
不确定离散系统的保性能扰动抑制方法
2016-12-08 08:03刘瑞娟段孝娟陈建成
厦门理工学院学报 2016年5期
刘瑞娟,翁 振,段孝娟,陈建成
(厦门理工学院应用数学学院,福建 厦门 361024)
不确定离散系统的保性能扰动抑制方法
刘瑞娟,翁 振,段孝娟,陈建成
(厦门理工学院应用数学学院,福建 厦门 361024)
基于等价输入干扰的思想,将离散系统的外界扰动及模型不确定性均视为系统的扰动,等价到系统的输入端,提出一种不确定离散系统的保性能扰动抑制方法.采用基于内模及状态反馈的结构进行扰动抑制设计,利用李亚普诺夫方法得到控制系统的稳定性条件.并引入保性能优化指标,对控制器增益进行优化设计.仿真结果显示,该方法能够获得良好的扰动抑制效果.
离散系统;不确定性;保性能控制;扰动抑制;等价输入干扰
在工业过程控制中,控制系统都不可避免地存在建模误差、参数摄动等不确定因素,并受到外界干扰的影响,如电力系统、机械系统及化工系统等.这些不确定性不仅使得系统的控制性能变差,产生稳态误差,而且还可能导致系统不稳定.因此,扰动抑制问题一直受到国内外学者的广泛关注[1].而当实现各种控制策略时,计算机处理的只能是离散的数字信号,也就是通过离散化的方法将连续系统转化成离散系统来处理.如果直接针对离散系统进行控制设计,更有利于分析和实现.
目前,离散系统的扰动抑制研究已取得了一定的成果.例如:滑模控制利用一个滑动面消除参数不确定性及外界扰动对系统的影响,知道扰动的上下界便可设计出渐近稳定的控制器[2];基于干扰观测器的方法主要利用对象的逆模型和低通滤波器来构造扰动观测器,从而对扰动进行实时估计[3];自抗扰控制则把系统的未建模动态和未知扰动作用归结为一种总扰动,再利用扩展状态观测器对这种扰动进行实时估计,进而反向补偿[4].
基于等价输入干扰(equivalent input disturbance,EID)的方法主要思想在于根据扰动对系统输出的影响效果,定义一个与总扰动等价的输入端干扰,再通过控制器的设计实现对输入端干扰的反向补偿[5]380.基于等价输入干扰的方法首先对线性系统进行了扰动抑制设计及电机装置实验[5]380.文献[6-7]将该方法分别应用于不确定系统、状态时滞系统等,获得了良好的扰动抑制性能.等价输入干扰方法现已在汽车驾驶控制[8]、建筑物减震[9]和欠驱动机器人[5]380等方面实现了成功的应用.然而,这种方法对离散系统的扰动抑制问题尚未涉及.本文针对不确定离散线性系统,基于等价输入干扰的思想,采用内模及反馈控制进行系统的扰动抑制设计,并结合保性能优化控制方法,得到合适的控制器增益,使系统获得了良好的跟踪控制性能.
1 预备知识
本文考虑如下不确定离散线性系统:

(1)
其中:x(k)为状态变量;u(k)为控制输入;y(k)为输出信号;A,B,C为维数合适的系数矩阵.该对象的不确定为时变的,并具有一般形式:[ΔA(k)ΔB(k)]=ME(k)[N0N1].这里M、N0、N1为已知适当维数的常数矩阵,E(k)∈Rn×n为具有勒贝格可测元素的矩阵函数,满足
(2)
考虑到控制系统的一般性,对被控对象做如下假设:1)系统(1)是能观测的且是能控的;系统(2)在虚轴上是没有零点的.
首先利用等价输入干扰的思想,将不确定性及外界干扰一起等价到系统的输入端,再对该等价干扰进行抑制.
等价输入干扰的概念及存在性叙述见图1、图2.
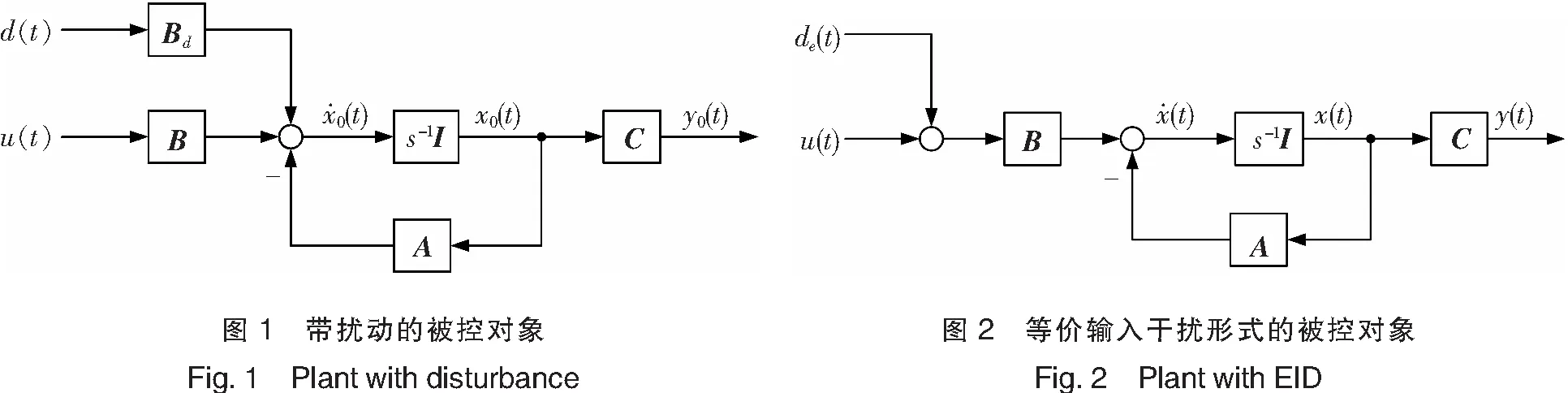
定义1[5]令控制输入u(t)为0.如果对于所有的t≥0,图1和图2中系统的输出恒相等,那么,扰动de(t)就叫作扰动信号d(t)的等价输入干扰.
根据稳定逆的概念[10],有如下引理1.
引理1[5]令Θ={pi(t)sin(ωit+φi)},i=0,1,…,n.其中:ωi(ωi≥0)和φi为常数;pi(t)是关于时间t的任意多项式.那么,若被控对象是能控的和能观测的,且在虚轴上没有零点,则在控制输入端必存在一个等价输入干扰de(t)∈Θ,并且其产生的输出也包含于集合Θ.
根据定义1和引理1,将对象(1)写为
(3)
为了更方便分析系统的稳定性,先给出引理2、引理3.
引理3[12]设f1(x)、f2(x)为定义在Rn上的二次型函数,若f2(x)≤0,∀x∈Rn-{0},则f1(x)<0的充要条件是:存在ε≥0,使得f1(x)-ε·f2(x)<0成立.
假设输出矩阵C的奇异值分解为:
(4)
这里S为半正定矩阵,U和V为酉矩阵.
2 基于内部模型的系统扰动抑制优化设计
内部模型是控制系统设计中一种常用的方法,其核心部分就是一个积分器,根据参考输入的不同,设计也需要做相应的改变.内部模型的主要作用就是用来精确跟踪参考输入,消除稳态误差,达到良好的控制效果.
本文的不确定离散线性系统结构如图3所示.所设计的系统包括被控对象、内部模型和状态反馈控制器3部分,其中内部模型为:
(5)
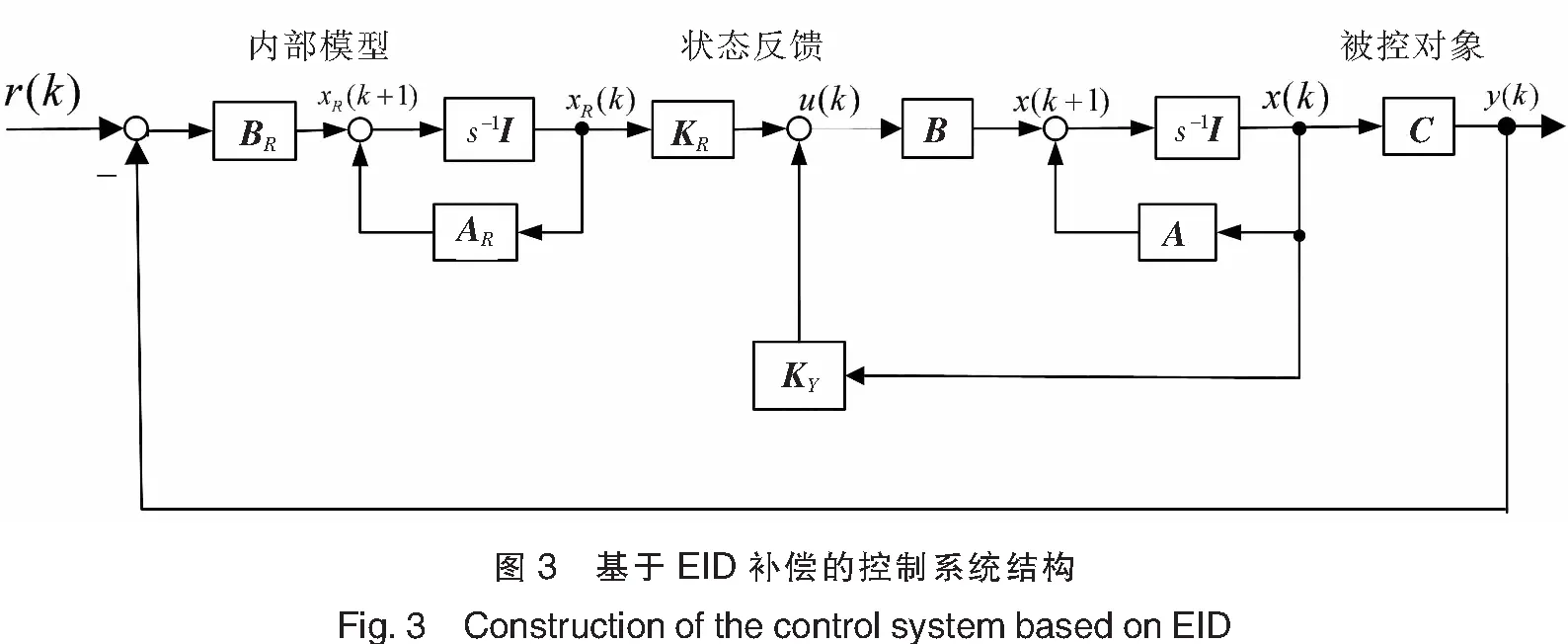
其主要作用是精确地追踪输入信号r(k).由此,对于精确已知的输入信号r(k),参数AR、BR就能容易确定.同时状态反馈控制律设计为:
(6)
由于外部信号不会影响到系统内部的稳定性,所以令外部输入为0,即
(7)
同时定义φ(k)=[xR(k)x(k)]T.由式(1)及式(6)可以得到:
(8)
结合(1)、式(7),内模(5)化为:
(9)
由式(8)和式(9)可得控制系统的状态空间表达式:

(10)


(11)

以下定理1给出了不确定离散线性系统的稳定性充分条件以及控制器参数.
定理1 离散系统(1)在控制律(6)作用下是渐近稳定的,若存在对称正定矩阵X1、X2以及合适维数的矩阵W1和W2,使得如下LMI可行
(12)

(13)
证明 选取合适的Lyapunov函数
(14)
(15)

(16)
(17)
对式(17)左乘右乘对角矩阵Π=diag{P1-1,P2-1,I,I}=diag{X1,X2,I,I},得
(18)

注意到式(18)不是LMI,为解此矩阵不等式,对相应系数进行以下替换:
KRX1=W1,KYX2=W2,
(19)
将式(19)代入式(18),即得式(12)LMI.
结合式(2)和式(11)得:ΓT(k)Γ(k)≤φT(k)ΨTΨφ(k).对式(16)应用引理2,取ε=1.由于系统稳定当且仅当V(k+1)<0,因此式(12)保证了不确定系统(8)渐近稳定.由式(19)可得控制器增益式(13).


(20)

由于矩阵不等式(20)不是线性的,而且不易转化为线性,因此,利用定理1求出一组可行解,再代入式(20)验证是否满足优化条件.若条件不满足则可将式(14)中的待定矩阵P1替换为αP1,通过调节其中的参数α来间接调节矩阵,直到式(20)负定为止.
3 数值仿真

(21)
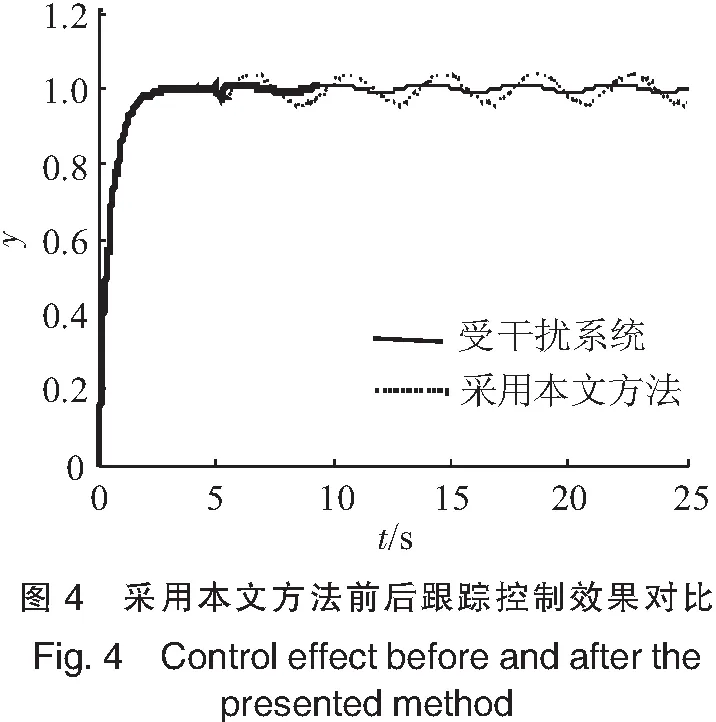
综上可知,定理1可以很好地处理不确定性离散系统的稳定性问题.但是,当系统被控对象受未知干扰影响时,则定理1的效果就显得不太理想.为了检验这个问题,在5s时将如下未知扰动加于系统(1)的输出端:
du(t)=0.1 tanht-0.5 tanh(0.5t)+0.8 sin(0.5πt) .
(22)
在不匹配扰动式(22)干扰的情况下,原受干扰系统和本文的控制系统的输出响应对比曲线见图4.在[5s,25s]区间,滑模控制系统输出的峰值为0.08,而应用本文方法后,峰值即降到了0.03以下.由图4可以看出,定理1的方法在处理系统的稳定性问题是可行的,同时也会受到系统干扰的影响.
4 结论
本文将基于等价输入干扰的思想应用于不确定离散系统,提出了一种基于内模的保性能扰动抑制方法.采用内模及状态反馈进行系统的扰动抑制设计,利用李亚普诺夫方法得到控制系统的稳定性条件及控制器增益,再应用保性能优化指标进行进一步的优化设计.通过数值算例仿真可以看出,所提出的方法具有较好的扰动抑制控制性能.
[1]周克敏,DOYLEJC,GLOVERK.鲁棒与最优控制[M].毛剑琴,钟宜生,林岩,译.北京:国防工业出版社,2002:1-155.
[2]XIAY,FUM,SHIP,etal.Robustslidingmodecontrolforuncertaindiscrete-timesystemswithtimedelay[J].IETControlTheoryandApplications,2010,4(4):613-624.
[3]YANGJ,CHENWH,LIS.Nonlineardisturbanceobserverbasedrobustcontrolforsystemswithmismatchingdisturbances/uncertainties[J].IETControlTheoryandApplications,2011,5(18):2 053-2 062.
[4]XIAY,SHIP,LIUGP,etal.Activedisturbancerejectioncontrolforuncertainmultivariablesystemswithtime-delay[J].IETControlTheory&Applications,2007,1(1):75-81.
[5]SHEJ,FANGM,OHYAMAY,etal.Improvingdisturbance-rejectionperformancebasedonanequivalent-input-disturbanceapproach[J].IEEETransactionsonIndustrialElectronics,2008,55(1):380-389.
[6]LIURJ,LIUGP,WUM,etal.Robustdisturbancerejectionbasedonequivalent-input-disturbanceapproach[J].IETControlTheory&Applications,2013,7(9):1 261-1 268.
[7]LIURJ,LIUGP,WUM,etal.Disturbancerejectionfortime-delaysystemsbasedontheequivalent-input-disturbanceapproach[J].JournaloftheFranklinInstitute,2014,351(6):3 364-3 377.
[8]纪志成,常军.基于等价输入干扰估计器的永磁同步电机无速度传感器控制水[J].仪器仪表学报,2009,30(10):2 139-3 143.
[9]SHEJ,ZHANGA,LAIX,etal.Globalstabilizationof2-DOFunderactuatedmechanicalsystems:anequivalent-input-disturbanceapproach[J].NonlinearDynamics,2012,69(1):495-509.
[10]HUNTLR,MEYERG,SUR.Non-causalinversesforlinearsystems[J].IEEETransactionsonAutomaticControl,1996,41(4):608-611.
[11]KHARGONEKPP,PETERSENIR,ZHOUK.Robuststabilizationofuncertainlinearsystems:quadraticstabilizabilityandH∞controltheory[J].IEEETransactionsonAutomaticControl,1990,35(3):356-361.
[12]YAKUBOVICHVA.S-procedureinnonlinearcontroltheory[J].VestnikLeningradUniversity,2010(1):62-77.
(责任编辑 李 宁 雨 松)
Guaranteed Cost Disturbance Rejection Methodfor Uncertain Discrete Systems
LIU Ruijuan,WENG Zhen,DUAN Xiaojuan,CHEN Jiancheng
(SchoolofAppliedMathematics,XiamenUniversityofTechnology,Xiamen361024,China)
Basedontheideaoftheequivalent-input-disturbance,boththeexternaldisturbancesandmodeluncertaintiesweretreatedasthewholedisturbanceimposedontheinputchannelofthediscretesystem.Thispaperpresentedadisturbancerejectionmethodforuncertaindiscretesystemsusingguaranteedcostcontrol.Thenthesystemwasconstructedusingtheinternalmodelandstatefeedbackfordisturbancerejection.ThestabilityconditionofthesystemwasobtainedbyusingtheLyapunovmethod.Thecontrollergainwasoptimizedbyintroducingtheguaranteedcostindex.Simulationresultsshowthatthismethodobtainsgooddisturbancerejectionperformance.
discretesystem;uncertainty;guaranteedcostcontrol;disturbancerejection;equivalent-input-disturbance
2016-05-23
2016-07-21
福建省自然科学基金项目(2016J05165,2013J01027);厦门理工学院高层次人才项目(YKJ14030R)[作者简介]刘瑞娟(1982-),女,讲师,博士,研究方向为鲁棒控制.E-mail:liuruijuan@xmut.edu.cn
TP13
A
1673-4432(2016)05-0019-06
猜你喜欢
数学物理学报(2022年4期)2022-08-22
新高考·高三数学(2022年3期)2022-04-28
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
成都信息工程大学学报(2021年6期)2021-02-12
数学物理学报(2019年4期)2019-10-10
电机与控制学报(2018年9期)2018-05-14
中文信息(2017年12期)2018-01-27
住宅科技(2015年11期)2015-12-08
中央民族大学学报(自然科学版)(2015年2期)2015-06-09
