
一种改进的CIR法用于单历元模糊度解算
2016-12-19 03:14魏国华彭学武王旭
北京理工大学学报 2016年11期
魏国华, 彭学武, 王旭
(北京理工大学 信息与电子学院,北京 100081)
一种改进的CIR法用于单历元模糊度解算
魏国华, 彭学武, 王旭
(北京理工大学 信息与电子学院,北京 100081)
针对级联整周模糊度解算(CIR)法在载波相位和伪距观测噪声很大的场合,模糊度固定成功率很低这一问题,提出了一种改进的CIR法,该算法以CIR法为基础,利用排序和连续(逆)乔里斯基降相关法对每步最小二乘法求得的模糊度浮点解和协方差矩阵进行降相关,最后采用改进的最近点搜索(MAEVZ)法固定整周模糊度. 仿真实验表明,在伪距观测噪声为2.0 m,载波相位观测噪声为0.03周的短基线环境下,CIR法单历元整周模糊度解算成功率已经低于5%,无法正确固定整周模糊度,而改进的CIR法单历元整周模糊度解算成功率仍能达到90%以上.
CIR法;载波相位;MAEVZ法;整周模糊度
随着GPS的现代化,GPS新增L5段载频信号用于民用航空导航,北斗导航系统也已使用3个频率的载波信号,在短基线情况下,利用三频载波信号可以有效可靠地固定整周模糊度,一旦正确的整周模糊度被固定,载波相位观测值将担当高精度的伪距观测值,从而使高精度的定位测量成为可能,因此实时可靠地固定三频[1]模糊度的方法已经成为研究的热点. TCAR(three carrier ambiguity resolution)最初研究目的用于Gaileo计划的GNSS-2[2],CIR(cascade integer resolution)则是用于GPS现代化系统. 这两种CIR法[3]对模糊度的搜索采取最简单的取整方式,计算简单,因此在载波相位和伪距观测噪声很大的环境下其解算整周模糊度的成功率很低. 范建军[4]提出利用虚拟观测值的统计特性来构造宽巷和超宽巷模糊度搜索空间,然后在构造的搜索空间中对整周模糊度进行搜索,提高了模糊度固定成功率,其模糊度固定成功率的提高依赖于模度确认准则;唐卫明[5]提出了LAMBDA-CIR法,它采用LAMBDA搜索算法来固定宽巷、超宽巷及基础整周模糊度,虽然LAMBDA搜索算法计算复杂,搜索耗时,但是整周模糊度固定成功率却得到很大的提高;Agrell,Eriksson,Vardy,Zeager[6]在格理论中提出了最近点搜索算法(AEVZ法);S.Jazaer[7]在高维情况下将AEVZ法与LAMBDA、MLAMBDA[8]、M-VB及M-SE算法的搜索速度进行了比较,AEVZ法搜索速度明显优于其他方法.
本文针对直接取整的方式固定整周模糊度,计算简单,但是无法适应复杂噪声环境;而采用LAMBDA-CIR法固定整周模糊度计算复杂,搜索耗时,这些问题提出了MAEVZ-CIR法,通过仿真实验表明整周模糊度固定成功率比CIR法有很大提高,与LAMBDA-CIR法相当,但是其搜索速度优于LAMBDA-CIR法.
1 CIR法及误差分析
1.1 数学模型及误差分析
当分别安置在基准站和流动站的两台三频接收机共视n+1颗卫星时,每一历元可组成如下伪距双差观测方程和载波相位双差观测方程,短基线情况下进行双差可以消除电离层、对流层等大部分误差,因此可以构成如下观测方程.
Δρ(i,j,k)=ΔR+Δερ(i,j,k).
(1)
λ(i,j,k)Δφ(i,j,k)=ΔR-λ(i,j,k)ΔN(i,j,k)+
(2)
(3)
(4)
Δρ(l,m,n)-λ(i,j,k)Δφ(i,j,k)=λ(i,j,k)ΔN(i,j,k)+
(5)
对于GPS系统3个频率所对应的伪距和载波相位有如下所示关系:σ=σ=σ,σ=nσ,σ=σ=σ=σ,如采取直接取整求解整周模糊度,则整周模糊度和对应伪距估计值为
ΔN(i,j,k)=round(Δρ(l,m,n)/λ(i,j,k)-Δφ(i,j,k)).
(6)
(7)
相应的整周模糊度和伪距估计值对应的均方误差为
(8)
(9)
1.2 CIR法分析
采用CIR法进行整周模糊度解算,其计算过程分为3步:
① 将超宽巷相位观测值与L5伪距观测值差分,取整得到超宽巷整周模糊度.
观测噪声引起的超宽巷整周模糊度估计均方误差为
② 将宽巷相位观测值与超宽巷伪距估计值差分,取整得到宽巷整周模糊度.
ΔN(1,-1,0)=
Δφ(1,-1,0).
(12)
观测噪声引起的宽巷整周模糊度估计均方误差为
σ=
③ 将L1相位观测值与宽巷伪距估计值差分,取整得到基础整周模糊度.
ΔN1=
观测噪声引起的基础整周模糊度估计均方误差为
(16)
直接取整法的归整域实际上是一个边长为1,中心为Z的n方体,所以模糊度成功率为
对于CIR法来说,它的成功率下界为PB=PB,1×PB,2×PB,3,其中PB,i表示第i步固定模糊度成功率.
表1 CIR法每步对应的模糊度均方误差和成功率
Tab.1 Ambiguity RMSE of each step and the success rate of CIR method

步骤条件1条件2σÑΔN(i,j,k)成功率/%σÑΔN(i,j,k)成功率/%10.18599.310.30989.4420.48669.640.61558.3830.32487.720.41077.42
由表1可知随着载波相位和伪距观测噪声的增加,CIR法各步骤中解算得到的整周模糊度均方差在增大,整周模糊度波动随之变大,模糊度固定成功率在降低. 若采取直接取整的方式得到模糊度整数解,那么随着载波相位和伪距观测噪声的增加,模糊度固定成功率将越来越低. 其中第二步宽巷整周模糊度均方差要比其他各个步骤中得到的整周模糊度均方差大,是造成最终CIR法在复杂噪声环境下整周模糊度固定成功率低的主要原因. 因此文中考虑在CIR法每步解算整周模糊度的过程中,先建立一个搜索空间,然后再在此搜索空间进行整周模糊度的搜索.
2 MAEVZ-CIR法
2.1 MAEVZ法
LAMBDA的搜索方法是在一个以向量x为中心,半径为r的多维球内搜索整数格点,如果半径r太大,那么球内就包含过多的候选模糊度整数向量,其计算复杂度不再是多项式时间,将接近或达到指数时间. 如果搜索半径太小,那么可能不存在符合要求的模糊度整数向量,导致模糊度解算失败. Agrell,Eriksson,Vardy,Zeager等结合Fincke-Pohst算法和Schnorr-Euchner算法,提出了一种转折的序贯缩小半径的搜索方法,可以有效地提高模糊度的搜索效率,这种方法也就是格理论中的最近点搜索(AEVZ)算法.

由图1、图2可知,LAMBDA法搜索耗时最长,MLAMBDA法次之,AEVZ法搜索时间和MAEVZ法接近,相对较短,而且随着维数的增加,AEVZ法搜索时间与LAMBDA搜索时间之差越来越大. 在高维情况下,MAEVZ搜索效率要优于AEVZ法. 相比于其他3种方法,无论在高维还是低维的情况下,MAEVZ法都具有更高的搜索效率,并且其搜索的范围比直接取整的搜索范围大,因此其将以更大的概率包含正确整周模糊度.
2.2 CIR法的改进
由于连续和排序(逆)乔里斯基去相关法具有很好的去相关效果,可提高后续的模糊度搜索效率,而且MAEVZ法的搜索效率明显优于LAMBDA法,最为重要的是其整周模糊度固定成功率要比直接取整的搜索方式高. 将MAEVZ法应用于CIR法中,其改进步骤如下.
① 将L1、L2、L5伪距观测值和超宽巷载波相位观测值共同组成式(18)观测方程.



3 算例分析
实验的数据通过仿真产生,基准站固定在经度为116°,纬度为40°,高度为60 m的地方,流动站和基准站有相同的初始Y、Z坐标,X坐标相差2 000 m,流动站以vx=20 m/s速度向基准站运动,通过模拟的GPS星座和流动站及基准站的坐标生成1 000个历元的载波相位观测值和伪距观测值等.
为了验证MAEVZ-CIR和LAMBDA-CIR法相对于CIR法能够适应更加复杂的噪声环境,并比较它们的实时性,向每一历元载波相位无噪声观测值φ和接收机到卫星之间几何距离R中分别加入载波相位观测噪声和伪距观测噪声为
式中:ρ为伪距观测值;φ为载波相位观测值;σρ为伪距观测噪声均方差;σφ为载波相位观测噪声均方差;randn为产生均值为0,均方差为1的随机矩阵.
解算程序运行1 000次,每次对1 000个历元的观测数据采用MAEVZ-CIR法,LAMBDA-CIR法及CIR法进行单历元整周模糊度解算,成功率按式(22)计算. 其单历元解算整周模糊度成功率如表2所示,平均解算时间如表3所示,其中方法1为MAEVZ-CIR法,方法2为LAMBDA-CIR法,方法3为CIR法.
表2 不同算法单历元解算模糊度成功率
Tab.2 Success rates of different method to resolve ambiguity in single epoch
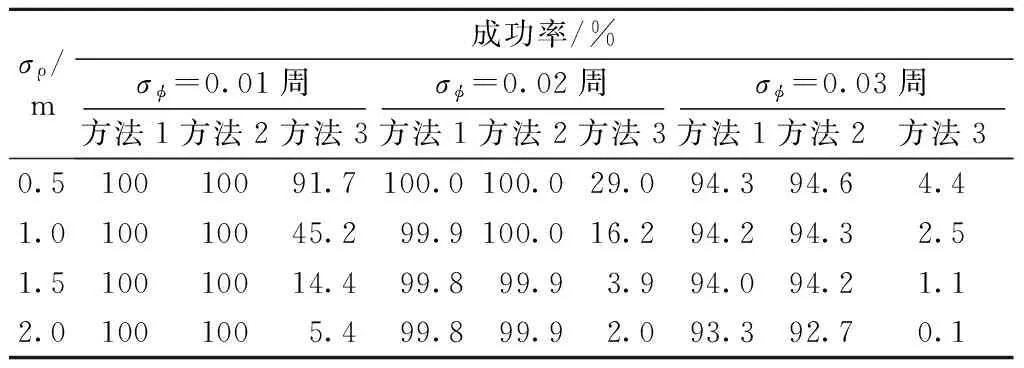
σρ/m成功率/%σϕ=0.01周σϕ=0.02周σϕ=0.03周方法1方法2方法3方法1方法2方法3方法1方法2方法30.510010091.7100.0100.029.094.394.64.41.010010045.299.9100.016.294.294.32.51.510010014.499.899.93.994.094.21.12.01001005.499.899.92.093.392.70.1

表3 不同算法单历元解算模糊度的平均时间
由表2,表3可以看出CIR法由于对模糊度的搜索采取直接取整的方式,因此其计算简单,解算时间短,当卫星高度角很低时或受到多径影响时载波相位和伪距噪声将增大,这时解算整周模糊度的成功率将降低. 当采用MAEVZ-CIR法对模糊度进行搜索时,由于其在收缩的搜索半径内对整周模糊度进行搜索,因此其计算更为复杂,搜索时间较CIR法要长,但是在这个收缩的搜索半径内包含正确整周模糊度的概率要远大于直接取整的方式,因此它能更好地适应载波相位和伪距噪声很大的环境. 由表2可以看出伪距观测噪声变化时,MAEVZ-CIR法的整周模糊度固定成功率仅有约0.1%的变化,因此其对伪距观测噪声不敏感,而它对CIR法模糊度固定成功率的影响却很大. 载波相位观测噪声对于CIR法模糊度固定成功率影响相对于MAEVZ-CIR法的影响要大,但两者都有不同程度的影响. 在载波相位观测噪声为0.03周的情况下,CIR法固定整周模糊度的成功率已经低于10%,无法正确固定整周模糊度,而MAEVZ-CIR法仍能保持90%以上的固定成功率. 由于CIR法采用直接取整的搜索方式,因此其解算时间最短,而MAEVZ-CIR法则牺牲了一定的搜索时间来换取整周模糊度固定成功率的提高,其模糊度固定成功率与LAMBDA-CIR法相当,但是它的模糊度固定成功率相对于原CIR法却得到了大大提高,而且解算速度要优于LAMBDA-CIR法.
在伪距观测噪声为1 m,载波相位观测噪声为0.03周的条件下,通过MAEVZ-CIR法解得的流动站与基准站之间的基线长度和流动站与基准站之间真实的基线长度误差如图3所示. 将单历元解算出的整周模糊度反解得到的流动站坐标与真实流动站坐标求差并作比较,可得流动站各个历元x、y、z3个方向的坐标误差序列如图4所示.
从图3,图4可以看出,流动站与基准站之间的基线误差小于3 cm,x、y、z3个方向的所有历元的坐标误差值都小于3 cm,这表明了模糊度被正确固定,从而验证了该算法的正确性和有效性.
4 结 论
针对载波相位和伪距观测噪声不理想时使用CIR法时整周模糊度固定的成功率不高这一问题,结合MAEVZ法搜索整周模糊度效率高这一特点,对CIR法进行了改进,改进的CIR法能够适应载波相位和伪距观测噪声更加复杂的环境,并有效地提高了单历元整周模糊度固定的成功率,而且此法并不限制接收机是静止还是运动,具有一定的实用价值.
[1] Hatch R, Jung J, Enge P. Civilian GPS: the benefits of three frequencies[J]. GPS Solut, 2000,3(4):1-9.
[2] Vollath U, Birnbach S, Landau H. Analysis of three-carrier ambiguity resolution (TCAR) technique for precise relative positioning in GNSS-2[C]∥Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation. Nashville, TN: [s.n.], 1998:417-426.
[3] Zhang W, Cannon M, Julien O. Investigation of combined GPS/Galileocascading ambiguity resolution schemes[C]∥Proceedings of ION GPS/GNSS. Portland, OR: [s.n.], 2003:2599-2610.
[4] 范建军,王飞雪.一种短基线GNSS的三频模糊度解算(TCAR)方法[J].测绘学报,2007,36(1):43-49.
Fan Jianjun,Wang Feixue. A method for GNSS three frequency ambiguity resolution based on short baselines[J]. Acta Geodaetica et Cartographica Sinica, 2007,36(1):43-49. (in Chinese)
[5] Tang Weiming, Deng Chenlong, Shi Chuang. Triple-frequencycarrier ambiguity resolution for Beidou navigation satellite system[J]. GPS Solut, 2014,18:335-334.
[6] Agrell E, Eriksson T, Vardy A. Closest point search in lattices[J]. IEEE Transactions on Information Theory, 2002,48(8):2201-2214.
[7] Jazaeri S, Amiri-Simkooei A R, Sharifi M A. Fast integer least-squares estimation for GNSS high-dimensional ambiguity resolution using lattice theory[J]. Journal of Geodesy, 2012,86:123-136.
[8] Chang X, Yang X, Zhou T. MLAMBDA: a modified LAMBDA algorithm for integer least-squares estimation[J]. Journal of Geodesy, 2005,79:552-565.
[9] Zhou Yangmei. A new practical approach to GNSS high-dimensional ambiguity decorrelation[J]. GPS Solut, 2011,15:325-331.
[10] Jazaeri S, Amiri-Simkooei A, Sharifi M. Modified weighted integer least squares estimations for GNSS integer ambiguity resolution[J]. Survey Review, 2014,46:112-121.
(责任编辑:刘芳)
Resolve Integer Ambiguity in Single Epoch Occasion by a Improved CIR Method
WEI Guo-hua, PENG Xue-wu, WANG Xu
(School of Informationand Electronics, Beijing Institute of Technology, Beijing 100081, China)
In order to solve the problem of the lower success rate to fix ambiguity with CIR method when the carrier phase observation noise and pseudorange observation noise are quite large, an improved CIR method was proposed. The ordering and multi-time (inverse) paired Cholesky decomposition method were used to reduce the correlation of ambiguity float solution and covariance matrix with the least square method. And then the MAEVZ method was used to search the fixed integer ambiguity. Simulation results show that, when the pseudorange observation noise is 2.0 m and carrier phase observation noise is 0.03 cycle, the success rate of integer ambiguity resolution is below 5% with CIR method and it can’t accurately fix integer ambiguity, however the success rate of integer ambiguity resolution is beyond 90% with the improved CIR method.
cascade integer resolution method; carrier phase; MAEVZ method; integer ambiguity
2014-07-14
国家自然科学基金资助项目(61421001,61671059)
彭学武(1990—),男,硕士生,E-mail:pengxuewu2006@126.com.
王旭(1974—),男,讲师,硕士生导师,E-mail:wangxu@bit.edu.cn.
P 228.4
A
1001-0645(2016)11-1177-06
10.15918/j.tbit1001-0645.2016.11.015
猜你喜欢
地理空间信息(2022年10期)2022-10-31
导航定位学报(2021年5期)2021-10-13
导航定位学报(2021年2期)2021-04-22
导航定位学报(2020年6期)2021-01-05
全球定位系统(2019年4期)2019-08-30
测绘通报(2019年3期)2019-04-03
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
科技创新与品牌(2016年1期)2016-05-04
