联合XBT和WOA13模型盐度信息的深水走航声速准确确定
2016-11-14 01:50黄辰虎陆秀平王克平申家双张博翟国君
海洋通报 2016年5期
黄辰虎,陆秀平,王克平,申家双,张博,翟国君
(海军海洋测绘研究所,天津 300061)
联合XBT和WOA13模型盐度信息的深水走航声速准确确定
黄辰虎,陆秀平,王克平,申家双,张博,翟国君
(海军海洋测绘研究所,天津300061)
在走航式海洋调查测量中通过投放XBT仪器来获取海水声速剖面,存在由于缺乏实测盐度信息导致的缺陷,其对深水海域的海水声速测量影响尤甚,并进一步影响到海洋水深测量精度。对国际WOA13模型进行了解析及适用性评估,提出了联合XBT和WOA13模型中盐度信息的深水走航声速准确确定方法。实例结果表明,该模型可有效弥补XBT无实测盐度支持及自身探测深度不足的固有缺陷。多个声剖站的全深度声速推算值与实测值间的互差仅有-0.2~0.35 m/s。
走航式水深测量;声速改正;声速剖面;温度;盐度;声速方程
海底地形资料是海洋环境信息的重要组成部分,由于海道测量重点面向航海安全,因此对水深测量的精度和要求更高。现阶段国内各相关涉海部门主要采用单波束测深仪和多波束测深系统等船载海洋水深测量设备,以走航式作业模式获取海底地形信息(欧阳永忠等,2012)。海洋测深基本原理是首先利用换能器发射并接收声波信号,在此过程中假定声波在海水中以一定速度(如1 500 m/s)沿直线传播获得原始水深;接着依据实地声速剖面进行声速改正以形成真实的瞬时水深;最后经姿态、潮汐等改正并融合平面位置得到成果水深(赵建虎,2007;黄辰虎等,2014)。显然,由于多波束测深系统呈扇面发射和接收声波信号的特殊性(周丰年等,2011),还需进行异于单波束测深的声线弯曲追踪归算(郑彤,2009)。由于声速剖面对海底地形探测特别是多波束测深的重要,在外业时应设法获取实地精确的声速剖面,以从源头上对多波束测深进行质量控制,否则不恰当的声速剖面将导致海底地形呈“凹凸”状系统性偏差,严重时将导致成果作废。因此声速剖面是否精确对海道测量尤其重要(李家彪,1999)。此外海水声速剖面也是水下声学定位、声场计算、水声设备使用等研究领域一项很重要的基本物理量(聂志喜,2015;张伟涛等,2013)。一般而言,海洋测量的航行计划线可设计为区域测线网状和连续走航式单测线两种形式,后者可随机、随地开展,是探测海洋环境信息的一种重要补充方式(黄辰虎等,2013)。国际上较多国家开展了综合性海洋调查测量活动,在全球海域范围内获取了测线呈辐射状且相互交织的包括地形、重磁以及温盐密等多种要素在内的海洋环境信息,其中部分数据可公开下载,因而是弥补海洋环境资料空白的一项重要手段。对水深测量而言,由于连续走航式作业具有不间断航行这一鲜明特点,应考虑如何在船艇走航过程中快速有效地获取航经区域的实地声速剖面,进而实施水深测量所必需的声速改正及声线追踪、归算,才能得到可靠的海底地形测量成果(赵建虎,2008)。
连续走航式海洋测量作业一般通过投放XBT(抛弃式温深仪)、XCTD(抛弃式温盐深仪)、MVP300(走航式海洋剖面测量系统)等仪器来获取投放站位的温度、盐度、深度(压力)等数据(张宝华等,2013),进而通过声速经验模型计算投放站位的声速剖面(侍茂崇等,2007;刘伯胜等,2013)。由于XBT(约900元/枚)较XCTD(约6 000元/枚)、MVP300(约500万/套)等获取声速剖面要简单、快捷,且性价比较高,在走航式海洋测量作业中得到了大量应用,但该仪器仅能采集深度、温度而不能采集盐度,在实用中一般假定盐度剖面为常量值如35.0(或其他值) (赵辰冰等,2013)。这种假设对于海洋调查涉及的声速跃层的判断和确定是足够的,但对于海洋测绘涉及的通过水深测量方式来获取高精度的海底地形来说,显然是不满足要求的。尽管海水的盐度值较稳定,但使用盐度常量值会给声速剖面计算带来一项潜在的系统性偏差,特别在盐度剖面较特殊的海域,该系统性偏差的影响将更显著。此外XBT探测深度一般在800 m范围以内,对于该深度范围以外的声速剖面,通过将温度、盐度均假定为常量值来得到。显然上述两个因素会直接降低XBT采集数据计算全深度声速剖面的精度,进而影响到海底地形测量的精度。
为弥补通过投放XBT来获取海水声速剖面存在的由于缺乏实测盐度信息支持而导致的固有缺陷,本文拟提出联合XBT和WOA13模型中的盐度信息来准确确定走航式水深测量中深水海域声速剖面的方法,同时采用多个实测声剖站的数据与相应的推算值进行多方面对比,以检验该方法的可行性、可靠性及实际应用价值。
1 全球WOA13温盐模型解析及适用性评估
1.1海水声速经验模型的选定
我国国家标准海洋调查规范、UNESCO(联合国教科文组织)、NOAA(美国海洋与大气局)均推荐采用Chen-Millero方程计算声速(C-T Chen,1977),具体如式(1-5)所示。

Chen-Millero声速模型系数见表1。
式(1)适用范围为0≤t≤40℃,5≤S≤40,0≤p≤1 000 bar,其中t为温度,单位为℃;S为盐度,单位为ppt;p为压力,单位为bar。
在计算海水声速剖面时本文选用式(1)。若式(1)超出适用范围,还可使用Chen-Millero-Li方程(Frank,1994),其适用范围为0≤t≤40℃,5≤S≤40,0≤p≤1 000 bar。
1.2WOA13温盐模型解析及适用性评估
World Ocean Atlas(WOA)即世界海洋图集,由美国国家海洋数据中心发布。该数据集通过对数十年在全球布设的Argo浮标以及大量投放的XBT、CTD、XCTD、SVP等多种仪器采集的实测数据加工而得,其成果包括全球海域范围内经处理后的一系列海洋水文要素数据集,WOA13是其最新版本,其中温、盐度模型分为年度、季节、月份等3种类型,空间分辨率为0.25°×0.25°。WOA13模型的主要目的是供海洋学家进行大尺度温盐场垂直结构分析应用。

表1 Chen-Millero声速计算模型的系数
对于海洋测绘而言,考核WOA13模型能否在深水区域水深测量使用且效果如何,从投入与产出来比较,显然是一项有较大实用价值的工作。为满足海洋测绘中走航式水深测量声速计算及改正的工程化应用需求,从WOA13模型中选定了包含12个月份的温、盐剖面数据集,经解析后得到各月份的温、盐站点位置,其中1月份有效的温、盐站点分布如图1所示。
再将1-12月共12个月份的WOA13温盐模型有效站点位置展示,具体如图2所示。
由图2知,从年尺度来看,全球WOA13温盐场模型的有效站位分布基本均匀,但在日本海、澳大利亚以及美国海域分布较密集。同时还可清晰看出多条大洋航渡式测线的航迹分布图。

图1 1月份的WOA13温盐场模型有效站点

图2 1-12月份的WOA13温盐场模型有效站点
为从WOA13温盐场模型提取有效点位的温、盐剖面数据,编制了模型解析软件。用户输入任意位置及待查询的月份,若该站位存在温、盐有效值,则可即刻显示全深度的温、盐度剖面,软件操作结果如图3、4所示。

图3 WOA13温盐场模型中温度剖面的解析

图4 WOA13温盐场模型中盐度剖面的解析
2012年度某个综合性海洋调查测量作业航次共投放了多个XBT仪器,以用于采集特定站位的温度、深度数据,其中第“××号XBT”站位温度剖面数据共760组,深度至760 m,水层间隔为1.0 m。
根据该站位的投放位置,从WOA13析取得到同位置处的模型温度剖面,深度至450 m,将其内插为水层间隔为1.0 m的温度剖面数据,共450组。以此计算实测值和模型值二者间的互差,结果如图5所示,图中蓝色曲线表示温度剖面的实测值,红色曲线表示温度剖面的模型值,绿色曲线表示二者的互差值。

图5 第“××号XBT”站位处的温度剖面实测值与模型值对比
从图5反映出,实测的温度剖面和模型的温度剖面二者高度相似,对二者温度剖面的互差值作统计,温度值互差在±0.5℃之间的数据占75.8%。
另外在该航次作业过程中,还穿插着投放了少量的XCTD仪器,这样为进一步检验WOA13模型盐度剖面数据的适用性也提供了基本条件。随机对其中编号为第“××CTD08.edf”的XCTD站位数据进行分析。该站位共采集到8 300组水层的温度、盐度数据,水层间隔为0.1~0.3 m不等,深度至1 090.0 m。采集的温度、盐度、电导率、声速等部分实测数据见表2所示。

表2 第“××CTD08.edf”站位处温度、盐度等实际观测值
从表2中的盐度剖面值可知,深度从0.0~1.9 m时,盐度值从22.89 ppt增大至34.06 ppt,显然这与实际情况不符,其主要原因是电导率测量值不准确导致。在具体处理时应预先剔除这些错误数据。
进一步从WOA13模型中析取表2中第“×× CTD08.edf”位置处盐度剖面,结果见图6所示。
比较图5、6中二者盐度剖面的数据,结果如图7所示,图中蓝色表示盐度剖面的实测值,红色表示盐度剖面的模型值。

图6 第“××CTD08.edf”站位处WOA13模型的盐度剖面值

图7 第“××CTD08.edf”站位处的盐度剖面实测值与模型值对比
由图7反映出,盐度剖面的实测值和模型值高度相似,进一步计算两种盐度剖面的互差并作统计,互差值在±0.1 ppt之间的数据占79.2%。若将表1中0.0~1.9 m深度区间的错误盐度值剔除的话,则二者盐度剖面的相似性将更强。
根据上述分析结果可知,对于所选站位来讲,全球WOA13温盐场模型温度、盐度剖面精度较高,有较强的适用性和可用性。
2 联合XBT和WOA13盐度信息准确确定深水走航声速方法
由于XBT仪器的特殊性,其探测数据仅包括深度、温度剖面,而无盐度剖面,若应用(1)计算声速剖面,则其中的S只能简单假定为常量,这样得到的声速值v必然存在1个系统性偏差,在盐度剖面变化剧烈的海域,该系统性偏差势必将更显著。无论是利用XBT、CTD或是XCTD的探测数据计算声速剖面时,都需对深度、温度(盐度)剖面作预处理及质量检查,以剔除观测粗差,因此可认为这时的深、温(盐)信息是准确的。就本文而言,主要讨论两个方面,一是XBT无实测盐度支持时对声速的影响以及如何解决;二是XBT探测深度范围以外,完全采用WOA13模型计算特定深度的声速剖面是否可行。
根据公式(1),推导得到声速对温度、盐度、压力等三者的偏导数,具体如下:

经计算,海水温度每变化1℃,声速变化约为原来的0.35%;盐度每增加1‰,声速约增加1.14 m/s;深度每增加100 m,声速约增加1.75 m/s,海水温度变化对声速的影响最大(刘雁春等,2006)。换言之,温、盐变化对声速影响不在同一个数量级,因此保证了本文提出的采用WOA13模型盐度信息来计算XBT探测深度以内声速剖面的方法具备初步可行性。
为考核WOA13模型能否提高XBT声速剖面的精度,以XCTD探测数据为例进行说明。首先这里以XCTD采集的温、盐、深计算的原始声速剖面为标准值,记为A;将其中盐度替换为WOA13模型盐度剖面后计算的声速剖面记为B;假定盐度剖面为常数值(35.0)后计算的声速剖面记为C;单独从WOA13模型计算的声速剖面记为D。进而比较A与B、C、D声速剖面三者间的互差,各970组,深度间隔为1 m,结果分别如图8-10所示。
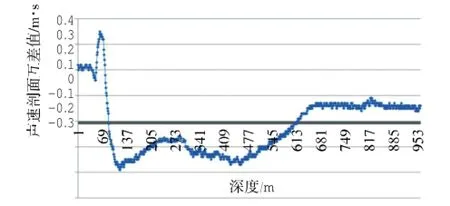
图8 A与B声速剖面互差(B的盐度剖面从WOA13析取)

图9 A与C声速剖面互差(C的盐度剖面假定为35.0)

图10 A与D声速剖面互差(D的温、盐剖面均从WOA13析取)
为更直观表达A与B、C、D三者间互差的综合对比情况,进一步作图11,其中3个曲线由上至下分别表示A与B、A与C、A与D间的互差值。

图11 A与B、C、D三者间互差综合对比
从图8-11知,实测声速剖面A与基于WOA13模型盐度值得到的声速剖面B,二者互差的范围在-0.2~0.35 m/s;而实测声速剖面A与人为假定盐度值为35.0后得到的声速剖面C,二者互差的范围在-1.15~0.18 m/s。显然,前者较后者要高一个量级。至于实际声速剖面A与单独从WOA13模型得到的声速剖面D,二者互差范围在-12.5~0.5 m/s。
对实测声速剖面与3种推算的声速剖面间的互差作统计分析,相关结果如表3所示。

表3 实测声速剖面与3种推算声速剖面间的互差统计(m·s-1)
由表3知,B仅存在随机误差,而C、D还存在系统性误差,特别是D的系统性误差更显著。通过几个指标的比较,在B、C、D 3个推算声速剖面中,B的精度明显优于C、D,即更接近于A。
对于XBT探测深度以下的水层,这时均无温度和盐度信息,其位置处的声速剖面可完全利用WOA13模型近似得到,其结果如图12所示。其中1~970 m内的声速剖面互差即图8的相关数值,971~1 501 m内的声速剖面互差采用类似图10方法得到。这也就是本文提出的联合XBT和WOA13盐度信息确定深水走航声速的一个基本应用。

图12 A与B、D组合后的声速剖面间的互差
由图12知,对于971~1 501 m深度范围,实际声速剖面A与完全从WOA13模型得到的声速剖面二者间的互差(971~1 501 m)明显减小,趋于0.22 m/s。这也是由于随着深度的增加,声速主要决定于压力,因而趋于稳定的原因。经计算,图12中的声速剖面互差的总体均方差为0.243 m/s。因此对于探测深度以外的声速值,可以用WOA13模型值来近似代替。
为进一步考核WOA13模型能否提高XBT声速剖面精度,这里以CTD探测数据为例说明,数据共1 500组,深度间隔为1 m。这里仍以CTD采集温、盐、深计算的原始声速剖面为标准值,记为A1;将其中盐度替换为WOA13模型盐度剖面后计算的声速剖面记为B1;假定盐度剖面为常数值(35.0)后计算的声速剖面记为C1;单独从WOA13模型计算的声速剖面记为D1。参照图11方法,对A1与B1、C1、D1三者间的互差作综合对比,如图13所示。

图13 A1与B1、C1、D1三者间互差综合对比
从图13知,实测声速剖面A1与基于WOA13模型盐度值得到的声速剖面B1,二者互差为-0.18~0.34 m/s。而实测声速剖面A1与人为假定盐度值为35.0后得到的声速剖面C1,二者互差在1.41~2.29 m/s。显然,前者较后者要高一个量级。至于实际声速剖面A1与单独从WOA13模型得到的声速剖面D1,二者互差在-12.1~0.6 m/s。
同时可知,随着探测深度的增加,A1与D1间的互差逐步稳定于2 m/s,这也进一步表明,在XBT探测深度范围(800 m)以外,使用WOA13模型计算相应深度处的声速剖面是可行的。
对实测声速剖面与3种推算声速剖面间的互差作统计分析,相关结果如表4所示。
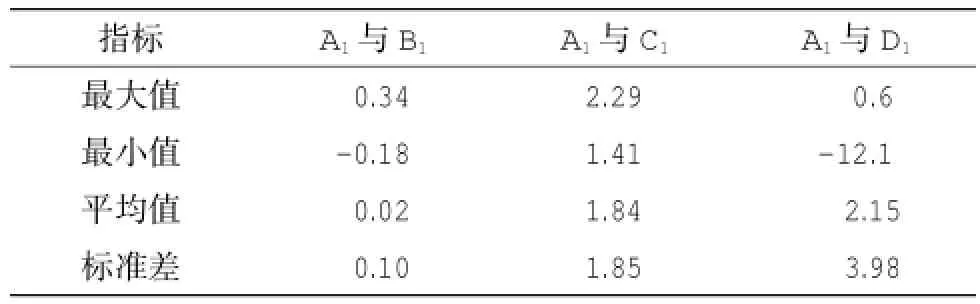
表4 实测声速剖面与3种推算声速剖面间的互差统计(m·s-1)
由表4知,B1仅存在随机误差,而C1、D1还存在系统性误差,特别是D1的系统性误差更显著。通过几个指标的比较,在B1、C1、D13个推算声速剖面中,B1的精度明显优于C1、D1,即更接近于A1。
综合表3、4知,WOA13模型可有效弥补XBT探测深度范围内无实测盐度支持的缺陷,同时对于探测深度范围以外内的深水声速剖面,使用WOA13模型提供的温、盐信息也是可行且可靠的。
3 结论与建议
尽管XBT仪器采集的数据仅包含海水的深度和温度信息,但由于其温度测量精度较高,顾及到海水盐度剖面规律性较强且较稳定等因素,在此基础上利用国际WOA13模型提供的盐度剖面,就可提高依据XBT探测数据计算实地海水声速剖面的精度,多个实际算例表明推算的声速剖面与实测值的互差仅有-0.2~0.35 m/s。
当然,由于XBT自身探测要素较少,在连续走航式的海洋测量作业过程中,还应穿插着进行XCTD、MVP300等温盐深仪器的配套使用,在多方面检验WOA13模型温、盐剖面精度的同时,对XBT采集的数据施以质量控制,这样才能确保获取的实地声速剖面的精度,进而提高海底地形测量的精度。可预见的是,在现有技术条件下,若将XBT观测数据与WOA13模型组合使用可显著降低外业工作的成本,同时提高海洋测量作业的效率。
需说明的是,本文仅是对国际WOA13模型进行了部分验证,要将其应用到实际海洋调查测量活动中还需作更多的验证和模型自身的改进工作,这也是作者下一步的工作方向。
致谢:感谢美国国家海洋数据中心提供的国际WOA13数值模型,感谢黄谟涛高工、欧阳永忠高工为文章修改提出的宝贵意见。
C Chen,Millero F J,1977.Speed of sound in seawater at high pressures. J.Acoust.Soc.AM.62(5):1 129-1 135.
Frank J Millero,Xu Li,1994."Comments on'On equations for the speed of sound in seawater',"J Acoust Soc Am,95(1):2 757-2 759.
国家海洋局,1992.GB 12763.7-1991.海洋调查规范第7部分:海洋调查资料处理.北京:中国标准出版社.
国家海洋局,2008.GB 12763.10-2007.海洋调查规范第10部分:海底地形地貌调查.北京:中国标准出版社.
国家海洋局,2008.GB 12763.2-2007.海洋调查规范第2部分:海洋水文观测.北京:中国标准出版社.
国家海洋局,2008.GB 12763.7-2007.海洋调查规范第7部分:海洋调查资料处理.北京:中国标准出版社.
黄辰虎,陆秀平,欧阳永忠,等,2013.远海航渡式水深测量水位改正方法研究.海洋测绘,33(5):10-14.
黄辰虎,陆秀平,欧阳永忠,等,2014.多波束水深测量误差源分析与成果质量评定.海洋测绘,34(2):1-6.
李家彪,1999.多波束勘测原理技术与方法.北京:海洋出版社:101-125.
刘伯胜,雷家煜,2013.水声学原理.武汉:哈尔滨工程大学出版社:
刘雁春,肖付民,暴景阳,等,2006.海道测量学概论.北京:测绘出版社:73-77.
聂志喜,王振杰,李圣雪,2015.水下声学定位中声速改正方法的比较.海洋通报,34(4):423-427,23-31.
欧阳永忠,陆秀平,米阳,等,2012.通用走航式海洋测量作业平台的设计与实现.海洋测绘,32(6):1-6.
侍茂崇,高郭平,鲍献文,2007.海洋调查方法.青岛:中国海洋大学出版社:47-54.
张宝华,赵梅,2013.海水声速测量方法及其应用.声学技术,32(1):24-28.
张伟涛,张韧,王辉瓒,等,2013.基于Argo观测资料的南海北部海域声速场时空特征分析.海洋通报,32(3):275-280.
赵辰冰,张锁平,2013.利用XBT数据分析声速剖面的研究.声学技术,32(5):151-153.
赵建虎,2007.现代海洋测绘.武汉:武汉大学出版社:90-97.
赵建虎,刘经南,2008.多波束测深及图像数据处理.武汉:武汉大学出版社:101-110.
郑彤,周亦军,边少锋,2009.多波束测深数据处理及成图.海洋通报,28(6):112-117.
周丰年,赵建虎,周才扬,2001.多波束测深系统最优声速公式的确定.台湾海峡,20(4):411-420.
(本文编辑:袁泽轶)
A method of exactly determining the sound velocity in deep water based on salt information from WOA13 model and XBT data
HUANG Chen-hu,LU Xiu-ping,WANG Ke-ping,SHEN Jia-shuang,ZHANG Bo,ZHAI Guo-jun
(Naval Institute of Hydrographic Surveying and Charting,Tianjin 300061,China)
There is an inherent low precision of sound velocity by casting XBT apparatus,which will reduce the precision of sailing bathymetric survey in deep water due to the lack of practical salt.The global numerical model of WOA13 is analyzed and validated.How to improve the precision of sound velocity profile of XBT in deep water based on WOA13 is researched in this article at first.It is obvious that WOA13 model could improve the precision of sound velocity profile of XBT by providing the salt profile and it could solve the deficiency of detecting depths.Some details are analyzed.The mutual difference between the reckon profile and practicality profile is only-0.2~0.35 m/s.
sailing bathymetric survey;sound velocity correction;sound velocity profile;temperature;salinity;sound velocity equation
P716+.41
A
1001-6932(2016)05-0554-08
10.11840/j.issn.1001-6392.2016.05.009
2015-06-30;
2015-09-29
国家自然科学基金(41474012;41174062;41374018);国家重大科学仪器设备开发专项(2011YQ12004503)。
黄辰虎(1979-),男,工程师,主要从事海底地形测量数据处理以及海洋潮汐、海水声速的分析及预报研究。电子邮箱:hchhch-1997@163.com。
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
城市道桥与防洪(2019年5期)2019-06-26
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
北京航空航天大学学报(2016年6期)2016-11-16
船舶标准化工程师(2015年5期)2015-12-03
中国新技术新产品(2015年3期)2015-07-19
航空学报(2015年4期)2015-05-07
航空学报(2015年4期)2015-05-07
中国洗涤用品工业(2015年5期)2015-02-28
河北渔业(2014年3期)2014-07-08