空中多飞行器飞行轨迹优化数值仿真
2016-11-10 08:17吕开妮胡海龙
指挥控制与仿真 2016年5期
吕开妮,胡海龙,南 英,蒋 锋
(南京航空航天大学,江苏南京 210000)
空中多飞行器飞行轨迹优化数值仿真
吕开妮,胡海龙,南英,蒋锋
(南京航空航天大学,江苏南京210000)
针对空中多飞行器在复杂环境中飞行轨迹的多目标最优问题,分析了多飞行器飞行过程中各种可视和不可视约束条件。基于在回避威胁区前提下燃料消耗最少、飞行时间最短的综合性能指标,采用“多方法组合”思路,提出了改进动态规划法和多点边值法组合算法,并进行了仿真验证,大量C++数值飞行仿真结果表明该算法能够在考虑外界复杂环境和飞行器各种约束条件下快速规划出空中多飞行器的最优飞行轨迹,该组合算法具有一定的实用性和创新性。
众多飞行器;轨迹优化;飞行数值仿真;C++计算机仿真
随着空中交通量的逐年大幅度增加导致了空域资源紧张,空中交通的拥挤为全球的航空航天事业发展带来了巨大的挑战。威廉·克顿在1965年首先提出了自由飞行的概念[1],美国航空无线电委员会对自由飞行的定义为:“自由飞行是在仪表飞行规则下的一种安全有效的体系,在该体系中,飞行员可以更灵活地选择适合自己的航路和速度”。复杂环境中多飞行器最优飞行轨迹是实现自由飞行的重要技术,民航飞行首要关注因素是安全性,重要性能指标是路径最短、能量最省。在有限空间区域内尽可能多的飞行器在安全飞行(不发生碰撞)的前提下规划最优路径,民用飞机体现在充分利用有限空域和节省燃料,军用飞机体现在多飞行器协同作战,在现代高科技技术体系化战争中,多架(种)飞行器按照一定的协同方式攻击目标,这种协同作战方式也是未来战争中主要的作战方式[2]。
空中多飞行器轨迹优化方面,文献[3]提出了基于进化算法的多飞行器航迹规划方法,文献[4]提出了基于协同进化的多飞行器轨迹优化方法,以时间最短和航迹代价最小为优化性能指标进行协同航迹规划。文献[5]提出了一种无人机群协同的分步规划航迹法,首先基于威胁所在和目标要求构造Voronoi图,用来搜索生成最初的航迹,采用威胁程度和耗油量两个指标的加权和形式来衡量航迹的优劣。文献[6]将航迹规划看为一个混合整数约束条件下的线性规划问题,采用MILP法寻找机群避免障碍和碰撞的最优轨迹。文献[7]采用了基于遗传算法的路径规划策略,并与传统的动态规划法做了比较,显示其优越性的同时,也指出现阶段遗传算法存在比较费时的问题。文献[8]研究了两种分别以燃料消耗最少和爬升时间最短为优化目标的轨迹模型,但文中所采用的模型相对真实飞行模型做了不同程度地简化,而且也未考虑各种复杂飞行环境,使得规划出的轨迹较难应用于实际飞行中。目前国内外大多数文献研究主要集中在多架无人机协同最优轨迹、单架民机飞行过程中各个阶段的最优轨迹,对于复杂环境下民机实时在线快速规划飞行轨迹问题文献相对较少。
本文的创新点在于考虑民机飞行轨迹实时在线规划性能和安全性能,考虑了三种典型飞行环境,改进了动态规划法,提出了组合算法的思路。本文考虑的典型飞行环境主要有三大类:一是要求飞行器路过给定的任务点[9-12],二是要求飞行器躲避(或绕开)威胁区(或飞行禁区)[13-15],三是卷风风场的存在。本文针对以上三种复杂环境对空中多飞行器轨迹优化采用改进的动态规划和基于共轭梯度的多点边值组合算法进行建模仿真。动态规划法的优点是计算原理简单、精确度相对较高[2],计算时间较快,所得最优轨迹误差相对较小,因此其仍是解决飞行器轨迹优化问题的有效和实用方法。
该空中多飞行器飞行轨迹优化研究的关键问题是:众多飞行器轨迹优化时,存在着两类约束条件一可视化的约束条件与无形不可视的约束条件,可视化约束条件为三维几何空间中具有明显边界条件的空间区域约束(如飞行禁区、任务点),无形不可视约束条件为三维几何空间中没有明显边界条件的其它飞行条件约束(如飞行器动压、过载、随机风场约束等)。通常的轨迹优化数值算法难以高精度准确可靠地全部同时满足这两类约束条件,因此,提出一套组合优化算法:改进动态规划法+多点边值算法,详细内容叙述如下。
1 复杂环境多飞行器飞行轨迹优化问题描述
众多飞行器在复杂飞行环境中的最优轨迹规划,要求全部飞行器从各自起始点飞行至最终目标点。在飞行过程中,要优化以下飞行性能指标:
1)有效充分利用风场能量、飞行燃料消耗最少;
2)使全部飞行器飞行路程最短或飞行时间最短;
3)飞行最安全,即回避全部飞行禁区,或飞行器相互碰撞;
4)最可靠准确地飞行路过目标点,并最终到达飞行指定终点,完成空中飞行任务。
使得
(1)
最小,式中,Pj(x,h,z)是飞行任务点,Aj(x,h,z)是飞行禁区,W(x,h,z)是风速度矢量与风加速度矢量随3-维几何空间的分布函数,t是飞行时间,kq(q=1,2,…,5)是加权系数。
飞行过程中,考虑以下约束条件:
1)路径的可视约束之一:飞行初始起点与终端点约束
飞行器飞行轨迹的初值和终值条件如下:h(0)=h0V(0)=V0m(0)=m0γ(0)=γ0ψv(0)=ψv0h(f)=hfV(f)=Vfm(f)=mfγ(f)=γfψv(f)=ψvf
2)路径的可视约束之二:飞行器必须回避的飞行禁区以及各架飞行器之间相互不碰撞,即
回避飞行禁区:
Traji(t,x,h,z)i∉Aj(t,x,h,z)
i=1,2…n; k=1,2…m
各架飞行器之间相互不碰撞:
Traji(t,x,h,z)i∉Trajj(t,x,h,z)
i=1,2…n; j=1,2…n(j≠i)
di,j>dSafety,i≠j
i=1,2,3…,imax; j=1,2,3…jmax
(2)
式中,di,j为第i架和第j架飞行器在同一时刻的相互距离,dsafety为安全飞行距离。
3)路径的不可视约束之一:控制量约束
受机动性能等因素的影响,飞行器在复杂环境飞行过程中,要满足一定的状态量和控制量约束,以保证飞行器的正常飞行。因此,建立如下约束条件:
αi,min≤α≤αi,max
σi,min≤σ≤σi,max
Ti,min≤T≤Ti,max
(3)
4)路径的不可视约束之二:飞行器运动过程受到最大(机动)过载、和其他飞行器子系统参数pi的约束:
ni,min≤ni(t)≤ni,max
pi,min≤pi≤pi,max
(4)
5)路径的不可视约束之三:每架飞行器的飞行过程受以下非线性运动微分方程约束:
(5)
2 多飞行器的飞行仿真系统模型
2.1飞行器模型
飞行器的模型主要包括:气动力特性(阻力系数和升力系数等)、推力特性模型,在式(4)中单架飞行器只考虑引力、气动力、推力、大气特性(如随机风场等)条件的运动微分方程如下[13]:
TX=Tcosαcosβ
TY=T(sinαcosσ+cosαsinβsinσ)
TZ=T(sinαsinσ-cosαsinβcosσ)
(6)
式中,Cx,Cy分别为阻力系数和升力系数,S为参考面积,q为动压,aWy,aWz为风加速度,VWx,VWy,VWz为风速度(在地面坐标系中)。T是在飞行条件下(即飞行高度和马赫数)发动机的推力大小,TX,TY,TZ分别是X,Y,Z轴推力的大小;β是侧滑角,ISP是发动机比冲。
2.2飞行环境模型
规划空间内有Π个飞行禁区,飞行禁区是指飞行器不可进入区域,对这些区域只可以绕行。在进行航迹规划数值仿真时,将飞行禁区抽象为一个圆形区域,其主要参数是中心位置坐标和区域半径。飞行任务点是指飞行器在规划空间内,必须要执行的任务且该飞行任务与飞行时间无关,在进行航迹规划数值仿真时,将静态飞行任务抽象为一个点,其主要参数为中心位置坐标[2]。
2.3风场模型
风场模型为3维,即风速与风场加速度大小与方向随着经纬度、高度而变化,某区域典型卷风风场模型如图 1所示,中心速度为5m/s。
图1 卷风风场模型
3 改进的动态规划法+多点边值算法
飞行器四维飞行轨迹由改进的动态规划法和多点边值算法求解,具体计算步骤如下。
把全部飞行器的运动微分方程式(4)转化成非线性离散化的状态差分方程:
xi(k+1)=f′(xi(k),ui(k),wi(k),pi(k),k)
i=1,2,…n,k=0,1,…N-1
(7)
首先采用改进的动态规划法求解满足可视性约束条件空中多飞行器近似最优轨迹。计算步骤由N+1步组成:
第一步,计算xi(0)~xi(1)的轨迹。
其中,xi(0)=xi0,ui(0)∈Φi(0),ui(0)为第一步动态规划的决策变量,Φi(0)为第一步动态规划的允许决策集合。


其中,ui(1)∈Φi(1),ui(1)为第二步动态规划的决策变量,Φi(1)为第二步动态规划的允许决策集合。
xi(2)=f(xi(1),ui(1),wi(1),pi(1),1),可以求得ui(1)与J2*[xi(2),2]。
……
第N步,计算xi(N-1)~xi(N)的轨迹。

第N+1步,由上述N步求得的最优决策变量得到全部飞行器最优控制决策变量和近似最优飞行轨迹。采用微分法,获得全部飞行器近似飞行速度和加速度,以及相应的控制变量序列。
然后在无形可视性约束条件下,基于最优控制中的极值原理与共轭梯度法,采用多点边值算法,以动态规划法得到的控制变量序列作为初值,进行多目标轨迹优化而求得最优控制律。关于多点边值问题的求解算法简述如下:
由动态规划法得到的全部N段飞行器近似最优轨迹xi(k)(k=0,1,2,…,N),从起点飞行状态xi(0)开始,以每一段飞行轨迹的末端为约束,每段的起始点飞行状态xi(k)(k=1,2,…,N-1)均为上一段由两点边值问题求解获得的末端飞行状态点xi(k-1),即
(8)
由此,逐段求解两点边值问题[2],便可得到满足全部各种约束条件所有飞行器的四维飞行轨迹(t,V,γ,ψV,x,z,h,m)|i和飞行控制律ui。
4 飞行数值仿真
本文考虑15架Boeing747-200飞机在有无风场、威胁区以及任务点三种飞行环境情况数值仿真,在水平面内的飞行距离为500km,飞行高度为8 km。算例一:无风场、无任务目标点、存在飞行禁区;算例二:存在随机卷风风场、任务目标点以及飞行禁区。全部最优飞行轨迹与最优控制变量仿真结果如图2-8所示(以下圆形区域表示飞行禁区,黑色实点表示任务目标点)。ni,max=4(g),Ti,min与Ti,max是取决于Boeing-747-200飞机模型,即是由飞机在飞行过程中随着飞行马赫数与高度确定。
图2 无风场、无任务目标点、有飞行禁区时3-D飞行轨迹

图3 无风场、无任务点、有飞行禁区时轨迹倾角、偏航角和速度的变化
算例一:在无风场、无任务目标点、存在飞行禁区时,15架飞机的最优飞行轨迹,如图2-5所示。
图4 无风场、无任务点、有飞行禁区时飞机质量随时间变化
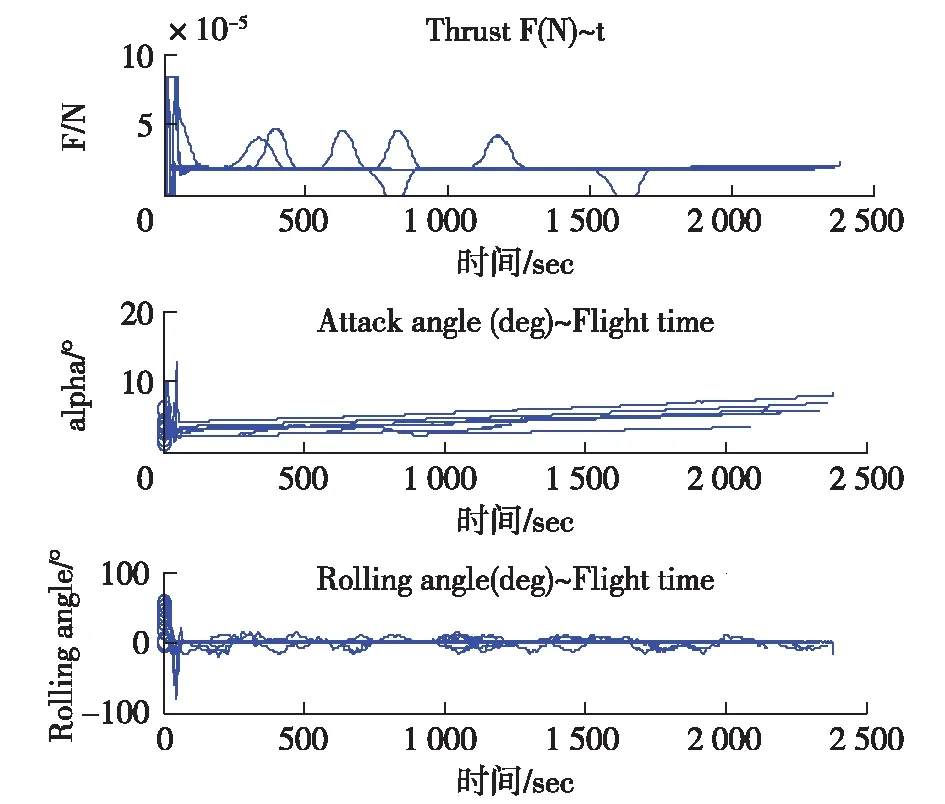
图5 无风场、无任务目标点、有飞行禁区时的飞行控制变量(推力、攻角和滚转角)随时间变化
算例二:存在随机卷风风场、存在任务目标点、存在飞行禁区时15架飞机的最优飞行轨迹,如图6-9所示。
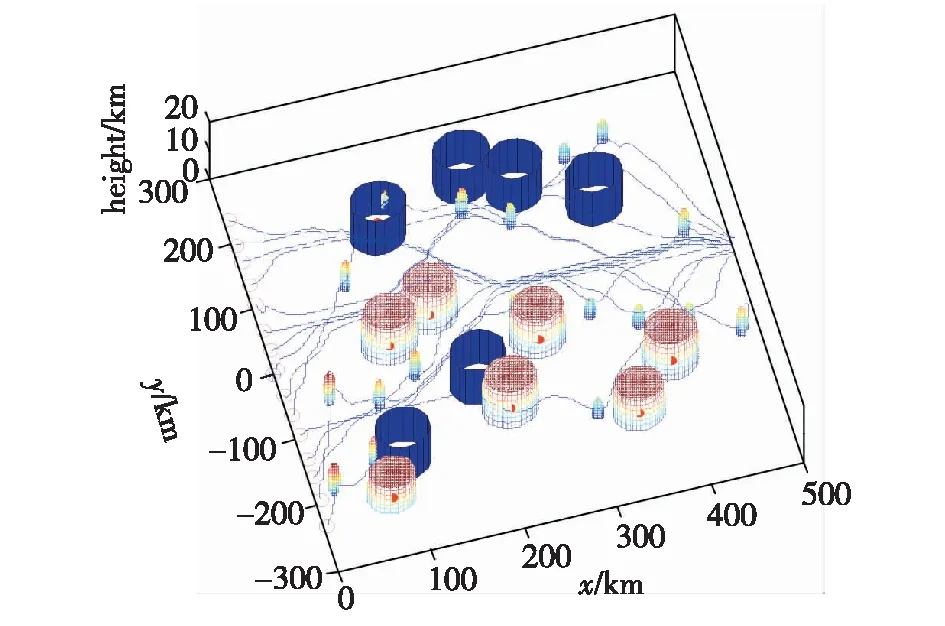
图6 有风场、任务目标点、飞行禁区时3-D飞行轨迹
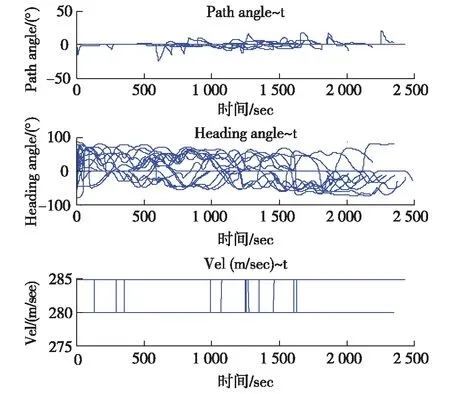
图7 有风场、有任务目标点、有飞行禁区时轨迹倾角、偏航角和速度变化
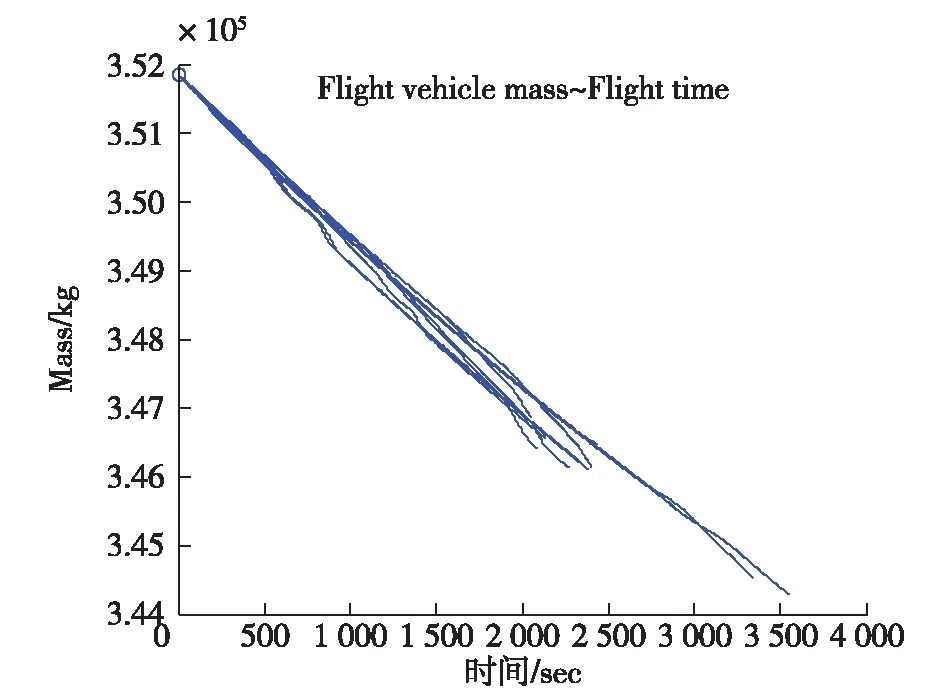
图8 有风场、任务目标点、飞行禁区时质量随时间变化
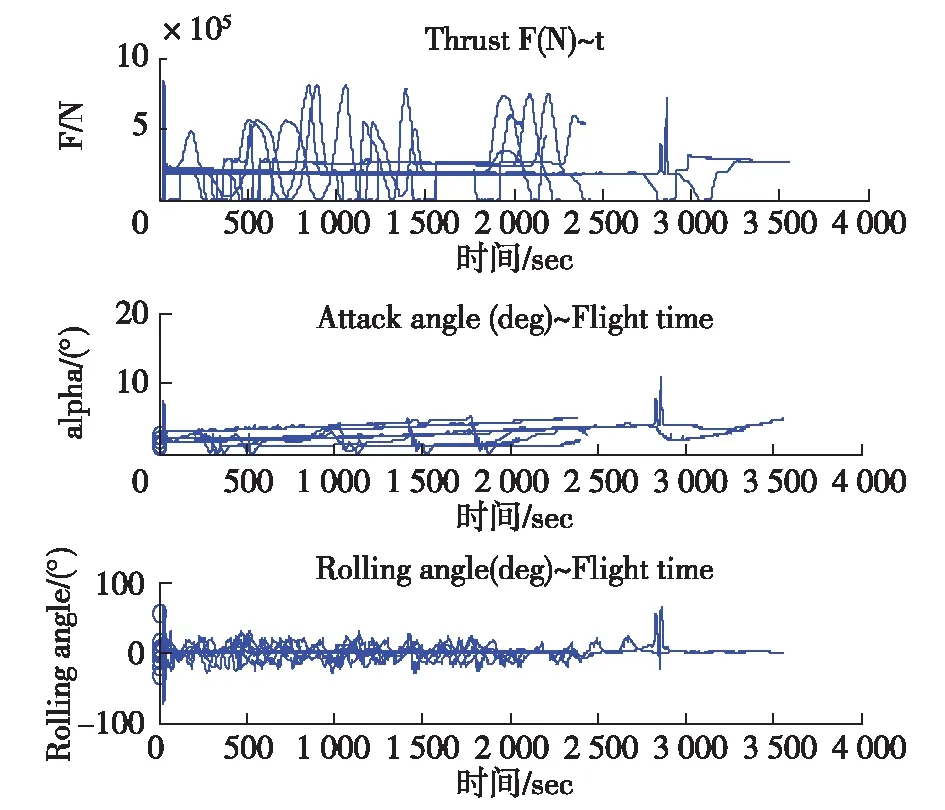
图9 存在风场、任务目标点、飞行禁区时的飞行控制变量(推力、攻角和滚转角)随时间变化
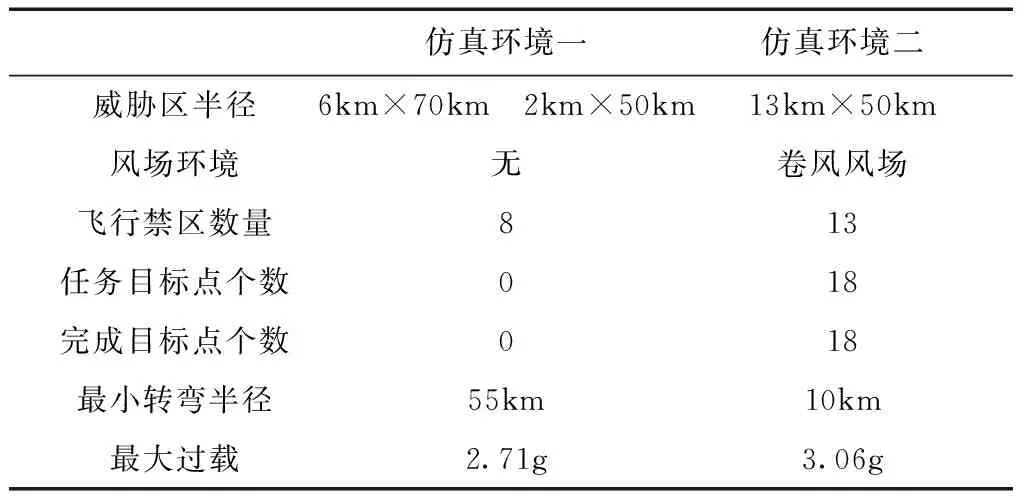
仿真环境一仿真环境二威胁区半径6km×70km 2km×50km13km×50km风场环境无卷风风场飞行禁区数量813任务目标点个数018完成目标点个数018最小转弯半径55km10km最大过载2.71g3.06g
5 仿真结果分析
由图2和图3知,15架飞机自起始点开始飞行,都避开或者绕过了飞行禁区,由图4知在无风场、无任务目标点但存在飞行禁区的条件下,飞机的轨迹倾角没有大的变化,均保持在-5×10-5°~+5×10-5°,所有飞机保持在平飞状态,飞行时间大约为2000s,由表1可知,此时飞机飞行过程中的最大过载为2.71g,飞机基本无大的机动,满足民航飞机处在巡航段时,飞行过程中最大过载不超过4g,保证乘客舒适度的要求。
由图4质量变化关系可知,起始飞行质量为3.52×105kg,最终到达目标点时飞机质量为3.468×105kg,飞机在2000s飞行过程中质量消耗为5200kg,由图5可知此环境下飞机的攻角、滚转角均保持在小的角度变化,再次说明此阶段在回避飞行禁区时飞机保持平稳、无大机动飞行,满足民航飞行过程中平稳舒适要求。
由图6和图7可知,15架飞机在风场、目标点以及飞行禁区环境下自起始点开始飞行至终点过程中,都回避了飞行禁区且通过目标任务点,飞机的轨迹倾角和偏航角较图3比较可以看出,飞机飞行的攻角和滚转角较第一种情况变化幅度增加,这与目标点设置坐标有关,由于飞行禁区存在,飞行器X,Y,Z轴的速度分量变化大,同时有风场的存在使得飞机所受扰动增大,飞行平稳性不可避免地受到影响这也说明复杂飞行环境加大了飞机操控性的难度,符合实际飞行规律。由图9知飞行禁区、风场、目标点的存在使得飞机攻角、滚转角以及推力较图4均有大的变化,攻角、滚转角的增大导致推力稍有增加,从而飞机的最大过载增加,但均保持在正常范围之内。由图8可知,飞行过程的复杂也增加了飞行时间和燃油消耗,飞行过程中质量消耗为5900kg-7900 kg,由表1可知飞机最大过载为3.06g,满足民航飞行要求。
6 结束语
对于民航飞机,飞行过程中的安全可靠性、舒适性和燃油消耗最少是在完成任务情况下首要关注的目标,也是该改进组合算法与飞行仿真的主要优化指标。通过对以上两个算例的仿真结果总结分析可知,在复杂飞行环境下,该组合优化算法可以在较短时间内(即在0.125s内)实时在线准确可靠地规划出空中多架飞行器的最优飞行轨迹,并且规划的每条最优轨迹距离与通过的目标任务点的距离不超过10m,这也体现了该算法的高精度性,在满足可视化的约束条件与无形不可视的约束条件下,同时满足了民航客机飞行的各项技术指标要求。
该优化算法与仿真的结果可以应用在实际中,如:满足飞过全部任务目标点、躲避全部飞行禁区,考虑不同的风场、扰动、雷电等自然环境,并充分(借助)利用随机风场的能量,由表1知所有飞机在飞行过程中准确路过全部任务点完全避免了飞机飞行的风险,确保舒适度,最终安全可靠、高精度准确地到达飞行着陆区。
[1]赵元棣,孙禾,王洁宁.基于K-近邻的自由飞行冲突探测研究[J].交通运输系统工程与信息,2013,13(6):169-170.
[2]黄国强.多飞行器协同轨迹优化设计[D].南京:南京航空航天大学,2012.
[3]W.Zhang,M.S Brajinjcky,and S.M.Philips,"Stability of net-worked control systems[J].IEEE Control Syst.Mag.,vol.21(1):84-99.
[4]J.W.Overstreet,A.Tzes,An internet-based real-time control en-gineenng laboratory[J].IEEE Control Syst.Mag.vol.19,5:19-34.
[5]McLain T W,Beard R W.Trajectory Planning for Coordinated Ren-dezvous of Unmanned Air Vehicles[R].Guidance,Navigation,and Control Conference and Exhibit,AIAA-2000-4369,2000.
[6]Richards Arthur,How Jonathan P.Aircraft Trajectory Planning with Collision Avoidance Using Mixed Integer Linear Programming [C].Proc.of the American Control Conference,2002.
[7]Pellazar Miles B.Vehicle Route Planning with Constrains Using Genet-ic Algorithms[C].Proc.of the IEEE.National Aerospaace and Electron-ics Conference,1994: 111-118
[8]王宏志.基于遗传算法解决飞机优化爬升问题研究[D].西安:西北工业大学,2005,
[9]Whang I H,Whang T W.Horizontal Waypoint Guidance Design Using Optimal Control [J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(3): 1116-1120.
[10]Hong Yang,Yi-yuan J Zhao.Efficient Trajectory Synthesis Through Specified Waypoints[C].AIAA 3rd "Unmanned Unlimited "Technical Conference.AIAA-2004-6525.
[11]Francesco Baralli,Lorenzo Pollini,Mario Innocenti.Waypoint-Based Fuzzy Guidance for Unmanned Aircraft A New Approach[C].AIAA Guidance,Navigation,and Control Conference and Exhibit.AIAA-2002-4993.
[12]Mario Innocenti,Lorenzo Pollini,Demetrio Turra.Guidance of Unmanned Air Vehicles Based on Fuzzy Sets and Fixed Waypoints [J].Journal of Guidance,Control,and Dynamics.2004,27(4): 715-720.
[13]Kevin B.Judd,Timothy W.McLain.Spline Based Path Planning for Unmanned Air Vehicles[C].AIAA Guidance,Navigation,and Control Conference and Exhibit,AIAA-2001-4238.
[14]Shannon Twigg,Anthony Calise,Eric Johnson.On-LineTrajectory Optimization Including Moving Threats and Targets[C].AIAA Guidance,Navigation,and Control Conference and Exhibit,AIAA-2004-5139.
[15]Arvind.U.Raghunathan,VipinGopal,Dharmashankar Subramanian,etc.3D Conflict Resolution of Multiple Aircraft Optimization [C].AIAA Guidance,Navigation,and Control Conference and Exhibit,AIAA-2003-5675.
Numerical Simulation of Trajectory Optimization for Multiple Aircraft
LV Kai-ni,HU Hai-long,NAN Ying,JIANG Feng
(Nanjing University of Aeronautics and Astronautics,Nanjing 210000,China)
This paper in view of the air vehicle flight path in the complex environment of multi-objective optimal problem analyzes more aircraft flying in the process of all kinds of visible and invisible constraints conditions.Based on evade the threatened area provides fuel consumption at least,the flight time shortest comprehensive performance indicators,a "multi-method combination" idea,an improved dynamic programming method and multi-point boundary value method combining algorithm,and the simulation results,a lot of value flight simulation results show that the algorithm can consider the external environment and the complex aircraft under various constraints to quickly map out the air more optimal flight path of the aircraft,the combining algorithm has a certain practicality and innovation.
multiple aircraft; trajectory optimization; flight numerical simulation; computer simulation by C++
1673-3819(2016)05-0096-06
2016-05-04
2016-07-01
吕开妮(1992-),女,陕西西安人,硕士研究生,研究方向为飞行器轨迹优化。
胡海龙(1990-),男,工程师。
南英(1964-),男,教授,博士生导师。
蒋锋(1990-),男,研究员。
V448.2;E917
ADOI:10.3969/j.issn.1673-3819.2016.05.021
猜你喜欢
小学生学习指导(高年级)(2022年5期)2022-06-02
小学生学习指导(中年级)(2022年5期)2022-06-01
小学生学习指导(低年级)(2022年5期)2022-05-31
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
科技研究·理论版(2021年20期)2021-04-20
海外星云(2016年7期)2016-12-01
北京航空航天大学学报(2016年6期)2016-11-16
中国市场(2016年12期)2016-05-17