
基于多属性决策的相控阵雷达截获任务规划算法
2016-11-16 09:19刘昌云郭相科
现代雷达 2016年10期
韦 刚,刘昌云,郭相科
(空军工程大学 防空反导学院,西安 710051)
基于多属性决策的相控阵雷达截获任务规划算法
韦 刚,刘昌云,郭相科
(空军工程大学 防空反导学院,西安 710051)
作战管理是弹道导弹防御的核心,而作战管理的首要任务是雷达任务规划,雷达任务规划是一个多属性决策问题。通过对影响雷达截获目标的关键因素分析,提出以任务相对截止时间、目标优先级、目标距离时间等因素为核心,采用多属性决策方法,建立雷达截获任务优先级模型,实现雷达截获任务规划算法。仿真结果表明:文中提出的算法在雷达截获任务安排上合理、有效。
多属性决策;弹道导弹;雷达截获;任务规划
0 引 言
弹道导弹防御对传感器跟踪目标的速度、精度以及各种武器系统、传感器和作战人员的协调性提出了严峻的挑战,决策周期必须缩短到几分钟,要求从探测预警到指挥决策再到武器拦截,形成一体化的、智能化的决策过程。因而通过精确的早期目标引导功能,提前安排雷达的截获跟踪任务,使雷达在合适的时间和空间等待截获目标,是解决相控阵雷达的时间资源、能量资源有限的良好方法。相控阵雷达由于其具有波束扫描的灵活性、时间资源分配的可控性和多任务属性等特点,在目标远程预警、跟踪、识别等领域得到了广泛的应用。相控阵雷达的主要任务包括搜索、跟踪、识别,任务具有动态性、实时性以及非抢占性。因而,从实时系统的角度上分析,相控阵雷达的任务调度本质上是属于单处理器多任务的实时调度系统。相控阵雷达资源调度的主要算法有:静态优先级的速率单调调度算法、时限单调调度算法、动态优先级的最早截止期优先(EDF)调度算法、最小裕度优先调度算法等[1],其中,EDF调度算法最具有代表性。文献[2-3]中利用功率管控及无缝搜索技术,在资源平衡性、任务完成率等方面都取得了良好的效果。上述算法都是针对雷达内部的资源调度,属于雷达资源调度范畴。在作战管理指控(BM/C2)系统中,雷达是作为一个装备节点来进行任务的安排,属于雷达外部的任务规划范畴,上述算法就很难适应。本文基于弹道目标具有弹道可预测性的特点,提出了多属性决策的雷达截获任务规划算法。
1 雷达截获任务模型

PXti=PA+PE
(1)
式中:PA为弹道椭圆参数精确,但弹道平面法向偏离真实方向所引起的误差;PE为弹道平面法向精确,但椭圆参数不准确引起的误差。
通过滤波算法可以对预测点{ti,Xti,Yti,Zti}进行进一步的平滑滤波[9-10]。
(2)


(3)

雷达具有多任务属性,即在时间约束关系下,执行其搜索、截获、跟踪、识别等任务,其主要时间资源用于目标跟踪和目标的识别等,剩余的时间资源用于截获搜索任务,则雷达可用的搜索时间为
ΔT=T-Tt-Tr
(4)
式中:T为雷达时间调度周期;Tt为用于跟踪的时间资源;Tr为用于目标识别的时间资源。
2 雷达截获任务优先级模型
雷达截获任务规划的复杂性在于雷达的跟踪与识别任务具有时效性,并且每个目标跟踪参数的不同、目标识别的时机等都会引起雷达资源占用率的变化,尤其是一旦安排跟踪任务、识别任务,就必须执行完毕,否则整个任务无效[11]。对于弹道目标的截获搜索任务与空气动力学目标的截获有所不同:弹道目标的截获任务属于提前等待截获的任务,只有当某个截获任务执行完毕后,才可安排下一个截获搜索任务,因而属于实时系统非抢占式多任务调度的问题。
对于目标截获搜索任务的安排,一般采用优先级驱动策略,即在任务规划分析的各个时刻总是选取优先级最高的任务来执行。截获任务是一种多属性的任务决策模式,需要综合目标信息的多种属性来判断截获任务的最终优先级。
2.1 截获任务的属性参数
通过对雷达截获任务集合的深入分析,可以确定雷达截获任务时的属性参数主要包括:
(2)目标优先级:PRIi。PRIi按从小到大的顺序表明指示目标的优先级,PRIi越小,表明其优先级越高。
由于di、PRIi、Tfi的计量单位、范围都不一样,不可能直接用简单的线性加权等方法来计算截获任务的优先级,必须对这三个参数进行计量单位、参数范围的归一化处理。
2.2 优先级模型
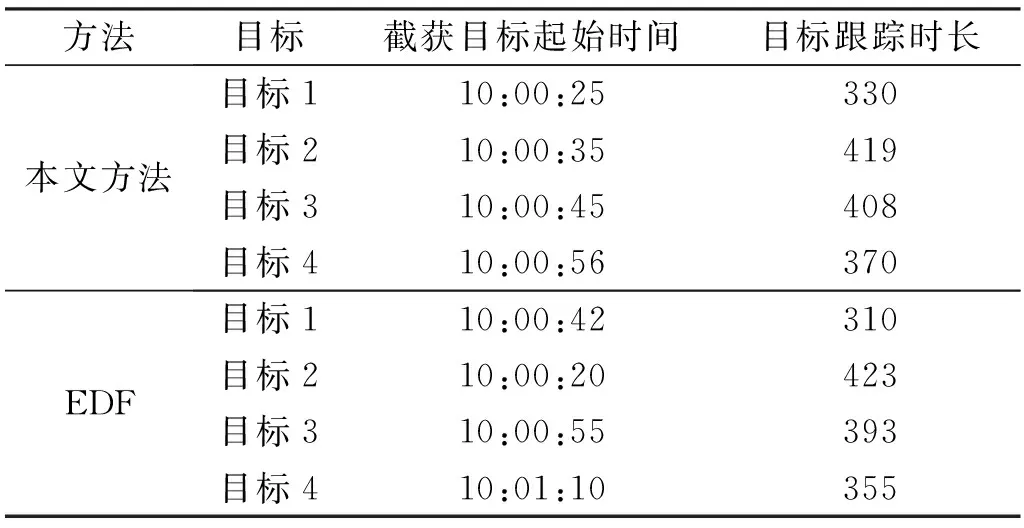
根据2.1节分析,截获任务的优先级与di、PRIi和Tfi密切相关。将任务集合中所有任务按照di、PRIi和Tfi的优先级进行排序,得到相目标对截止时间序列:d1,d2,…,dN(满足d1 图1 截获任务的优先级表设计 截获任务集合Job中的每一个截获任务Jobi的三个属性参数di、PRIi和Tfi必然是上述三种排列取值中的一个,记为: 由于mi、ni、pi都是归一化后的同一性参数,因而,根据线性加权方法,可以确定第i个截获任务的优先级为 Pi=α·mi+β·ni+γ·pi (5) 式中:α、β、γ(α+β+γ=1)为加权系数,可以根据属性参数的重要程度事先确定。 2.3 加权系数的选取 式(5)中的三个加权系数α、β、γ也将影响优先级Pi的确定,加权系数主要采用以下三种策略: (1)平均策略,即α=β=γ=1/3,即平均三项属性的综合优先级。 (2)相对截止时间优先级策略,即α<β且α<γ,表示目标进入雷达截获范围的时间越小,其优先级越高。 (3)目标优先级策略,即γ<β且γ<α,表示目标越重要,其优先级越高。 3.1 截获任务规划的基本思想 由于雷达的时间资源有限,因而在雷达截获任务规划的过程中,还要考虑雷达可进行该任务的时间约束关系。在雷达截获任务规划周期内,先评估雷达用于跟踪、目标识别等任务所占的时间资源,如有剩余时间资源,则从当前时刻到达的所有截获任务中根据最终确定的优先级大小添加到执行任务队列中,并同步从雷达时间资源中减去截获任务所占的时间资源,并相应估计该任务执行完毕后的时间,如时间满足下一个任务的执行,则继续安排目标截获任务。对那些由于雷达时间资源不够而无法安排的任务,推迟其到有剩余雷达时间资源的时刻。在每个工作周期内,都要把超出任务截止期的任务删除,并实时计算每个工作周期的时间资源占用情况。 3.2 截获任务规划算法流程 3.2.1 执行条件 弹道预测误差的大小将影响雷达截获目标时的截获屏大小,预测误差大时,雷达截获屏设计的就大,而截获屏增大,将占用雷达较多的时间资源,从而严重影响对其他目标的截获任务规划。因而,完成雷达截获任务优先级决策的基础上,对截获任务规划算法的执行有一个限制条件:当预测误差大于雷达截获允许的最大误差时,不执行该目标的截获任务规划流程;反之,则启动该目标的截获任务规划流程。 3.2.2 算法流程 对于N个截获任务{Jobi},i=1,2,…,N,根据每个任务到达时间的先后生成一个任务请求链表,同时初始化精跟任务执行链表、粗跟任务执行链表和任务删除链表。 假设条件:假设雷达从收到目标指示信息到稳定跟踪所需的时间为A1,雷达截获任务提前等待时间A3。 初始条件:设当前时间为tp,剩余资源ηcur=1-ηs,当前雷达已精跟的目标数为Nj,粗跟目标数为Nc,雷达的精跟目标容量为Mj,粗跟目标容量为Mc。 步骤1:根据式(4)分别计算上述N个截获任务集合中所有任务的最终优先级,并将这N个截获任务按照最终优先级由大到小重新排列PRIi(i=1,2,…,N);令k=1。 步骤3:如果Nj 步骤4:k←k+1,如果k 步骤5:如果Nj=Mj和Nc=Mc,算法结束;否则分析判断删除任务链表中剩余的截获任务,重新令i=1,此时雷达当前时间为tp。 (1) 取删除任务链表中的截获任务。如果为空,算法结束。 (2) 如果Nc=Mc,算法结束。 4.1 仿真条件 假设某雷达在10时0分0秒时同时收到四枚弹道目标的预警指示信息,每枚弹道目标的预警指示信息如表1所示。 表1 某雷达收到的预警指示信息 仿真的目标飞行轨迹以及雷达的截获空间和时间区如图2所示。 表2 目标在雷达作用范围内的飞行空间-时间区间 图2 仿真目标轨迹及雷达截获空间-时间区示意图 加权系数设为:α=β=γ=1/3,即采用平均策略。 4.2 仿真结果 利用本文方法与EDF决策的仿真结果进行比较,其结果如表3所示。 表3 仿真结果比较 s 方法目标截获目标起始时间目标跟踪时长本文方法目标110:00:25330目标210:00:35419目标310:00:45408目标410:00:56370EDF目标110:00:42310目标210:00:20423目标310:00:55393目标410:01:10355 从表3分析可知:针对四批截获目标,EDF决策方法总的目标跟踪时长为1 471 s,而本文方法总的目标跟踪时长为1 527 s,跟踪目标时长得到了提高。并且EDF决策方法对目标2的跟踪时长为423 s,主要原因在于EDF决策方法采用了先到先截获的原则,而结合表1和表2中的参数分析可知目标1优先级高、在雷达截获区内飞行时间短,应具有优先的截获权。采用本文方法把目标1优先截获,提高了对目标1的跟踪时长,相应的目标2的跟踪时长减少,但总的跟踪时长得到了提高。 在弹道导弹防御作战管理中,雷达是作为一个装备来进行任务的安排。本文提出的以任务相对截止时间、目标优先级、目标距离时间等因素为核心,建立多属性决策的雷达截获任务规划算法。仿真结果表明:该算法在雷达截获任务安排上合理、有效,有效提高了对目标的跟踪时长。 [1] CORRET F,DELACROIX J,KAISER C,et al.Scheduling in real-time systems[M].[S.l.]:John Wiley & Sons Ltd,2002. [2] 欧 健,赵 锋,杨建华,等.机载雷达功率管理建模与仿真[J].现代防御技术,2014,42(5):145-152. OU Jian,ZHAO Feng,YANG Jianhua,et al.Modeling and simulation of power management on airborne radar[J].Modern Defence Technology,2014,42(5):145-152. [3] 孙 涛,山秀明,陈 鲸.基于空间目标特性的无缝搜索技术研究[J].宇航学报,2013,34(8):1100-1105. SUN Tao,SHAN Xiuming,CHEN Jing.Research of seamless search technique based on space object characters[J].Journal of Astronautics,2013,34(8):1100-1105. [4] 赵 峰,毕 莉,肖顺平.弹道导弹防御预警系统弹道预测误差分析[J].弹道学报,2008,20(4):49-52. ZHAO Feng,BI Li,XIAO Shunping.Analysis on trajectory prediction error of warning system in ballistic missile defense[J].Journal of Ballistics,2008,20(4):49-52. [5] 周 颖,王雪松,冯德军,等.基于弹道预报的相控阵雷达监视空域研究[J].电子与信息学报,2006,28(7):1209-1214. ZHOU Ying,WANG Xuesong,FENG Dejun,et al.Surveillance volume of phased array radar based on trajectory prediction[J].Journal of Electronics & Information Technology,2006,28(7):1209-1214. [6] HARLIN W J,CICCI D A.Ballistic missile trajectory prediction using a state transition matrix[J].Applied Mathematics and Computation,2007,188(2):1932-1847. [7] 张 晶,狄邦达.惯性弹体运动建模[J].火力与指挥控制,2010,35(1):161-163. ZHANG Jing,DI Bangda.Predictive modeling of inetial projectile-body movement[J].Fire Control and Command Control,2010,35(1):161-163. [8] 赵 峰,毕 莉,肖顺平.弹道导弹防御预警系统弹道预测误差分析[J].弹道学报,2008,20(4):49-52. ZHAO Feng,BI Li,XIAO Shunping.Analysis on trajectory prediction error of warning system in ballistic missile defense[J].Journal of Ballistics,2008,20(4):49-52. [9] SIOURIS G M,CHEN G R,WANG J R.Tracking an incoming ballistic missile using an extended Kalman filter[J].IEEE Transactions on Aerospace and Electronic Systems,1997,33(1):232-239. [10] ZHANG J G,JI H B.Modified iterated extended Kalman filter based multi-observer fusion tracking for IRST[J].System Engineering and Electronics,2010,32(3):504-507. [11] 赵 峰,毕 莉,杨建华,等.反导跟踪雷达最优搜索时序研究[J].现代雷达,2009,31(9):28-31. ZHAO Feng,BI Li,YANG Jianhua,et al.A study on optimal search order of anti-missile tracking radars[J].Modern Radar,2009,31(9):28-31. 韦 刚 男,1978年生,讲师。研究方向为指挥控制和计算机仿真。 刘昌云 男,1973年生,副教授。研究方向为雷达信号处理和目标跟踪。 Algorithms of Search Mission Planning in Phased Array Radar Based on Multi-attribute Decision WEI Gang,LIU Changyun,GUO Xiangke (Air and Missile Defense College of Air Force Engineering University,Xi′an 710051,China) The battle management is the key in ATBM,and the first job in battle management is the task planning of radar,which belongs to the multi-attribute decision.Based on the kernel factors,such as the deadline of task,PRI of target,interval time of target,etc,the PRI model of radar search task using multi-attribute decision is presented,then the algorithms of radar search task planning is achieved.The results of simulation demonstrate that the algorithms are reasonable and effective. multi-attribute decision;tactical ballistic missile;radar search;mission planning ��处理· 10.16592/j.cnki.1004-7859.2016.10.011 国家自然科学基金资助项目(60872139) 韦刚 Email:weigang_AFEU@163.com 2016-07-22 2016-09-19 TN958.92 A 1004-7859(2016)10-0042-05
3 雷达截获任务规划算法


4 仿真


5 结束语
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09成都信息工程大学学报(2019年2期)2019-08-28电子制作(2019年15期)2019-08-27电子制作(2019年7期)2019-04-25第二课堂(课外活动版)(2019年12期)2019-02-10小学生学习指导(低年级)(2018年12期)2018-12-29成都信息工程大学学报(2018年1期)2018-05-31制导与引信(2016年3期)2016-03-20火控雷达技术(2016年3期)2016-02-06百科探秘·航空航天(2015年4期)2015-11-07
