下垂控制逆变器中并网功率控制策略
2016-12-12 06:16陈桂鹏何湘宁
电工技术学报 2016年22期
陶 勇 邓 焰 陈桂鹏 何湘宁
下垂控制逆变器中并网功率控制策略
陶 勇 邓 焰 陈桂鹏 何湘宁
(浙江大学电气工程学院 杭州 310027)
下垂控制策略广泛应用于交流微电网中,可以实现并网模式和孤岛模式的无缝切换以及不同逆变器之间的功率均流。然而,在目前的研究工作中,并网模式下的工作性能却很少被考虑到。实际上,并网模式下的功率控制会受到电网频率以及电网电压幅值波动的影响,并且传统下垂控制中无功功率控制本身就存在静态误差。因此提出了电网频率和电网电压幅值前馈控制来抑制电网波动对功率控制的影响,另外基于此提出公共耦合点电压幅值控制实现无功功率的无静差跟踪。基于提出的控制策略实现了下垂控制逆变器并网功率的精确稳定控制。
下垂控制 电网波动 并网功率控制 电网频率和电网电压幅值前馈控制 公共耦合点电压幅值控制
0 引言
通过将新能源发电与其他微源发电相结合,微电网可以提供比较可靠的电能[1-3]。另外,下垂控制策略广泛应用于交流微电网中,作为底层控制策略实现并网模式与孤岛模式之间的无缝切换[4,5]以及不同逆变器之间的功率均流[6,7]。在最近的研究中,多数是对下垂控制策略在孤岛模式下的工作进行了深入研究和分析[8-15],而并网模式下的工作性能分析研究却很少。
实际上,电网的工作并不是理想的,其存在着频率和电压幅值的波动。其中,电网电压幅值波动主要是因为负荷投切造成的,而电网频率波动则主要是因为发电机的输入功率和输出功率之间的不平衡所造成的[16]。下垂控制的功率流对于电网电压幅值波动和电网频率波动是非常敏感的。下垂控制环路中采用纯积分器[6,13]可以提高并网模式下功率控制的准确度,但是在孤岛模式下当整个逆变器的目标输出功率与负载不匹配时,积分会出现饱和,从而导致下垂控制的无缝切换性能无法实现。另外,文献[17]中采用了牛顿-拉弗逊迭代算法嵌入到下垂控制中,提高功率环路的动态响应,并且可以实时评估系统的参数。但这种方法计算负担大并且没有考虑到并网模式下的电网波动影响。另外,在无功功率控制环路中引入了积分环节,也会造成孤岛情况下无功功率负载不匹配时出现的积分饱和。文献[18-20]采用了不同的控制算法来抑制线路阻抗造成的无功功率分配不均问题,然而这些方法都没有考虑并网情况下的电网波动对无功功率的影响。
为了分析下垂控制策略在并网模式下的工作性能,解决并网模式情况下功率控制问题,本文首先分析了并网情况下电网电压幅值波动和电网频率波动对于功率潮流控制的影响。进而提出了电网电压幅值前馈和电网频率前馈来抑制电网波动的影响,并且对该控制算法的相关性能进行了详细的分析研究。另外,基于传统下垂控制算法和所提出前馈控制算法的无功功率控制存在静态跟踪误差的问题,提出了基于公共耦合点电压幅值控制的方法来实现无功功率的精确跟踪。通过将电网电压幅值与电网频率前馈控制和公共耦合点电压幅值控制相结合,实现下垂控制逆变器在并网模式下的精确功率控制,该算法在系统切换到孤岛模式时可以主动识别,保证下垂控制策略的模式无缝切换功能。
1 电网波动对功率控制影响的分析建模
在交流微电网中,电压源逆变器一般作为发电微源接入电网的接口。文中采用如图1a所示三相电压源并网逆变器简化结构,其中c为网侧滤波电感,c为c的寄生电阻,f为滤波电容,g为网侧电感(具体由隔离变压器漏感和线路电感组成),g为g的寄生电阻,f为馈线电感,f为f的寄生电阻。另外,Labc为逆变器侧电流,abc为滤波电容电压,gabc为网侧电流,gabc为电网电压。
传统下垂控制策略如图1b所示,其由有功功 率-频率下垂和无功功率-电压幅值下垂控制环路,虚拟阻抗环路和电压、电流双环组成,详细的研究设计可以参考文献[9,13],在此不再赘述。

(a)并网逆变器简化结构
(b)传统下垂控制策略
图1 系统结构与传统下垂控制策略
Fig.1 System structure and block diagram of the conventional droop control strategy
本文对于电网波动反映到功率控制中的影响进行了建模分析研究,具体的内容如下。
1.1 基于电网波动影响的建模
根据文献[9,13],可以得到电压、电流双环的数学模型为

式中,clu()为电压环闭环传递函数;ov()为逆变器等效输出阻抗;f()为馈线阻抗;rdq为输出电压的参考量;dq为同步参考坐标系下的滤波电容电压;gdq为同步参考坐标系下的电网电压;gdq为同步参考坐标系下的网侧电流。
令逆变器的参考轴作为整个系统的参考轴,则电网电压gdq可以表示为

式中,为逆变器频率;g为电网频率;ig为逆变器与电网之间的相位差,;g为电网电压幅值。
另外,根据图1b,可以得到

式中,、分别为有功功率和无功功率;0、0分别为有功功率和无功功率的参考值;f为功率计算低通滤波器的截止频率;0、0分别为额定工作频率和电压幅值;k、k分别为有功功率和无功功率下垂系数。
通过对式(1)~式(3)进行小信号线性化,并将其结果结合,可以得到系统的模型为

式中,Δ为小信号扰动的量;c0为系统的闭环传递函数矩阵;cPU()为电网电压幅值与有功功率之间的传递函数;cQU()为电网电压幅值与无功功率之间的传递函数;cP()为电网频率与有功功率之间的传递函数;cQ()为电网频率与无功功率之间的传递函数。
由于电网波动的频率非常小(一般小于0.1Hz),因此系统的稳定性主要由c0决定,而电网电压幅值和频率的波动对于功率控制的影响可以利用cPU(),cQU(),cP()和cQ()来进行解释分析。
1.2 电网波动对功率控制影响的分析
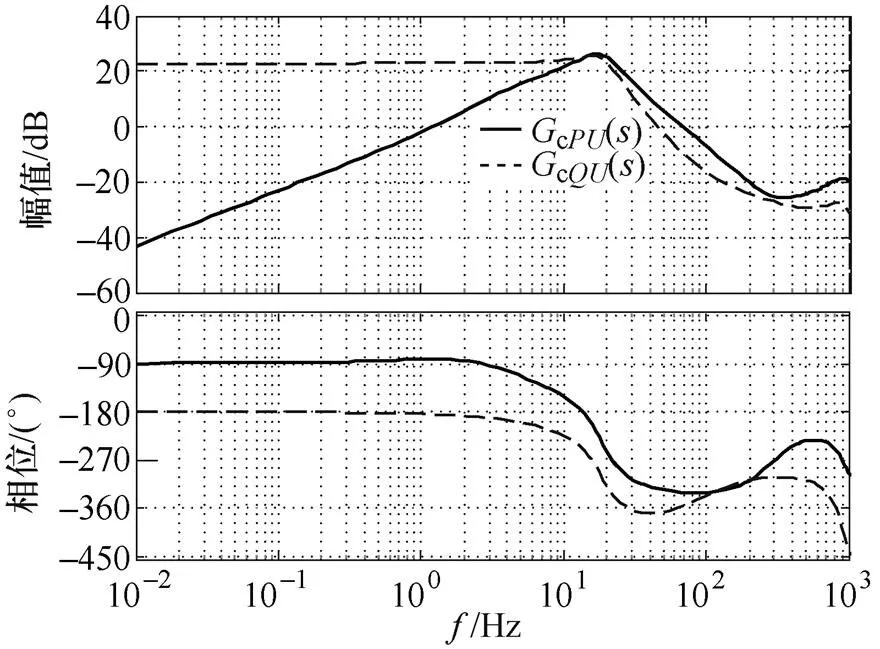
根据表1所示的系统硬件参数和控制参数,结合式(4),可以获得如图2所示的传统下垂控制情况下电网电压幅值与频率对于有功功率和无功功率的传递函数伯德图。从图2a可以看到,cPU()的低频增益要远低于cQU(),因此有功功率对于电网电压幅值的波动敏感度比较低。然而cQU()在低频段增益始终保持在无功功率下垂系数k的倒数上,因此无功功率对于电网电压幅值的波动在低频段有固定的敏感度,并且敏感度要远大于有功功率。
表1 系统硬件参数和控制参数
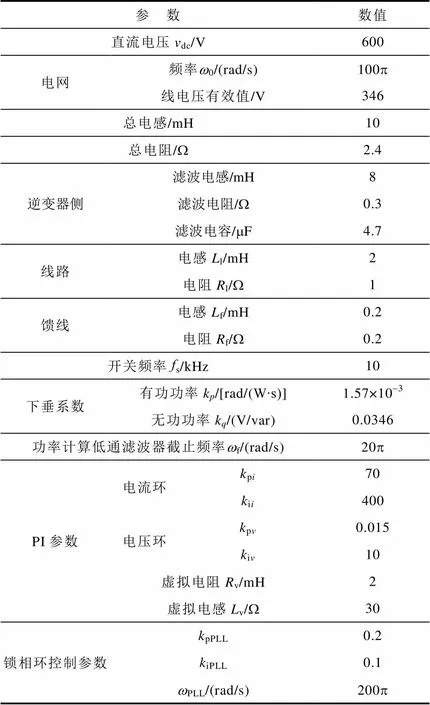
Tab.1 System hardware parameters and control parameters
(a)电网电压幅值
(b)电网频率
图2 传统下垂控制情况下电网电压幅值和频率对于有功功率和无功功率的传递函数伯德图
Fig.2 Bode diagrams of the transfer functions between grid voltage magnitude or grid frequency and power for conventional droop control strategy
另外,从图2b中可以看到,cP()在低频段的增益固定在有功功率下垂系数k的倒数上,表明有功功率对于电网频率的波动保持恒定的敏感度。比较cP()和cQU()在低频段的特性可以发现,cP()低频增益大于cQU(),因此有功功率对于电网频率的波动要比无功功率对于电网电压幅值的波动更敏感。一般来说,下垂控制中无功功率对于电网频率的波动并不敏感,然而cQ()在低频段也保持恒定的增益,所以无功功率对于电网频率的波动也很敏感,只是敏感度不及有功功率,该特性也表明有功功率和无功功率存在一定程度的耦合。
从以上的分析可以看到,电网频率和电网电压幅值的波动对于下垂控制逆变器的功率控制有显著的影响,需要采取相应的抑制策略来实现并网功率流的准确度和稳定性。
2 电网波动抑制策略
从第1节的分析可以发现,下垂控制逆变器在并网模式下工作时,功率流对于电网的波动十分敏感。为了抑制电网波动影响,本节提出了电网电压幅值和电网频率的前馈控制策略,具体分析如下。
2.1 电网电压幅值和电网频率前馈控制
电网频率和电网电压幅值可以利用同步参考坐标系下的锁相环来获取。然而,由于下垂控制策略广泛应用于分布式发电单元中,不同的发电单元通常分布在不同地点,测量电网电压并不实际。因此,文中提出利用测量公共耦合点(Point of Common Coupling,PCC)电压,并利用图3a所示同步参考坐标系下采用PCC电压为输入的锁相环来获取电网频率以及近似的电网电压幅值。电网电压幅值和电网频率前馈控制策略如图3b所示,通过将电网电压幅值和电网频率的前馈嵌入到下垂控制环路中,使得逆变器本身的输出电压幅值以及输出的频率可以和电网进行匹配,从而抑制电网波动对于功率控制的影响。并且当图3b中的选择开关切换到位置“1”,即为本文提出的前馈控制策略。

(a)同步参考坐标系下采用PCC电压为输入的锁相环
(b)提出的电网电压幅值和电网频率前馈的控制策略
图3 提出的抑制电网波动的控制策略
Fig.3 Proposed strategy for the mitigation of grid fluctuation impacts on power flow control
2.2 所提出策略的性能分析
近似于第1节中的建模策略,可以获得所提出的控制策略的模型为

根据表1中的参数,可以获得锁相环带宽为1Hz情况下的所提前馈控制算法的电网电压幅值和频率对于有功功率和无功功率的传递函数伯德图,如图4所示。通过与图2进行比较可以发现(下文中研究的低频增益指的是低于0.1Hz的增益部分):
(a)电网电压幅值

(b)电网频率
(1)gPU()低频增益比cPU()略高,而gQU()低频增益远小于cQU()。因此,电网电压幅值波动对于无功功率的影响被所提控制策略很好地抑制。因为gPU()低频段增益仍然是低于0,所以电网电压幅值波动对于有功功率的影响也非常有限。
(2)gP()和gQ()的低频段增益相比cP()和cQ()显著降低,因此利用提出的控制策略可以大大降低电网频率的波动对于有功功率和无功功率的影响。
另外,通过将锁相环的带宽提高到30Hz(pPLL= 1,iPLL=1和PLL2p×100rad/s),可以得到:
(1)从图4a中可以看到,gPU()和gQU()的低频段增益在不同锁相环带宽的情况下保持一致,因此锁相环并不会影响电网电压幅值波动对功率控制的影响。
(2)从图4b中可以看到,gP()和gQ()的低频段增益随着锁相环带宽的增大进一步降低,因此高带宽的锁相环可以进一步抑制电网频率波动对于有功功率和无功功率的影响。
2.3 所提算法对于模式切换的影响
并网模式下工作时,频率和电压幅值会被刚性电网钳位,然而在孤岛模式下,却是由逆变器自身来控制的。所以,提出的前馈控制在孤岛模式下,会造成频率和电压幅值的正反馈。然而,该正反馈刚好可以用来实现孤岛检测。采用图5所示的在检测到孤岛时的算法切换策略,利用正反馈造成的电压幅值偏移和频率偏移完成孤岛检测,判断为孤岛模式后将前馈项切换为额定的工作频率以及电压幅值(即将图3b中的选择开关切换到“2”位置)。因此,所提前馈控制策略仍然可以保证并网和孤岛之间的无缝切换。

图5 所提算法在检测到孤岛时的算法切换策略
3 改进型的功率控制策略
从式(5)中的闭环传递函数矩阵f0的对角项,可以获得所提前馈控制策略的有功功率环路闭环传递函数gP()和无功功率环路闭环传递函数gQ(),所提前馈控制算法与改进型功率控制策略的闭环传递函数伯德图如图6所示,可以看到其无功功率控制闭环传递函数低频增益不为0,无功功率跟踪存在静态误差。

图6 所提前馈控制算法与改进型功率控制策略的闭环传递函数伯德图
因此,为了解决所提前馈控制策略的无功功率跟踪精度问题,本文提出如图7所示的改进型功率控制策略。在无功功率控制环路中引入PCC电压幅值控制环,因为积分环节的引入,可以实现无功功率的无静差跟踪(积分环节的增益v=4)。

图7 所提出的改进型的功率控制策略
类似地,可以得到改进型控制策略的模型为

(6)
由闭环传递函数矩阵gM0的对角项,可以获取所提改进型控制算法的有功功率环路闭环传递函数gPM()和无功功率环路闭环传递函数gQM(),其伯德图如图8所示,gQM()的低频增益为0,因此所提改进型算法可以实现对于无功功率的准确跟踪。
(a)电网电压幅值
(b)电网频率
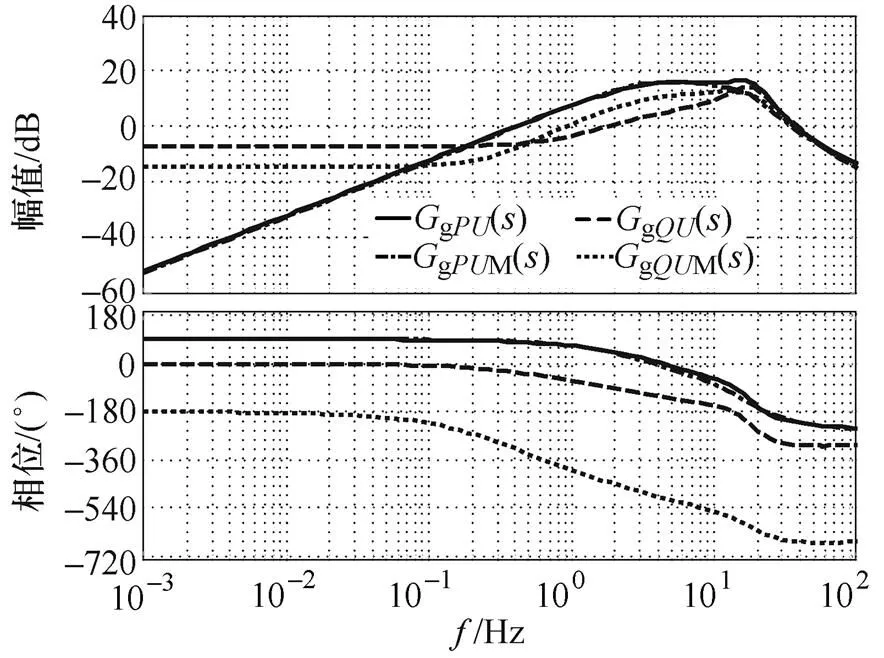
图8 两种控制策略情况下的电网电压幅值和频率对于有功功率和无功功率的传递函数伯德图
Fig.8 Bode diagram of the transfer functions between grid voltage magnitude or grid frequency and power for proposed control strategy and modified scheme
对比两种控制算法的电网电压幅值和频率对于有功功率和无功功率的传递函数伯德图,如图8所示,可以得到:
(1)由于gPU()与gP()分别和gPUM()与gPM()相匹配,因此引进的PCC电压幅值控制环不会改变电网电压幅值以及电网频率波动对于有功功率的影响。
(2)由于gQUM()与gQM()的低频段增益分别比gQU()与gQ()都要小,因此改进型控制算法对于电网电压幅值和电网频率波动对无功功率的影响有一定的抑制作用。
4 仿真与实验
为了验证前文的分析,本文进行了相关的仿真与实验验证,实验平台是基于一台2kV·A的原型样机,控制器利用RT-LAB来实现,而仿真结果则是利用Simulink获取的。该原型样机的硬件参数以及相关控制参数见表1。下述实验波形中的电网电压幅值g和电网频率g是通过测量PCC点得到的,由于线路阻抗的原因,测量得到的g和g会受到并网功率的微弱影响。
在功率指令为有功功率500W和无功功率200var时,传统的下垂控制策略在电网波动情况下的实验波形如图9所示。图9a中,电网的电压幅值和频率存在低频的波动,在整个过程中,电网电压幅值最大波动频率为0.046Hz,而电网频率的最大波动频率为0.071Hz。另外,稳态情况下的电压和电流波形如图9b所示。在传统的下垂控制情况下,有功功率和无功功率受到电网波动的影响也会出现波动。并且,尽管电网电压幅值和电网频率的波动幅值很小,但是反映到有功功率和无功功率上却会存在较大的波动。另外从图9c中可以看到,当施加有功功率指令阶跃和无功功率指令阶跃时,功率无法准确地跟踪其指令的变化。因此,电网波动情况下,功率控制的准确性无法保证。

(a)有功功率和无功功率的稳态实验波形
(b)电压、电流稳态实验波形
(c)阶跃实验波形
而在同样功率指令下,所提出的前馈控制策略的实验和仿真波形如图10所示,尽管电网的低频波动仍然存在,但是有功功率和无功功率的波动明显被抑制了。而且,有功功率可以准确地跟踪其指令的变化,然而由于无功功率环路没有积分环节,造成无功功率的控制存在静差,无功功率无法实现对于其指令的准确跟踪。利用仿真可以获取不同锁相环带宽下的功率仿真波形如图10c所示,在电网频率波动范围为±0.05Hz并且波动频率为0.1Hz时,提高锁相环带宽可以进一步抑制频率波动造成的功率波动。

(a)功率指令存在阶跃时的实验波形
(b)电压、电流稳态实验波形
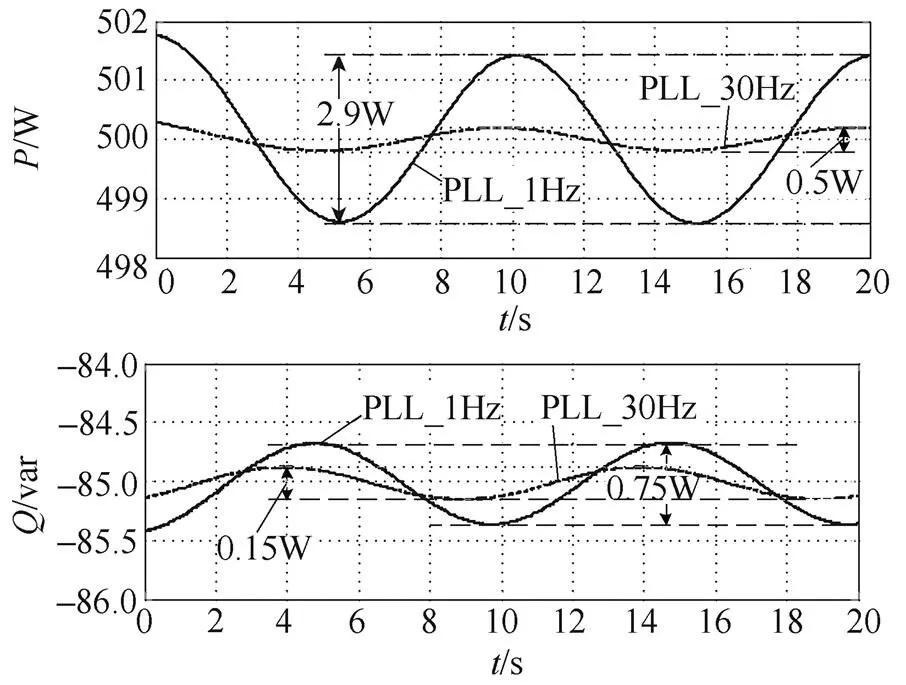
(c)不同锁相环带宽下的功率仿真波形(电网频率波动范围为±0.05Hz,波动频率为0.1Hz)
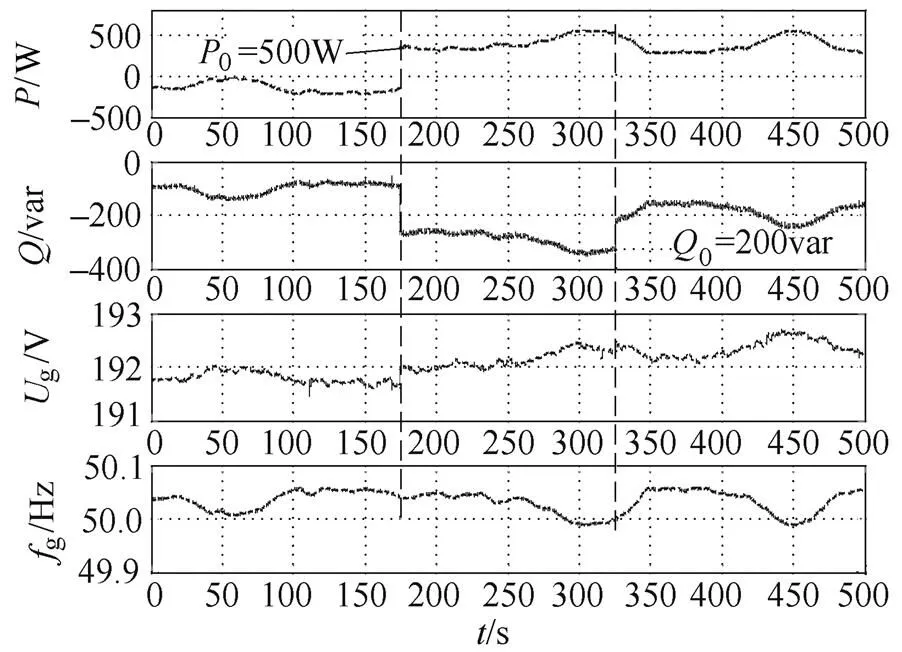
另外,在相同功率指令下,所提出的改进型功率控制策略的实验波形如图11所示。可以看到,电网低频波动对于有功功率和无功功率的影响明显被抑制,而且相比于传统的下垂控制策略以及所提出的前馈控制策略,无功功率能够比较好地跟踪其指令的变化。因此,所提出的改进型功率控制策略提高了无功功率控制准确度,从而能够实现并网情况下功率的准确控制。
(a)功率指令存在阶跃时的实验波形
(b)电压、电流稳态实验波形
图11 所提出的改进型功率控制策略的实验波形
Fig.11 Experimental waveforms for proposed modified power flow control strategy
改进型功率控制策略模式切换时的有功功率、无功功率、输出相电压幅值和逆变器频率实验波形如图12所示。

图12 所提出的改进型功率控制策略模式切换时的有功功率、无功功率、输出相电压幅值和逆变器频率实验波形
图12中,并网模式下有功功率和无功功率指令为0,孤岛模式下为空载,且输出相电压幅值上、下限分别为220V和180V,逆变器工作频率上、下限分别为51Hz和49Hz。可以看到,当静态开关断开时,逆变器由并网模式切换到孤岛模式,由于正反馈的作用,输出相电压幅值快速上升到门限值220V。检测到孤岛后,通过采用图5所示的算法切换方法,实现孤岛模式下的正常运行。由于PCC电压幅值控制环路积分增益是频率积分增益的4倍,所以输出电压幅值的发散速度要快于频率。因此,所提出的改进型功率控制策略能够实现并网模式向孤岛模式的无缝切换。
比较如图13所示的三种控制策略在相同的电网波动情况下的功率波动仿真波形,可以看到所提出的前馈控制和改进型控制策略可以很好地抑制功率波动,并且改进型控制策略可以实现无功功率的无静差跟踪。图13中,功率指令为有功功率500W和无功功率200var,电网电压幅值波动范围为±10V,电网频率波动范围为±0.05Hz,两种情况的波动频率均为0.1Hz。

(a)仅存在电网电压幅值波动情况下
(b)仅存在电网频率波动情况下
图13 三种控制策略在相同的电网波动情况下的功率波动仿真波形
Fig.13 Simulation waveforms of the power flow with the same grid fluctuation conditions
在电网电压THD=1.5%时,对于所提出的改进型功率控制策略并网电流各次谐波含量如图14所示,在500W/200var情况下(不到半载)并网电流THD=5.87%,而在1.2kW情况下并网电流THD= 4%,并网电流THD满足国际标准。因此,在半载以上该逆变器的并网电流能够满足入网要求。另外,文中主要考察对于功率潮流的控制,即使存在比较大的并网电流谐波,提出的控制算法仍然能够保证功率潮流的准确控制。
5 结论
1)建立了整个系统的模型,并且在所提出的模型基础上分析了传统下垂控制策略在电网存在电压幅值和频率波动情况下功率控制所受的影响。
2)提出了PCC电压幅值和频率前馈的方法,该方法可以很好地抑制电网波动对于功率控制的影响。另外,分析了该方法的具体性能,发现提高锁相环带宽有助于进一步抑制电网波动的影响。该方法在孤岛情况下形成的正反馈有助于孤岛检测,从而保证并网模式与孤岛模式之间的无缝切换。
3)基于所提出的前馈控制策略存在无功功率跟踪静态误差的问题,提出了改进型的功率控制策略。该策略通过在无功功率下垂环路引入PCC电压幅值控制环,使得无功功率下垂环路中存在积分环节,能够实现对于无功功率的无静差跟踪。另外,所提出的改进型功率控制策略仍然可以保证与所提前馈控制策略对于电网波动影响同样的抑制作用,并且实现下垂控制逆变器并网功率的精确控制。
参考文献:
[1] Lasseter R H. MicroGrids[C]//Power Engineering Society Winter Meeting, 2002: 305-308.
[2] 王成山, 武震, 李鹏. 微电网关键技术研究[J]. 电工技术学报, 2014, 29(2): 1-12.
Wang Chengshan, Wu Zhen, Li Peng. Research on key technologies of microgrid[J]. Transactions of China Electrotechnical Society, 2014, 29(2): 1-12.
[3] 窦春霞, 李娜, 徐晓龙. 基于多智能体系统的微电网分散协调控制策略[J]. 电工技术学报, 2015, 30(7): 125-134.
Dou Chunxia, Li Na, Xu Xiaolong. Multi-agent system based decentralized coordinated control strategy for micro-grids[J]. Transactions of China Electrotechnical Society, 2015, 30(7): 125-134.
[4] Liu Z, Liu J, Zhao Y. A unified control strategy for three-phase inverter in distributed generation[J]. IEEE Transactions on Power Electronics, 2014, 29(3): 1176-1191.
[5] 邱麟, 许烈, 郑泽东, 等. 微电网运行模式平滑切换的控制策略[J]. 电工技术学报, 2014, 29(2): 171-176.
Qiu Lin, Xu Lie, Zheng Zedong, et al. Control method of microgrid seamless switching[J]. Transa- ctions of China Electrotechnical Society, 2014, 29(2): 171-176.
[6] Guerrero J M, Chandorkar M, Lee T, et al. Advanced control architectures for intelligent microgrids-part I: decentralized and hierarchical control[J]. IEEE Transactions on Industrial Electronics, 2013, 60(4): 1254-1262.
[7] 荆龙, 黄杏, 吴学智. 改进型微源下垂控制策略研究[J]. 电工技术学报, 2014, 29(2): 145-153.
Jing Long, Huang Xing, Wu Xuezhi. Research on improved microsource droop control method[J]. Transactions of China Electrotechnical Society, 2014, 29(2): 145-153.
[8] Guerrero J M, Loh P C, Lee T, et al. Advanced control architectures for intelligent microgrids-part II: power quality, energy storage, and AC/DC micro- grids[J]. IEEE Transactions on Industrial Electronics, 2013, 60(4): 1263-1270.
[9] Liu Q, Tao Y, Liu X, et al. Voltage unbalance and harmonics compensation for islanded microgrid inver- ters[J]. IET Power Electronics, 2014, 7(5): 1055-1063.
[10] He J, Li Y W, Guerrero J M, et al. An islanding microgrid power sharing approach using enhanced virtual impedance control scheme[J]. IEEE Transa- ctions on Power Electronics, 2013, 28(11): 5272- 5282.
[11] 刘海涛, 吕志鹏, 苏剑, 等. 具有功率精确分配能力的逆变器电压谐波分频下垂控制方法研究[J]. 电力系统保护与控制, 2015, 43(19): 9-14.
Liu Haitao, LüZhipeng, Su Jian, et al. Inverter’s frequency dividing droop controller with accurate load sharing ability[J]. Power System Protection and Control, 2015, 43(19): 9-14.
[12] Zhong Q. Robust droop controller for accurate proportional load sharing among inverters operated in parallel[J]. IEEE Transactions on Industrial Elec- tronics, 2013, 60(4): 1281-1290.
[13] Tao Y, Liu Q, Deng Y, et al. Analysis and mitigation of inverter output impedance impacts for distributed energy resource interface[J]. IEEE Transactions on Power Electronics, 2015, 30(7): 3563-3576.
[14] 吴翔宇, 沈沉, 赵敏, 等. 基于公共母线电压的微电网孤网运行下垂控制策略[J]. 电工技术学报, 2015, 30(24): 135-142.
Wu Xiangyu, Shen Chen, Zhao Min, et al. A droop control method based on PCC bus voltage in islanded microgrid[J]. Transactions of China Electrotechnical Society, 2015, 30(24): 135-142.
[15] 孟建辉, 石新春, 王毅, 等. 改善微电网频率稳定性的分布式逆变电源控制策略[J]. 电工技术学报, 2015, 30(4): 70-79.
Meng Jianhui, Shi Xinchun, Wang Yi, et al. Control strategy of DER inverter for improving frequency stability of microgrid[J]. Transactions of China Electrotechnical Society, 2015, 30(4): 70-79.
[16] Kundur P. Power system stability and control[M]. New York: McGraw-Hill Professional, 1994.
[17] Min D, Marwali M N, Jin-Woo J, et al. Power flow control of a single distributed generation unit[J]. IEEE Transactions on Power Electronics, 2008, 23(1): 343-352.
[18] Li Y W, Kao C. An accurate power control strategy for power-electronics-interfaced distributed gener- ation units operating in a low-voltage multibus micro- grid[J]. IEEE Transactions on Power Electronics, 2009, 24(12): 2977-2988.
[19] 苏虎, 曹炜, 孙静, 等. 基于改进下垂控制的微网协调控制策略[J]. 电力系统保护与控制, 2014, 42(11): 92-98.
Su Hu, Cao Wei, Sun Jing, et al. Micro-grid coor- dinated control strategy based on improved droop control[J]. Power System Protection and Control, 2014, 42(11): 92-98.
[20] 徐玉琴, 马焕均. 基于改进下垂控制的逆变器并联运行技术[J]. 电力系统保护与控制, 2015, 43(7): 103-107.
Xu Yuqin, Ma Huanjun. Parallel operation techno- logy of inverters based on improved droop control[J]. Power System Protection and Control, 2015, 43(7): 103-107.
Power Flow Control Strategy for Droop-Controlled Inverters
(College of Electrical Engineering Zhejiang University Hangzhou 310027 China)
Droop control strategy is widely applied in AC microgrid to realize the seamless transition between grid-connected (GC) mode and islanding (IS) mode, and to achieve average power sharing among different inverters. However, there is a lack of analysis about the operation of droop control strategy in GC mode. Actually, the power flow control in GC mode may be influenced by the fluctuation of grid frequency and voltage magnitude. Moreover, tracking error also exists in the reactive power control loop. The feedforward of grid frequency and voltage magnitude is proposed to suppress the grid fluctuation impacts in this paper. The voltage magnitude control of PCC voltage is added to realize the precise reactive power control. With the implementation of the proposed control scheme, accurate power flow control is guaranteed for droop-controlled inverters in GC mode.
Droop control, grid fluctuation, power flow control, feedforward control of grid frequency and voltage magnitude, voltage magnitude control of common coupling point
TM464
国家高技术研究发展计划(863计划)资助项目(2011AA050202)。
2015-10-21 改稿日期 2016-04-20
陶 勇 男,1990年生,博士,研究方向为交流微电网。E-mail: taoyong58@126.com(通信作者)
邓 焰 男,1973年生,副教授,硕士生导师,研究方向为DC-DC变换器、微电网系统控制及建模等。E-mail: dengyan@zju.edu.cn
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
新世纪智能(语文备考)(2020年9期)2020-12-31
水泥工程(2020年4期)2020-12-18
计量学报(2020年7期)2020-08-07
液压与气动(2020年4期)2020-04-10
新高考(英语进阶)(2018年1期)2018-04-18
电子制作(2017年7期)2017-06-05
创新作文(小学版)(2017年33期)2017-04-04
光学精密工程(2016年4期)2016-11-07
电测与仪表(2016年15期)2016-04-12