发出的光经过透镜,其能量分布不均匀,也会产生测量误差。
(3)物像对应关系标定
物像对应关系标定时产生测量误差主要有两个方面:一是平台运动时的震动;二是物面粗糙、光能不均匀影响图像中心线采集;这两方面的原因都会给激光扫描测量带来误差。
(4)点云数据处理及模型重构误差
扫描得到点云数据后,点云数据处理及模型重构过程也会给最终的CAD模型带来误差。误差的来源主要有以下几个方面。
1)点云数据对齐带来的误差。由于扫描多个视图的数据后需要进行对齐,软件在对齐数据时可能产生偏差,产生偏差的原因可能是没有足够的对齐信息。这就要求扫描时要得到足够的重合数据,提供给软件进行对齐运算。但用于对齐的定标点并非越多越好,只要能保证数据的重合部分有三个定标点即可。
2)点数据精简误差。
为了后续处理方便,对庞大的数据进行精简。这时,精简掉的数据将会损失部分精度,如第二章中论述的游戏玩具模型三角片精简带来的误差。精简数据量要适中,认为一般不超过原始数据量的50%.
3)拟合曲线及曲面带来的误差。
由点云数据拟合成各种曲线曲面时不可避免的会引进误差,要实时检测拟合元素的误差,以期把重构精度控制在一个满意的范围内。
4 系统误差成因及对策
(1)扫描过程的误差
扫描过程不可避免的会带来误差,由于扫描设备制造误差,原理性误差,扫描操作者引起的不确定性因素等等都会带来误差。设备误差主要是由于设备本身制造精度,零部件的老化破损等机械结构引起的误差。原理性误差是由扫描设备测量方法决定的,比如光学非接触式测量精度就无法达到接触式三坐标测量仪的精度,这是由设备本身的局限性引起的。人为误差是指操作者由于经验,误操作等因素引起的误差,如设备校准等操作不合适等。此外,扫描精度还受到环境的影响,这也是引起误差的一个主要来源。在实际的测量当中会遇到一些大型零件户外的测量等环境比较恶劣的情况,环境的温度,光线,振动等都会影响到测量的精度。针对这种情况,可以采取以下措施来尽量减少误差。
1)测量金属件等反光强的模型可以喷显影剂,减少模型的反光。显影剂一般是一种白色粉末状的固体微粒,可以减少物体的反光。
2)测量时避免环境光线的变化,如采用白光测量,如3DSS-STD-II数字化三维扫描仪,则建议在较暗的环境中测量效果比较好。
3)尽量避免测量区域内人员走动等。REV-scan激光三维扫描仪,釆用手持式扫描方法,对操作者的素质要求较高,扫描时手部的抖动,移动不合理也可以导致测量误差的加大。扫描时尽量避免手部上下抖动,移动速度较缓慢且要均匀。此外,喷洒的显影剂也会带来误差。显影剂是固体微粒,自然会引起误差。显影剂喷洒不均匀也会引起,应该尽量避免。总之,扫描过程有诸多引起误差的因素,要遵守操纵规范,调整合适的扫描参数,把误差降到最低程度。
(2)圆心定位不准确引起的误差
真实实验摄像机是广泛应用的CCD摄像机,是由SONY公司生产的,型号为SONY XC-ST70,其分辨率为768×572像素。拍摄标定板图像时,将标定板完全置于摄像机视场,同时保证位于标定板中心的标定点与图像中心大致重合,调整摄像机和标定板之间的距离。分别在距离为600mm、650mm、675mm、700mm、725mm、750mm、800mm的情况下拍摄多幅标定板图像,然后分别利用曲线拟合法、加权曲线拟合法和高斯曲面拟合法计算标志点圆心.
目前,常用的衡量亚像素定位算法的方法,主要有标准参考物检测法和仿真图像检测法两种。
本文摄取一组位于同一直线上的圆标志点,然后分别求解得到这些点在图像上的圆心数据,并认为这些数据是相互独立的。由于直线投影不变性,图像上的圆心仍然位于同一直线上。即有:

其中,n为该直线上标定的个数。理想情况下,拟合参差ε为零,实际上由于定位误差的存在,ε不可能等于零,其值与定位误差的大小一致,本文以此直线拟合的残差值来比较各种圆心数据的定位算法的精度。为了使各组间残差具有一致的衡量标准,对(1)式进行归一化处理,即令:
经过归一化处理后,该对于任意一点的参差值等价于该点至拟合直线的距离。由于我们使用的摄像机拍摄的图像存在畸变,畸变会使直线的投影发生弯曲,从而使得式(1)中的拟合参差值不为零。在一阶径向畸变模型下,畸变像点相对于理想像点的偏移是沿着径向的,畸变像点位于理想像点和成像中心的连线上。因此,如果存在一条直线的投影过成像中心,则畸变对该直线的直线度没有影响,即满足拟合参差为零。只要使投影直线尽可能通过成像中心,同时拟合直线时尽可能选择成像中心附近的点,则畸变因素对直线度的影响可以忽略不计。按上面的要求拍摄多幅标定板图像,然后分别利用曲线拟合法,加权曲线拟合法和高斯曲面拟合法求解标定点圆心,然后拟合直线,每幅图像只选择一条直线,各算法的拟合参差比较如下:
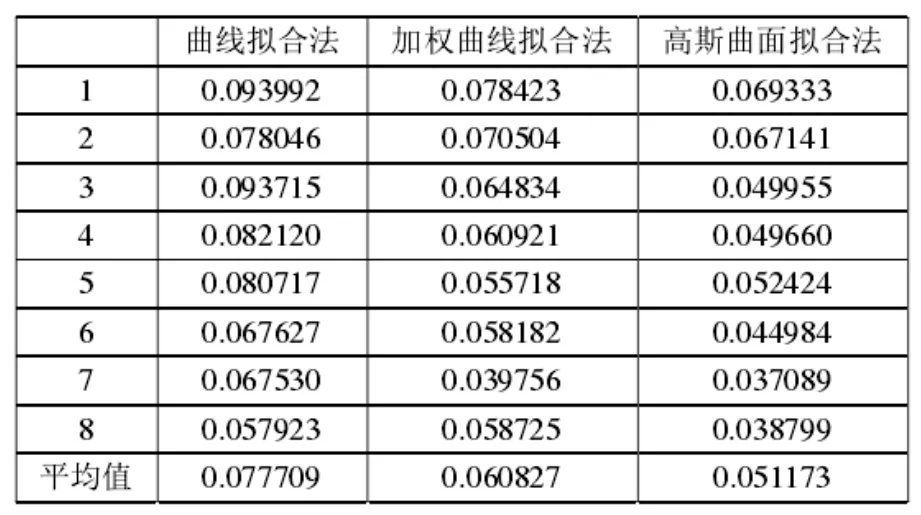
表1 各种算法的精度比较
从表1的数据可以看出,考虑目标边缘灰度过渡区域的加权曲线拟合定位算法比一般的仅考虑周线的曲线拟合定位算法的精度要高,这也说明了,目标圆心的信息不仅仅蕴涵在目标区域,同时也蕴涵在边缘处的灰度过渡区域。而完全建立在圆目标灰度分布模型上的高斯曲面拟合法的精度大体上比加权曲线拟合法的定位精度更高一些。
(3)点云数据处理及模型重构误差
扫描得到点云数据后,点云数据处理及模型重构过程也会给最终的CAD模型带来误差。误差的来源主要有以下几个方面。
1)点云数据对齐带来的误差。由于扫描多个视图的数据后需要进行对齐,软件在对齐数据时可能产生偏差,产生偏差的原因可能是没有足够的对齐信息。这就要求扫描时要得到足够的重合数据,提供给软件进行对齐运算。但用于对齐的定标点并非越多越好,只要能保证数据的重合部分有三个定标点即可。
2)点数据精简误差。为了后续处理方便,对庞大的数据进行精简。这时,精简掉的数据将会损失部分精度,如第二章中论述的游戏玩具模型三角片精简带来的误差。精简数据量要适中,本文认为一般不超过原始数据量的50%.
3)拟合曲线及曲面带来的误差。由点云数据拟合成各种曲线曲面时不可避免的会引进误差,要实时检测拟合元素的误差,以期把重构精度控制在一个满意的范围内。
[1]周吉清,董翠芳,廖小兵.三维扫描技术及应用[J].出版与印刷.2007,(4):45-47
[2]金涛,童水光.逆向工程技术[M].北京:机械工业出版社.2003.
[3]郭勤静.逆向工程关键技术研究及误差因素分析[D],昆明理工大学,2008.(23).
(责任编辑:文婷).
P207+.1
A
1003-3319(2016)03-00015-03
10.19469/j.cnki.1003-3319.2016.03.0015
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09
中学生数理化·高一版(2020年1期)2020-02-20
模具制造(2019年3期)2019-06-06
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
科普童话·百科探秘(2015年4期)2015-05-14
现代营销·经营版(2015年3期)2015-04-20
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10